






无人驾驶车辆基于双pid和lqr的纵横向联合控制,跟踪五次多项式,纵向控制上帮你制作了标定表并保存,无需自己去跑数据得到电机或发动机的标定数据,,carsim19版本
ID:9550680109303164
规控算法工程师
无人驾驶车辆是当今科技领域备受瞩目的前沿技术之一。基于双PID(比例积分微分)和LQR(线性二次调节)的纵横向联合控制技术,为无人驾驶车辆的控制提供了有效的解决方案。本文将围绕该技术展开讨论,探讨其在无人驾驶车辆领域的应用和优势。
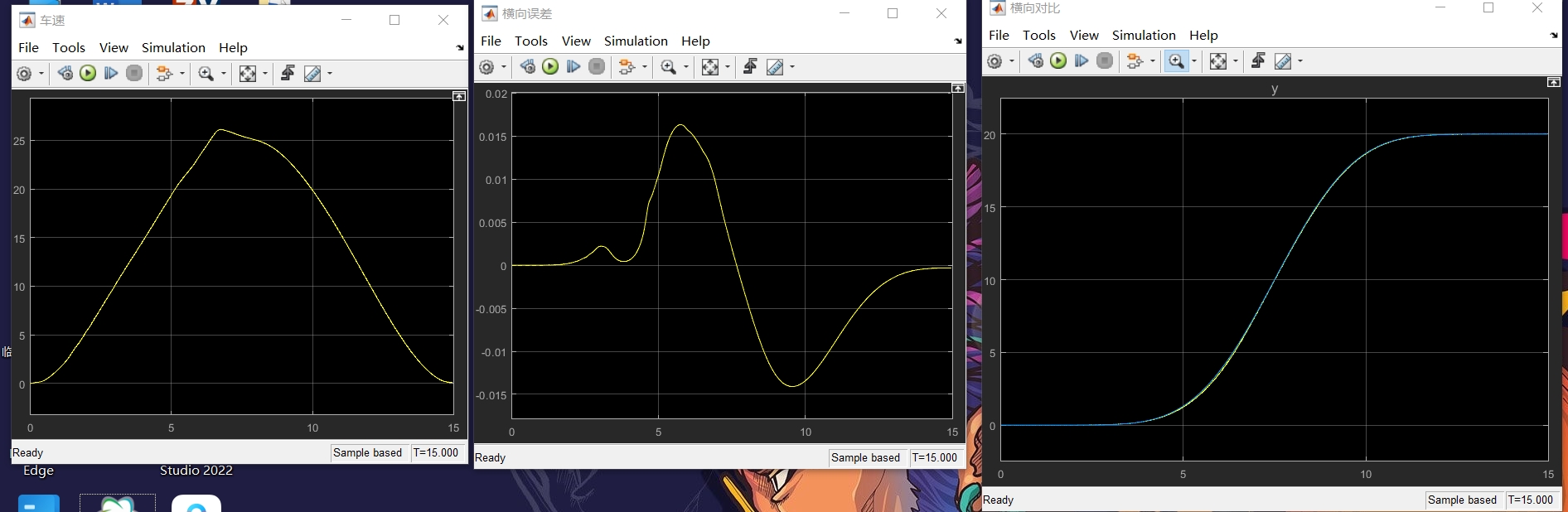
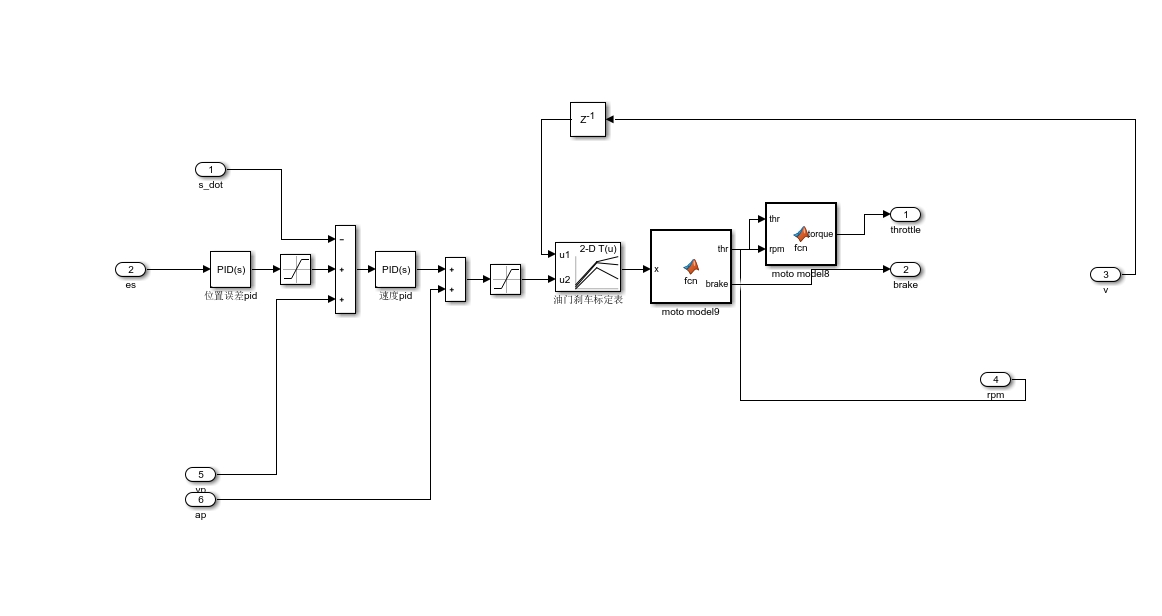
首先,无人驾驶车辆的纵向控制方面,通过使用双PID控制器,能够实现精准的车辆速度控制。PID控制器中的比例、积分和微分三个参数,通过对车辆速度进行实时的反馈和调整,使得车辆能够稳定地行驶在给定的目标速度上。另外,在控制过程中,我们还制作了标定表,并将其保存,这使得车辆在纵向控制时无需自行跑数据来获取电机或发动机的标定数据,极大地提高了操作的便捷性和效率。
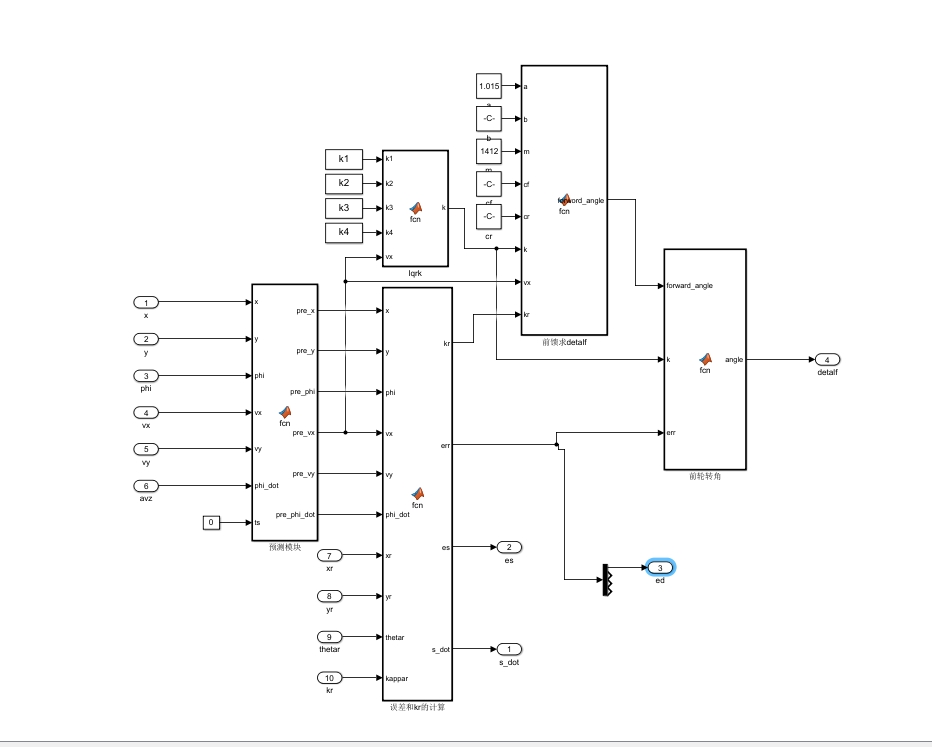
其次,无人驾驶车辆的横向控制方面,采用了LQR控制算法。LQR算法基于系统模型和目标函数,通过最小化系统输出与期望输出之间的偏差来优化控制器参数。与传统的控制方法相比,LQR能够在保证系统稳定性的前提下,最小化控制误差,提高系统的控制性能。在无人驾驶车辆中应用LQR算法,可以实现精准的车辆轨迹跟踪,使得车辆能够准确地按照给定的路径行驶。
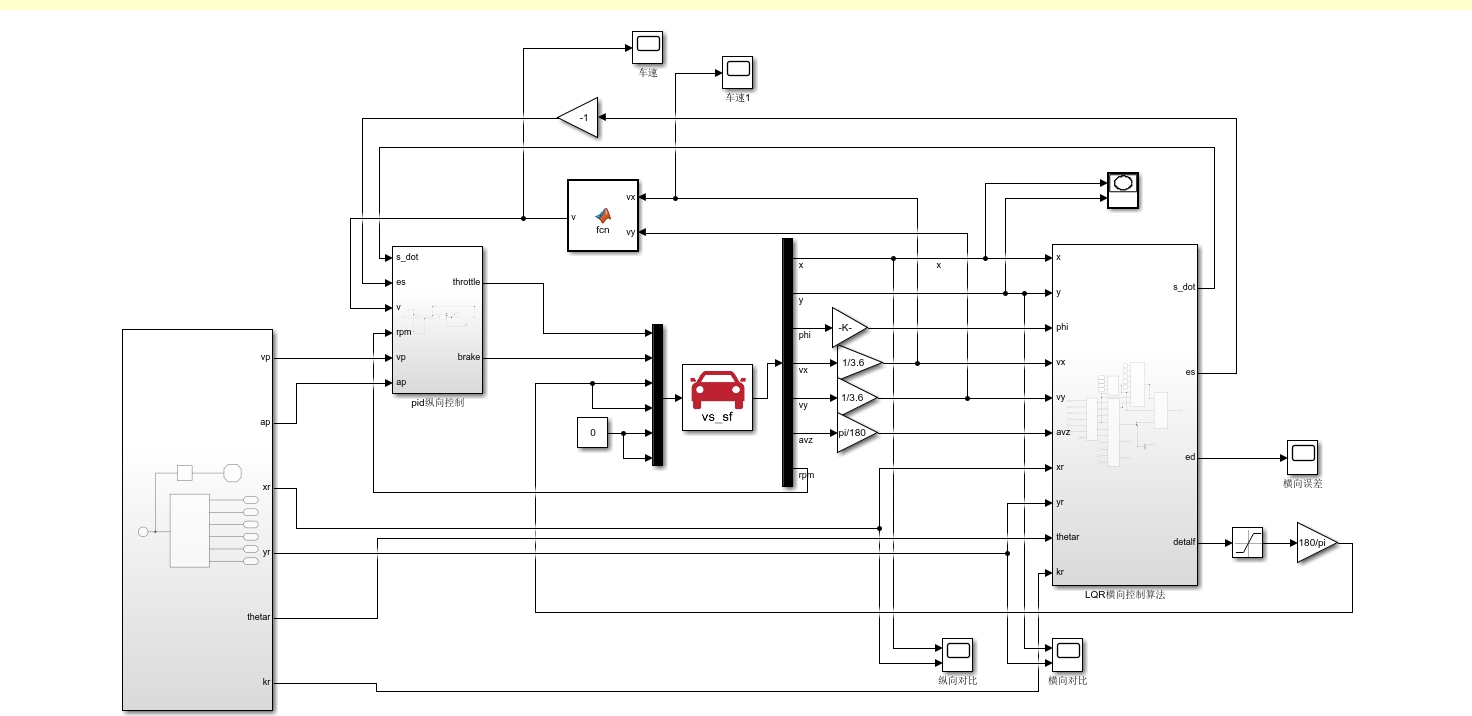
在无人驾驶车辆领域,基于双PID和LQR的纵横向联合控制技术具有以下优势。首先,该技术结合了纵向和横向控制,能够实现全面的车辆控制,提高了车辆的行驶安全性和稳定性。其次,通过使用PID和LQR控制算法,可以根据实际情况进行参数调整,使得车辆的控制更加灵活和可靠。此外,无需自行跑数据获取标定数据的特性,大大减少了操作的复杂度和时间成本。
综上所述,基于双PID和LQR的纵横向联合控制技术在无人驾驶车辆领域具有广泛的应用前景。通过精确的车辆速度控制和轨迹跟踪,该技术能够实现无人驾驶车辆的安全和稳定行驶。未来,我们还可以进一步优化该技术,提高车辆控制的精度和效率,为无人驾驶车辆的商业化应用打下坚实的基础。
注意: 以上文章由AI生成,并未经过人工修改。
【相关代码 程序地址】: http://nodep.cn/680109303164.html















 3499
3499











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









