






一、 相关介绍
1. OpenCV
开源、跨平台的计算机视觉和机器学习软件库。轻量级而且高效,由一系列 C 函数和少量C++类构成,同时提供了Python、Ruby、MATLAB等语言的接口,实现了图像处理和计算机视觉方面的很多通用算法。
2. VINS-Fusion
简介:基于优化的多传感器状态估计器
VINS-Fusion是一款基于优化的多传感器状态估计器,可为自主应用(无人机、汽车和AR/VR)实现精确的自定位。
支持多种视觉惯性传感器类型(单声道摄像头+ IMU,立体摄像头+ IMU,甚至仅立体摄像头),也能支持VINS 与 GPS 融合。特征:
(1)支持多个传感器(立体摄像头/单色摄像头+IMU/立体摄像头+IMU)
(2)在线空间校准(相机和IMU之间的转换)
(3)在线时间校准(相机和IMU之间的时间偏移)
(4)可视闭环
[GitHub - HKUST-Aerial-Robotics/VINS-Fusion: An optimization-based multi-sensor state estimator]
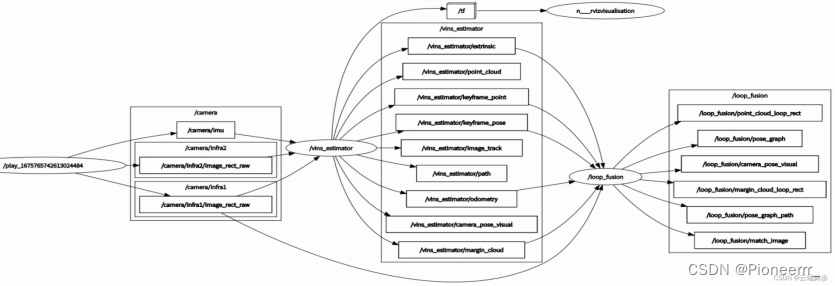 图 VINS Fusion整体框架
图 VINS Fusion整体框架
[Vins-Fusion整体框架,数据流分析_vins fusion代码框架_云端舞步的博客-CSDN博客]
整体框架分为三个节点vins_estimator,loop_fusion,global_fusion。
vins_estimator状态估计,主要完成:1.前端,基于LK光流法的特征点跟踪函数featureTracker、IMU预积分得到当前帧位姿processIMU、三角化得到路标点(特征点位置)trianglate;2.后端优化optimization,滑窗优化位姿,位置此外还会优化零偏、外参、相机与imu时差,滑窗、边缘化slideWindow。3.初始化,完成位姿、位置、零偏初始化计算,也相当于要走一遍优化过程。
loop_fusion主要作用:利用词袋模型进行图像的回环检测。回环检测的任务主要是为了检测机器人是否到达之前相同的位置,并且消累计的误差。
随着路径的不断延伸,机器人在建图过程中会存在一些累计误差,除了利用局部优化、全局优化等来调整之外,还可以利用回环检测来优化位姿。回环检测,又称闭环检测,是指机器人识别曾到达某场景,使得地图闭环的能力。说的简单点,就是机器人在左转一下,右转一下建图的时候能意识到某个地方是“我”曾经来过的,然后把此刻生成的地图与刚刚生成的地图做匹配。
在fusion中,VIO估计完全独立于回环检测的结果。即回环检测的全局估计会受到VIO的影响,但是VIO不受全局估计的影响。
[https://blog.csdn.net/huanghaihui_123/article/details/87357488]
学习资料:
官方论文:[VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator]
前后端详解:[https://mp.weixin.qq.com/s/hoPDnZhT7ltkKib6mqSTcA]
学习笔记:[https://blog.csdn.net/m0_46182398/article/details/136439785]
回环检测:[VINS_Fusion回环检测学习笔记 (xjx100.cn)]
3. 相机内外参数
简介:从相机坐标系转换到像素坐标系中,相机内参的作用;
从世界坐标系转换到相机坐标系中,相机外参的作用。
[一文带你搞懂相机内参外参(Intrinsics & Extrinsics) - 知乎 (zhihu.com)]
对于realsense d435i而言,包含两个红外相机、红外发射器、RGB相机和IMU四个模块。显然四个传感器的空间位置是不同的,我们在处理图像和IMU数据时需要将这些数据都放在统一的坐标系上去。
外参:比如我们用d435i运行vins,我们处理的图像和IMU数据都需要放在同一个坐标系下,因此我们需要标定IMU相对RGB相机的空间位置(包括旋转和位移)。
内参:另外,相机固有参数比如焦距、畸变参数等以及IMU的零偏和scale系数等都需要提前知道。
[realsense d435i标定imu与camera (taodudu.cc)]
相机标定:vins自带的参数估计标定就简单有效。
4. EVO库
EVO库是一个开源库、一个很好的测评工具,它可以根据时间戳将轨迹进行对齐,同时可以将不同尺度的轨迹按照你指定的标准轨迹进行拉伸对齐,并可以算出均方差等评定参数,用于测评slam算法性能。核心功能是能够绘制相机的轨迹,或评估估计轨迹与真值的误差。支持多种数据集的轨迹格式(TUM、KITTI、EuRoC MAV、ROS的bag),同时支持这些数据格式之间进行相互转换。
二、 指令
(根据自己的代码名称修改)
1. roslaunch realsense2_camera rs_camera_vins.launch
//开启相机
2. roslaunch vins vins_rviz.launch·
//开启vins所需的rviz rviz:三维可视化平台
3. rosrun vins vins_node ~/catkin_opencv/src/VINS-Fusion-gpu/config/realsense_ d435i/realsense_stereo_imu_config.yaml
//开启d435i立体相机(结合imu)配置参数下的vins节点
//VINS-Fusion-gpu是具有GPU加速功能的版本,可以在Nvidia TX2上实时运行。
4. rosrun loop_fusion loop_fusion_node ~/catkin_opencv/src/VINS-Fusion-gpu/ config/realsense_d435i/realsense_stereo_imu_config.yaml
//开启回环检测优化
三、理论相关
1. 坐标系(无人机)
1.1 各种环境下的坐标系规定
px4使用的世界、本地坐标系为NED(北东地),机体坐标系为FRD(前右下)。
mavros中常使用的世界、本地坐标系为ENU(东北天),机体坐标系为FLU(前左上)。
Nokov动捕坐标系与mavros相似,常使用的世界、本地坐标系为ENU(东北天),机体坐标系为FLU(前左上)。
题主目前Vins世界、本地坐标系为ENU(东北天),机体右前上。(和imu坐标系方向相关,可能会有不同!)
(世界、本地坐标系为ENU(东北天)与机体坐标系为FLU(前左上)可以看作直接对应的,也即初始状态下是可重合的。)
1.2 是否涉及坐标系转换?
-- mavros方面,一些setpoint等指令,mavros会自动将输入的ENU坐标值或者body系坐标值转换到NED坐标系中,再通过mavlink发送给飞控。mavros的local系坐标原点一般在起飞点。
也即使用set类指令,不必考虑到px4的坐标系转换。
-- vins方面,需要根据vins输出的位置、四元数信息编写处理节点,使其坐标系与ros下一般坐标系统一,便于确认方位与控制设计。
[https://blog.csdn.net/z1872385/article/details/128670710]















 7813
7813











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









