






进一步学习仿真ing,欢迎纠错指点
直接看核心初始化及step函数部分
function setupImpl(obj,~,~,~)
% Perform one-time calculations, such as computing constants
% 初始化函数,只执行一次,重点在于solver求解器的初始化。
import casadi.*
%model params
dt=; %根据实际参数及需求填入数据
m=;
g=;
J=diag([ ]);
l=;
belta=pi/4;
cm=;
ct=;
%control params
Q_p=diag([,,]);
Q_v=diag([,,]);
Q_q=diag([,,]);
Q_Omega=diag([,,]);
Q_u=diag([,,,]);
Omega_max_tilt=;
Omega_max_tor=;
%continous model
x=SX.sym('x',3);
v=SX.sym('v',3);
q=SX.sym('q',4);
Omega=SX.sym('Omega',3);
u=SX.sym('u',4);
X=[x;v;q;Omega];
T=u(1)+u(2)+u(3)+u(4);
G1_bar=[-l*sin(belta) l*sin(belta) l*sin(belta) -l*sin(belta);
l*cos(belta) -l*cos(belta) l*cos(belta) -l*cos(belta);
cm/ct cm/ct -cm/ct -cm/ct];
tao=G1_bar*u;
Omega_dot=J\(-cross(Omega,J*Omega)+tao);
A=[-q(2) -q(3) -q(4);
q(1) -q(4) q(3)
q(4) q(1) -q(2)
-q(3) q(2) q(1)];
q_dot=0.5*A*Omega;
R=[q(1)^2+q(2)^2-q(3)^2-q(4)^2 2*(q(2)*q(3)-q(1)*q(4)) 2*(q(2)*q(4)+q(1)*q(3));
2*(q(2)*q(3)+q(1)*q(4)) q(1)^2-q(2)^2+q(3)^2-q(4)^2 2*(q(3)*q(4)-q(1)*q(2));
2*(q(2)*q(4)-q(1)*q(3)) 2*(q(3)*q(4)+q(1)*q(2)) q(1)^2-q(2)^2-q(3)^2+q(4)^2];
v_dot=[0;0;g]-T/m*R*[0;0;1];
x_dot=v;
X_dot=[x_dot;v_dot;q_dot;Omega_dot];
f=Function('f',{X,u},{X_dot}); % 以上案例意在构建四旋翼连续系统动力学模型,{X,u}输入,{X_dot}输出。
%discrete model
X_now=SX.sym('X_now',13); % x v q Omega:3+3+4+3共13维。当前状态。
u_now=SX.sym('u_now',4); % actuator input % 当前控制输入
k1=f(X_now,u_now);
k2=f(X_now+dt/2*k1,u_now);
k3=f(X_now+dt/2*k2,u_now);
k4=f(X_now+dt*k3,u_now);
X_next=X_now+dt/6*(k1+2*k2+2*k3+k4); % 由四步微分预测下一步状态
F=Function('F',{X_now,u_now},{X_next},{'X_now','u_now'},{'X_next'}); % 以上内容在连续系统的基础上构建离散的动力学模型,{X_now,u_now}输入,{X_next}输出。
% 离散模型形如公式:![]()
%cost fcn & constraints
cost=0;
N=20;
U_N={};%decision variables %初始化为空 % 元胞数组可包含不同格式数据
U0=[];% initial guess
lbU=[];% lower bound % 对状态及控制输入的限制
ubU=[];% upper bound
ineq={};% constraints of NLP % 不等式约束,后边作为casadi求解的参数需求。
lbg = []; % 对四元数及omega的限制
ubg = [];
%add mesured system state X0 in decision variables
X0=SX.sym('X0',13);
U_N={U_N{:},X0}; % 大U_N先填入13维x0,最终U_N为[13维状态,4维当前控制输入,4维下一步控制输入...,4维第N步控制输入]的形式
U0=[U0;zeros(13,1)];
lbU=[lbU;zeros(13,1)];
ubU=[ubU;zeros(13,1)];
Ref=SX.sym('Ref',17,N+1); %期望值为17*(N+1)矩阵 % 此处只是声名,step函数中赋值
Xr=Ref(1:13,:); % 13*(N+1)维
Ur=Ref(14:17,:);
Xk=X0; % xk和Uk是纯的一步状态(13维)和输入控制(4维)
for i=0:N-1
Uk=SX.sym(['U_' num2str(i)],4); ;% 4维第i步控制输入u,待求解
% cost=cost+(Xr_N(:,i+1)-Xk)'*Q_x*(Xr_N(:,i+1)-Xk)+(Ur_N(:,i+1)-Uk)'*Q_u*(Ur_N(:,i+1)-Uk);
q_e=quat_subtract(Xr(7:10,i+1),Xk(7:10)); %(7:10)的数据为4*1的四元数,q_e求四元数差值
% cost函数参考: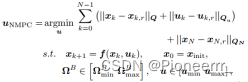
cost=cost+(Xr(1:3,i+1)-Xk(1:3))'*Q_p*(Xr(1:3,i+1)-Xk(1:3))+(Xr(4:6,i+1)-Xk(4:6))'*Q_v*(Xr(4:6,i+1)-Xk(4:6))+q_e(2:4)'*Q_q*q_e(2:4)+(Xr(11:13,i+1)-Xk(11:13))'*Q_Omega*(Xr(11:13,i+1)-Xk(11:13))+(Ur(:,i+1)-Uk)'*Q_u*(Ur(:,i+1)-Uk);
% 此部分cost对应公式前半部分
U_N={U_N{:},Uk};% 动态扩展,将Uk添加至尾部。U_N扩展为[13维状态,4维当前控制输入...,4维第i步控制输入]。
U0=[U0;1.84;1.84;1.84;1.84];
lbU=[lbU;0;0;0;0]; % max_thrust - u_max,此时lbU增至13+4*i维向量。
ubU=[ubU;8.5;8.5;8.5;8.5]; % 同理
ineq={ineq{:},Xk(7)^2+Xk(8)^2+Xk(9)^2+Xk(10)^2,Xk(11),Xk(12),Xk(13)};
lbg=[lbg;1;-Omega_max_tilt;-Omega_max_tilt;-Omega_max_tor];
ubg=[ubg;1;Omega_max_tilt;Omega_max_tilt;Omega_max_tor];
% 以上三句:将姿态表示限制为单位四元数,对角速度上下限进行限制
% 数组扩展变化同理
Xk1=F('X_now',Xk,'u_now',Uk); % 由F求解下一个状态
Xk=Xk1.X_next; % 更新状态
end
% 循环后U_N成为[13维状态,4维当前控制输入,4维下一步控制输入...,4维第N步控制输入]形式,后续lbg、ubg同理。
q_e=quat_subtract(Xr(7:10,end),Xk(7:10));
cost=cost+(Xr(1:3,end)-Xk(1:3))'*Q_p*(Xr(1:3,end)-Xk(1:3))+(Xr(4:6,end)-Xk(4:6))'*Q_v*(Xr(4:6,end)-Xk(4:6))+q_e(2:4)'*Q_q*q_e(2:4)+(Xr(11:13,end)-Xk(11:13))'*Q_Omega*(Xr(11:13,end)-Xk(11:13));
% end为最后一次,对应公式后半部分
ineq={ineq{:},Xk(7)^2+Xk(8)^2+Xk(9)^2+Xk(10)^2,Xk(11),Xk(12),Xk(13)};
lbg=[lbg;1;-Omega_max_tilt;-Omega_max_tilt;-Omega_max_tor];
ubg=[ubg;1;Omega_max_tilt;Omega_max_tilt;Omega_max_tor];
%create solver %下文仅创建求解器,未求解
prob=struct('f',cost,'x',vertcat(U_N{:}),'g',vertcat(ineq{:}),'p',Ref);
solver = nlpsol('solver', 'ipopt', prob);
% vertcat(U_N{:})使得求解结果x为13+4*N?维垂直向量形式
obj.mpc_solver=solver;
obj.x0=U0; % 初始值
obj.lbx=lbU;
obj.ubx=ubU;
obj.lbg=lbg;
obj.ubg=ubg;

参考自 用casadi求解求解具有线性约束的二次规划 - 知乎 (zhihu.com)
end
function u = stepImpl(obj,Xr_N,Ur_N,X_in)
% Implement algorithm. Calculate y as a function of input u and
% discrete states.
w0=obj.x0;
lbw=obj.lbx;
ubw=obj.ubx;
solver=obj.mpc_solver;
lbw(1:13)=X_in; %substitute mesured state into the solver
ubw(1:13)=X_in;
% 以上两句话以边界约束的形式将此刻状态X_in传入求解函数,也即求解结果x的前13维其实是输入的当前状态
Ref=zeros(17,21);
Ref(1:13,:)=Xr_N; % 期望状态为矩阵,也即连续轨迹
Ref(14:17,:)=Ur_N;
sol = solver('x0', w0, 'lbx', lbw, 'ubx', ubw,...
'lbg', obj.lbg, 'ubg', obj.ubg, 'p', Ref);
u = full(sol.x(14:17)); % 结果的14-17项即为所需控制输入u
end
function resetImpl(~)
% Initialize / reset discrete-state properties
end
end
end















 1718
1718











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









