






EXTI 寄存器
用到外部中断来唤醒睡眠模式。我们用到 WFI 指令(参考 29.1.3 电源管理对这
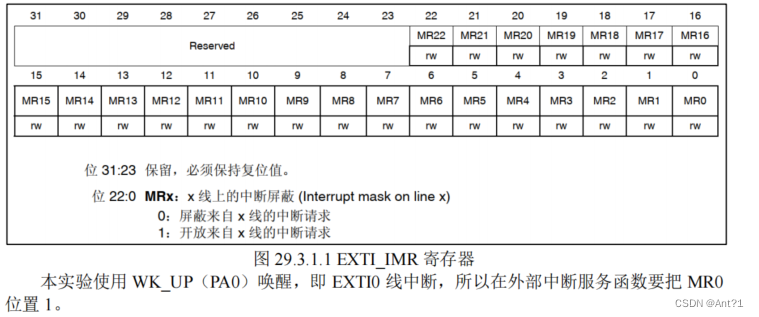
个指令的讲解)进入睡眠模式,进入睡眠模式后,使用外部中断唤醒。进入外部中断后,EXTI_IMR 寄存器的值会自动清零,我们需要对对应的外部中断线位置 1,取消屏
蔽,相当于其他中断的中断标志位进入中断后硬件自动置 1,需要手动清零
EXTI中断屏蔽寄存器
EXTI 上升沿触发选择寄存器(EXTI_RTSR)
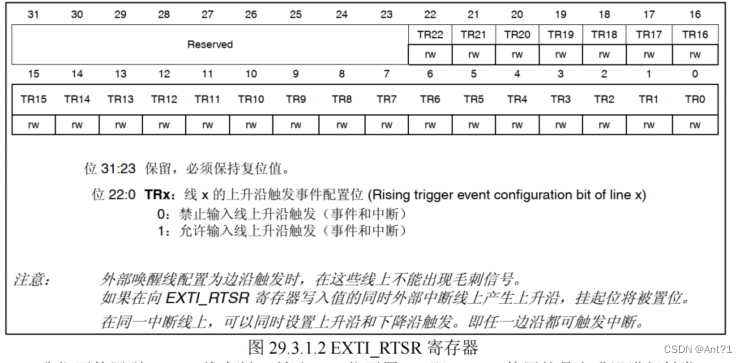
我们要使用到 EXTI0 线中断,所以 TR0 位要置 1,即 EXTI0 使用的是上升沿进行触发。
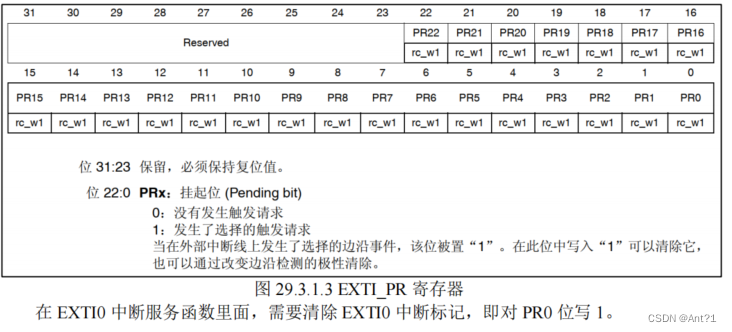
EXTI 挂起寄存器(EXTI_PR)
代码
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file gpio.c
* @brief This file provides code for the configuration
* of all used GPIO pins.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "gpio.h"
void MX_GPIO_Init(void)
{
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOF_CLK_ENABLE();
GPIO_InitTypeDef gpio_init_structer;
gpio_init_structer.Pin = GPIO_PIN_0;
gpio_init_structer.Mode = GPIO_MODE_IT_RISING;
gpio_init_structer.Pull = GPIO_PULLDOWN;
HAL_GPIO_Init(GPIOA,&gpio_init_structer);
HAL_NVIC_SetPriority(EXTI0_IRQn,2,0);
HAL_NVIC_EnableIRQ(EXTI0_IRQn);
gpio_init_structer.Pin = GPIO_PIN_0;
gpio_init_structer.Mode = GPIO_MODE_OUTPUT_PP;
gpio_init_structer.Pull = GPIO_PULLUP;
gpio_init_structer.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
HAL_GPIO_Init(GPIOC,&gpio_init_structer);
gpio_init_structer.Pin = GPIO_PIN_10;
gpio_init_structer.Mode = GPIO_MODE_OUTPUT_PP;
gpio_init_structer.Pull = GPIO_PULLUP;
gpio_init_structer.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
HAL_GPIO_Init(GPIOF,&gpio_init_structer);
}
/**
* @brief WK_UP按键 外部中断服务程序
* @param 无
* @retval 无
*/
void EXTI0_IRQHandler(void)
{
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_0);
}
/**
* @brief 外部中断回调函数
* @param GPIO_Pin:中断线引脚
* @note 此函数会被PWR_WKUP_INT_IRQHandler()调用
* @retval 无
*/
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_Pin==GPIO_PIN_0)
{
/* HAL_GPIO_EXTI_IRQHandler()函数已经为我们清除了中断标志位,所以我们进了回调函数可以不做任何事 */
}
}
void key_init(void)
{
GPIO_InitTypeDef gpio_init_struct;
KEY0_GPIO_CLK_ENABLE(); /* KEY0时钟使能 */
KEY1_GPIO_CLK_ENABLE(); /* KEY1时钟使能 */
KEY2_GPIO_CLK_ENABLE(); /* KEY2时钟使能 */
gpio_init_struct.Pin = KEY0_GPIO_PIN; /* KEY0引脚 */
gpio_init_struct.Mode = GPIO_MODE_INPUT; /* 输入 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
HAL_GPIO_Init(KEY0_GPIO_PORT, &gpio_init_struct); /* KEY0引脚模式设置,上拉输入 */
gpio_init_struct.Pin = KEY1_GPIO_PIN; /* KEY1引脚 */
gpio_init_struct.Mode = GPIO_MODE_INPUT; /* 输入 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
HAL_GPIO_Init(KEY1_GPIO_PORT, &gpio_init_struct); /* KEY1引脚模式设置,上拉输入 */
gpio_init_struct.Pin = KEY2_GPIO_PIN; /* KEY2引脚 */
gpio_init_struct.Mode = GPIO_MODE_INPUT; /* 输入 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
HAL_GPIO_Init(KEY2_GPIO_PORT, &gpio_init_struct); /* KEY2引脚模式设置,上拉输入 */
}
/**
* @brief 按键扫描函数
* @note 该函数有响应优先级(同时按下多个按键): WK_UP > KEY2 > KEY1 > KEY0!!
* @param mode:0 / 1, 具体含义如下:
* @arg 0, 不支持连续按(当按键按下不放时, 只有第一次调用会返回键值,
* 必须松开以后, 再次按下才会返回其他键值)
* @arg 1, 支持连续按(当按键按下不放时, 每次调用该函数都会返回键值)
* @retval 键值, 定义如下:
* KEY0_PRES, 1, KEY0按下
* KEY1_PRES, 2, KEY1按下
* KEY2_PRES, 3, KEY2按下
* WKUP_PRES, 4, WKUP按下
*/
//mode=1 按键连按时 每次按键扫描进来 key_up = 1故支持连按
//mode0 按键连按没用key_up=0 只有当按键回弹时 key_up = 1;
uint8_t key_scan(uint8_t mode)
{
static uint8_t key_up = 1; /* 按键按松开标志 *///static 修饰的变量只被初始化一次
uint8_t keyval = 0;
if (mode) key_up = 1; /* 支持连按 */
if (key_up && (KEY0 == 0 || KEY1 == 0 || KEY2 == 0 )) /* 按键松开标志为1, 且有任意一个按键按下了 */
{
HAL_Delay(10); /* 去抖动 */
key_up = 0;
if (KEY0 == 0) keyval = KEY0_PRES;
if (KEY1 == 0) keyval = KEY1_PRES;
if (KEY2 == 0) keyval = KEY2_PRES;
// if (WK_UP == 1) keyval = WKUP_PRES;
}
else if (KEY0 == 1 && KEY1 == 1 && KEY2 == 1 ) /* 没有任何按键按下, 标记按键松开 */
{
key_up = 1;
}
return keyval; /* 返回键值 */
}
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file gpio.c
* @brief This file provides code for the configuration
* of all used GPIO pins.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "pwr.h"
#include "usart.h"
#include "stdio.h"
void pwr_enter_sleep(void)
{
HAL_SuspendTick();/* 暂停滴答时钟,防止通过滴答时钟中断唤醒 */
HAL_PWR_EnterSLEEPMode(PWR_MAINREGULATOR_ON,PWR_SLEEPENTRY_WFI);/* 执行WFI指令, 进入待机模式 */
}
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "gpio.h"
#include "stdio.h"
#include "usart.h"
#include "pwr.h"
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
uint8_t key,t=0;
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
MX_GPIO_Init();
key_init();
usart_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
printf("demo!!!\r\n");
while (1)
{
key = key_scan(0);
if(key==KEY0_PRES)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_0,GPIO_PIN_RESET);
pwr_enter_sleep();
HAL_ResumeTick();
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_0,GPIO_PIN_SET);
}
HAL_Delay(10);
if(t%20==0)
{
HAL_GPIO_TogglePin(GPIOF,GPIO_PIN_10);
}
HAL_Delay(10);
t++;
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 25;
RCC_OscInitStruct.PLL.PLLN = 336;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */















 4713
4713











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









