







现推出专栏项目:从图像处理(去雾/去雨)/目标检测/目标跟踪/单目测距/到人体姿态识别等视觉感知项目
--------------------更多视觉和自动驾驶项目请见--------------------------->>>>>>:
新手小白编程的Python人工智能之路_阿利同学的博客-CSDN博客
# YOLOv4-DeepSort
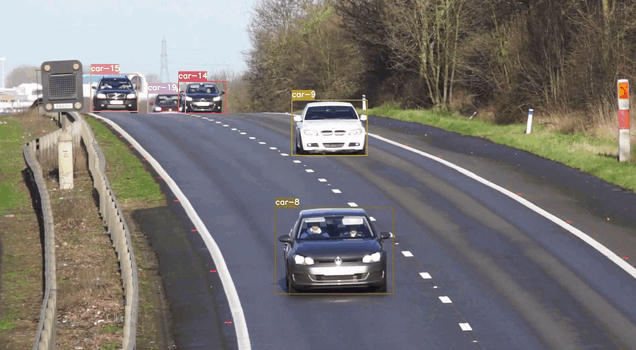
本项目基于 YOLOv4 和 DeepSORT 实现了目标检测和跟踪,可以用于实现视频中的目标检测和跟踪。

添加图片注释,不超过 140 字(可选)
## 功能
- 视频目标检测和跟踪:该项目可以读取本地或者云端的视频文件,对视频帧中的目标进行检测和跟踪,并且可以将跟踪结果保存为视频文件或者输出为实时视频流。
- 目标检测和跟踪参数的调整:该项目提供了一些参数可以调整,包括目标检测的置信度阈值、目标跟踪的匹配阈值、卡尔曼滤波器的参数等等,用户可以根据实际场景进行调整。
**- 相机标定:**该项目还提供了相机标定的工具,可以对相机进行标定,以提高目标检测和跟踪的精度。
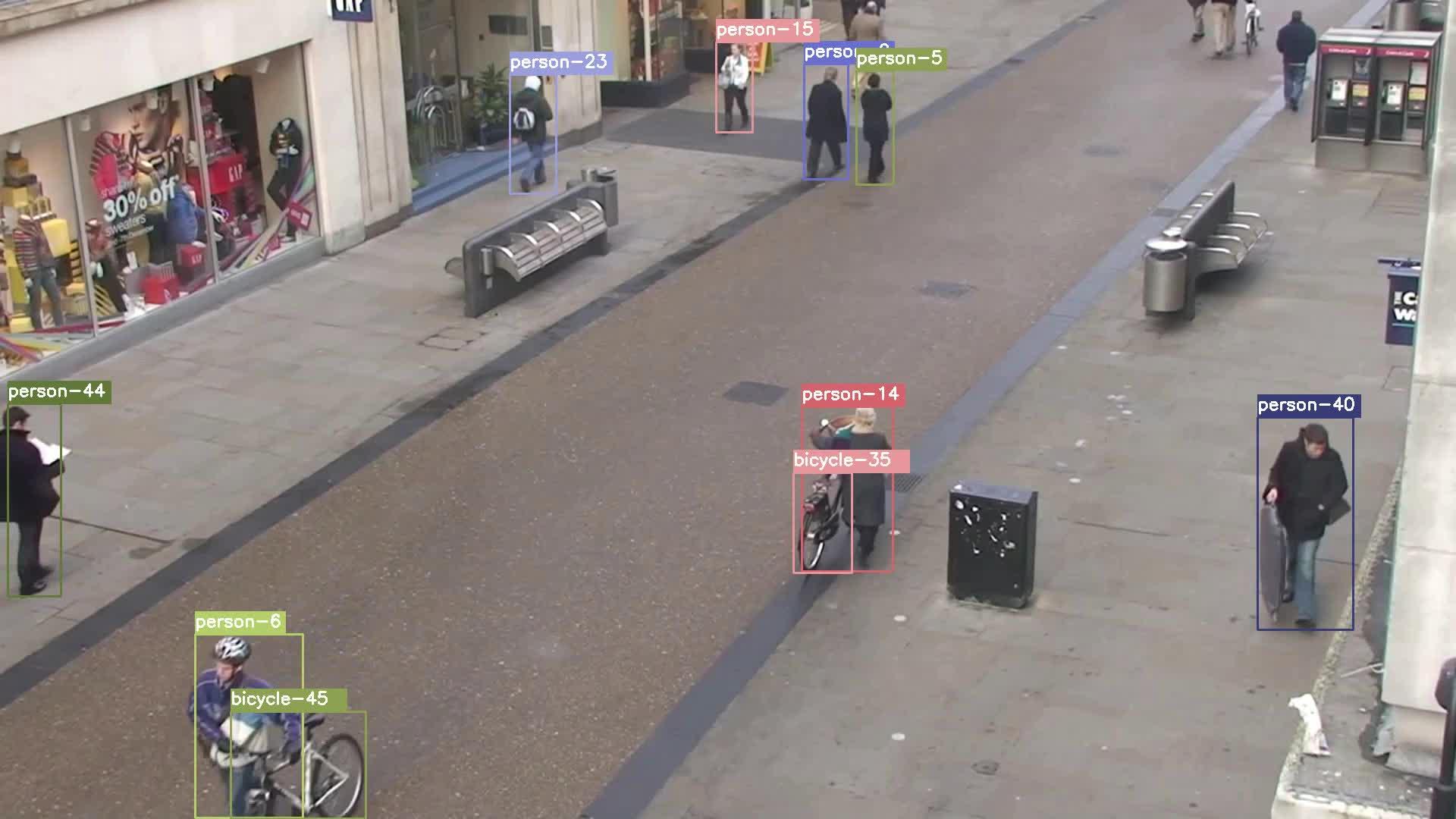
**- 多目标跟踪:**该项目支持同时跟踪多个目标,可以通过目标 ID 进行区分和跟踪。
## 依赖项
- Python 3.x
- TensorFlow 2.x
- OpenCV 4.x
- NumPy
- SciPy
- Matplotlib
## 安装
\1. 克隆本项目:
git clone my_project.git 或者联系我获取压缩包----------
\2. 安装依赖项:
pip install -r requirements.txt
\3. 下载 YOLOv4 权重文件:
- 从 YOLOv4 官方仓库
下载 **yolov4.weights** 文件。
- 将 yolov4.weights 文件保存在 data 目录下。
添加图片注释,不超过 140 字(可选)
## 代码复现
\1. 运行 object_tracker.py 文件:
python object_tracker.py --video ./data/video/test.mp4 --output ./outputs/output.avi
- --video 参数指定要处理的视频文件路径。
- --output 参数指定要保存的输出视频文件路径。如果不指定该参数,则会将跟踪结果输出为实时视频流。
\2. 运行相机标定工具:
python tools/camera_calibration.py
该工具会自动读取 data/camera_calib/sample.mp4 视频文件,并进行相机标定。标定结果会保存在 data/camera_calib/calib.txt 文件中。
上传视频封面
好的标题可以获得更多的推荐及关注者
## 参数调整
可以通过修改 object_tracker.py 文件中的一些参数来调整目标检测和跟踪的效果。
- 目标检测置信度阈值:confidence_threshold 参数,默认值为 0.5。
- 目标跟踪匹配阈值:max_iou_distance 参数,默认值为 0.7。
- 卡尔曼滤波器参数:kalman_filter 类中的 Q 和 R 矩阵。可以根据实际场景进行调整。
#代码获取和结果
def save_tf():#------联系---->qq1309399183<----
STRIDES, ANCHORS, NUM_CLASS, XYSCALE = utils.load_config(FLAGS)
input_layer = tf.keras.layers.Input([FLAGS.input_size, FLAGS.input_size, 3])
feature_maps = YOLO(input_layer, NUM_CLASS, FLAGS.model, FLAGS.tiny)
bbox_tensors = []
prob_tensors = []
if FLAGS.tiny:
for i, fm in enumerate(feature_maps):
if i == 0:
output_tensors = decode(fm, FLAGS.input_size // 16, NUM_CLASS, STRIDES, ANCHORS, i, XYSCALE, FLAGS.framework)
else:
output_tensors = decode(fm, FLAGS.input_size // 32, NUM_CLASS, STRIDES, ANCHORS, i, XYSCALE, FLAGS.framework)
bbox_tensors.append(output_tensors[0])
prob_tensors.append(output_tensors[1])
else:
for i, fm in enumerate(feature_maps):
if i == 0:
output_tensors = decode(fm, FLAGS.input_size // 8, NUM_CLASS, STRIDES, ANCHORS, i, XYSCALE, FLAGS.framework)
elif i == 1:
output_tensors = decode(fm, FLAGS.input_size // 16, NUM_CLASS, STRIDES, ANCHORS, i, XYSCALE, FLAGS.framework)
else:
output_tensors = decode(fm, FLAGS.input_size // 32, NUM_CLASS, STRIDES, ANCHORS, i, XYSCALE, FLAGS.framework)
bbox_tensors.append(output_tensors[0])
prob_tensors.append(output_tensors[1])
pred_bbox = tf.concat(bbox_tensors, axis=1)
pred_prob = tf.concat(prob_tensors, axis=1)
if FLAGS.framework == 'tflite':
pred = (pred_bbox, pred_prob)
else:
boxes, pred_conf = filter_boxes(pred_bbox, pred_prob, score_threshold=FLAGS.score_thres, input_shape=tf.constant([FLAGS.input_size, FLAGS.input_size]))
pred = tf.concat([boxes, pred_conf], axis=-1)
model = tf.keras.Model(input_layer, pred)
utils.load_weights(model, FLAGS.weights, FLAGS.model, FLAGS.tiny)
model.summary()
model.save(FLAGS.output)
def main(_argv):
save_tf()

S.model, FLAGS.tiny)
model.summary()
model.save(FLAGS.output)
def main(_argv):
save_tf()
[外链图片转存中...(img-a4j2etht-1730724428159)]
添加图片注释,不超过 140 字(可选)

















 2613
2613

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









