







YOLOBird简介
欢迎来到 YOLOBirdDetect 仓库。
在这个仓库中,你将找到三个重要的 Python 文件:Training、Validation 和 Testing。每个文件都执行不同的任务,就像它们的名字所暗示的那样:
- Training:该文件负责使用一个小型自定义数据集来训练我们的模型。
- Validation:在这里,我们检查模型在未见过的数据上表现如何,确保它的效果良好。
- Testing:最后,我们通过测试模型来查看它在新图像中检测鸟类的准确性。
这个仓库旨在通过基于 YOLO(You Only Look Once)目标检测算法的模型,检测图像中的鸟类。YOLO 是一种高效的卷积神经网络(CNN),被广泛应用于实时目标检测,尤其在物体识别和分类任务中表现突出。通过该项目,用户可以训练自己的模型,评估其性能,并通过实际数据测试其效果。
1. Training:模型训练
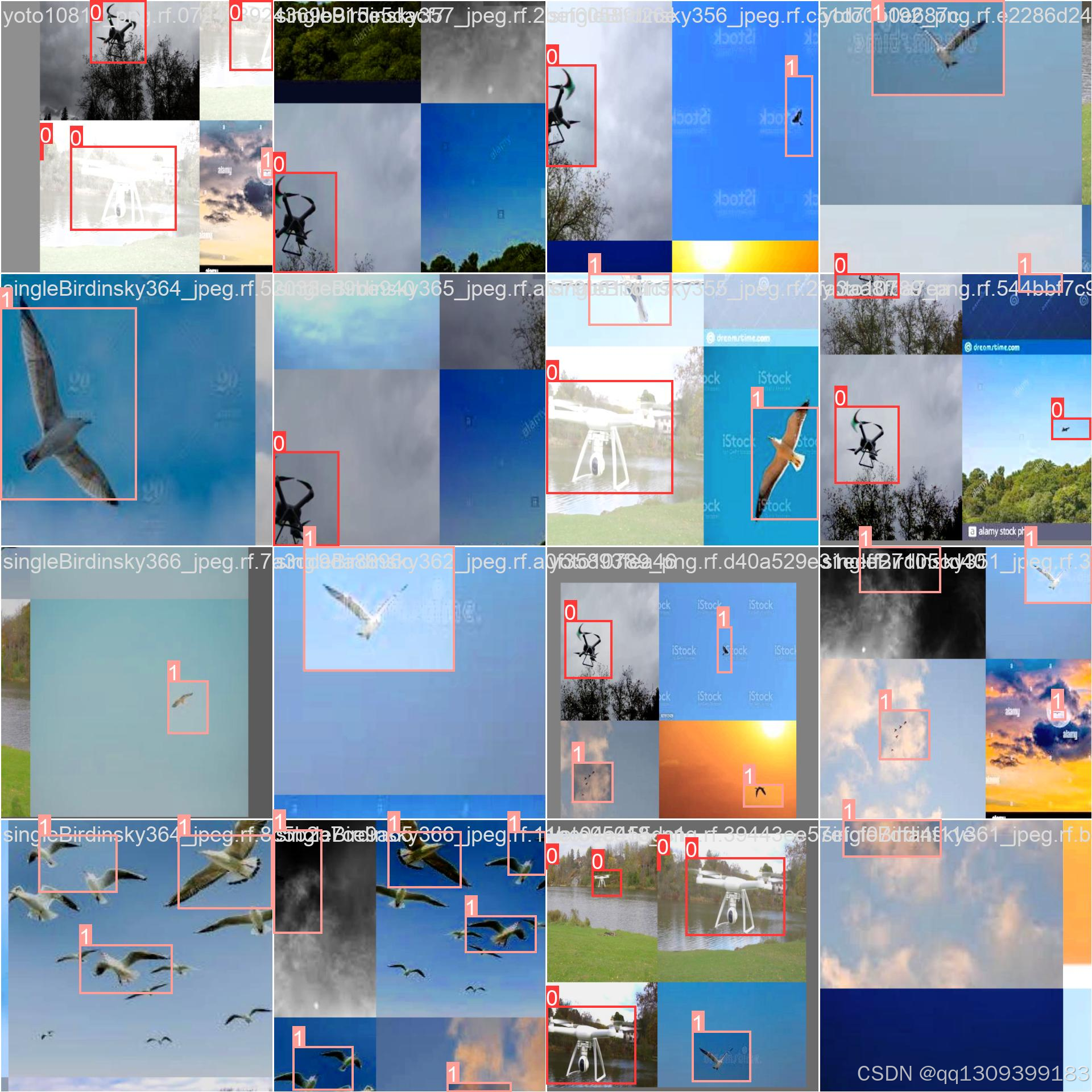
在 Training 文件中,我们首先准备训练数据集,通常包括一系列图像以及这些图像中鸟类的标注信息(如鸟类的位置、大小和类别)。我们使用这些图像来训练 YOLO 模型,使其学会如何在不同的环境中识别鸟类。
训练过程一般包括以下几个步骤:
- 数据预处理:将图像调整为适合模型输入的格式,并将标注信息转换为模型可以理解的标签格式(例如,YOLO 格式的边界框坐标)。
- 选择模型架构:YOLO 具有不同的版本(如 YOLOv3、YOLOv4 等),每个版本在不同的计算资源和精度要求下表现不同。我们可以根据具体的硬件配置和任务需求选择最适合的版本。
- 训练过程:使用训练数据集来优化模型的参数,使其能够在新图像中更好地识别鸟类。训练过程中,模型会逐渐调整其内部权重,直到能够达到较高的准确率。
训练过程可能需要大量的计算资源和时间,特别是在使用大型数据集时。因此,为了加速训练,通常会使用GPU加速。
2. Validation:验证模型性能
在 Validation 文件中,我们将模型应用到一个与训练集不同的验证数据集上。验证集包含一些模型在训练过程中未见过的图像,因此可以用来评估模型的泛化能力。
验证的目标是:
- 评估模型准确性:通过计算精度(precision)、召回率(recall)、F1 分数等指标,评估模型在处理新数据时的表现。
- 防止过拟合:如果模型在训练数据集上表现良好,但在验证集上效果较差,可能是模型出现了过拟合。这意味着它在训练数据上学习到了太多的细节和噪音,而无法很好地推广到新数据上。通过验证集,我们可以及时发现这种问题并采取措施,如调整模型架构、引入正则化技术或使用更多的训练数据。
验证的另一个重要任务是调整超参数,如学习率、批量大小等。通过交叉验证等方法,可以进一步优化模型性能。
3. Testing:测试模型
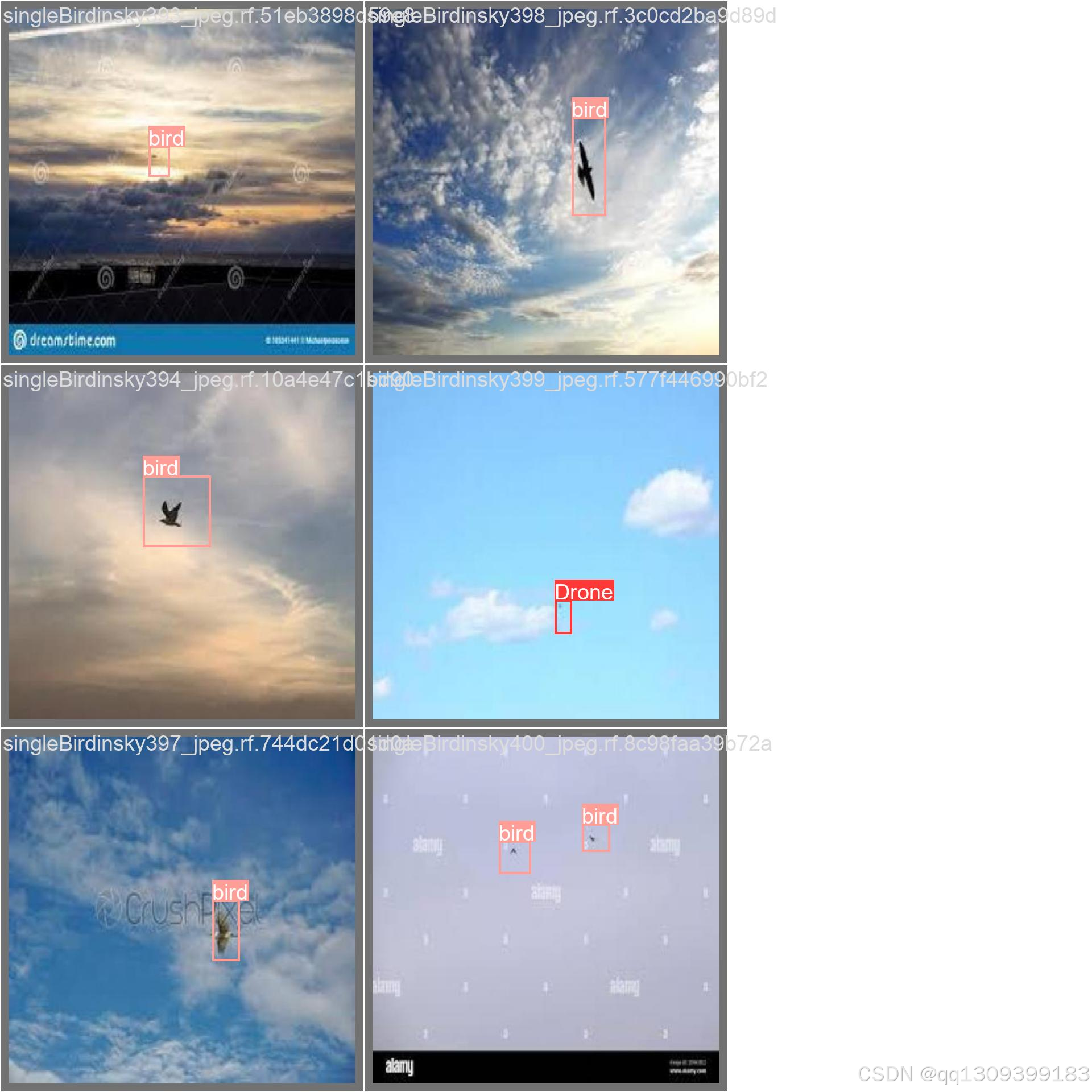
在 Testing 文件中,我们对经过训练和验证的模型进行最终测试。这一步的目的是验证模型在完全未知的新图像上的表现。测试集通常是与训练集和验证集独立的,它包含一组新的图像,可以帮助我们了解模型在实际应用中的效果。
测试阶段的重点是:
- 检测准确率:计算模型在新图像上检测鸟类的准确度。这包括确定模型是否能够成功地识别图像中的鸟类,并且能够正确地标记其位置。
- 性能评估:测试过程中,我们还会考虑模型的推理速度、处理时间等性能指标。特别是在实时监控或大规模图像分析的应用场景中,模型的速度可能比其精度更为重要。
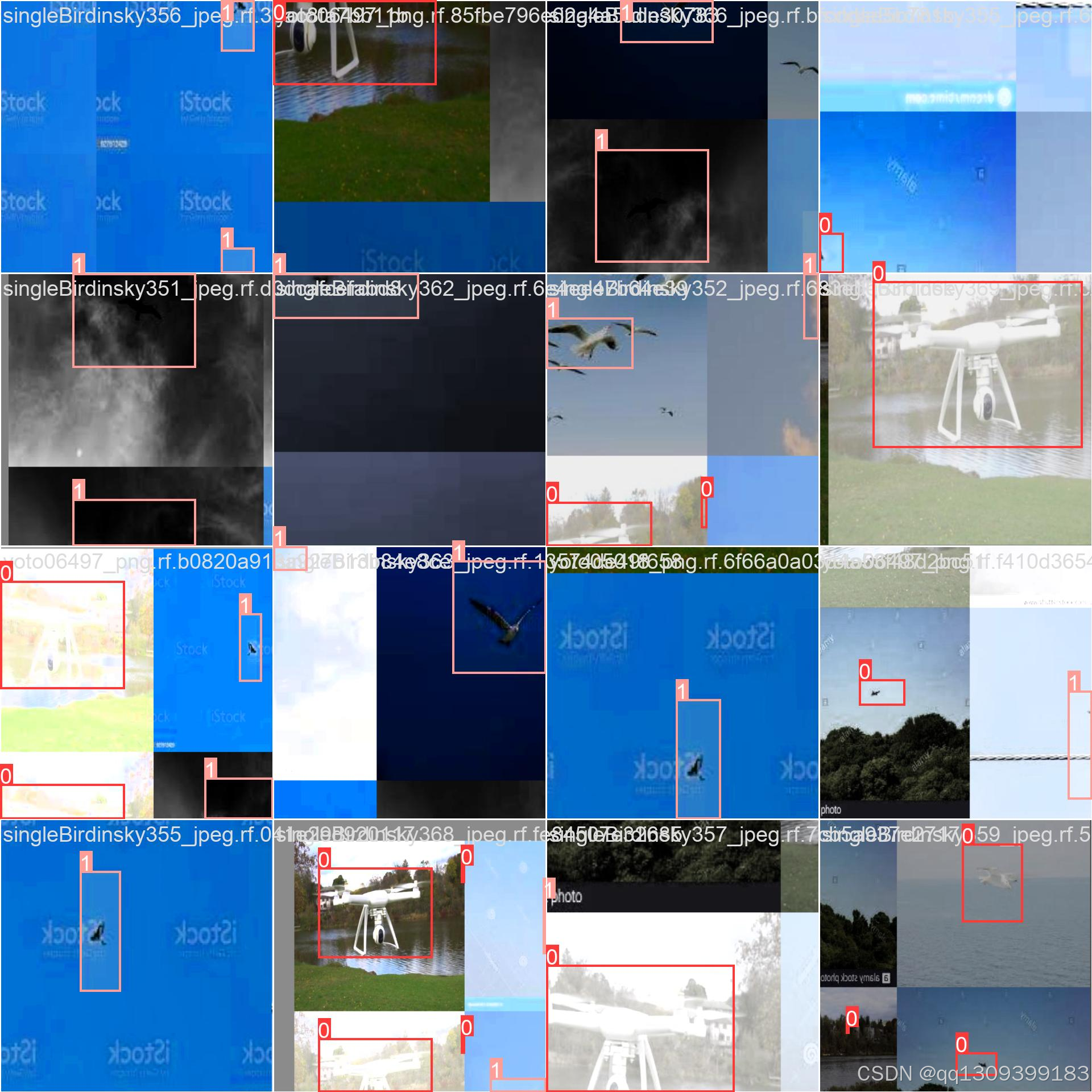
- 实际应用验证:通过测试不同环境下的图像(如不同光照条件、背景复杂度、鸟类种类等),评估模型的鲁棒性。这对于确保模型在实际场景中的应用至关重要。
此外,测试结果还可以帮助我们识别模型的局限性。例如,模型可能在某些特定类型的图像中表现较差,可能是因为这些图像在训练过程中没有得到足够的代表性。根据测试结果,我们可以进一步优化数据集或模型。
项目扩展与应用
YOLOBirdDetect 项目不仅仅局限于鸟类检测,还可以根据需求扩展到其他目标检测任务。由于 YOLO 算法的高效性,它可以在实时场景中进行目标检测,非常适用于安防监控、交通流量监测、环境保护等多个领域。
例如,如果你想将 YOLOBirdDetect 应用于安防领域,可以将数据集更换为人、车辆等目标的图像,并调整模型参数来适应新的检测任务。YOLO 在许多不同的物体检测任务中都能表现出色,且在性能和速度之间取得了良好的平衡。
未来的改进方向
尽管 YOLOBirdDetect 已经能够在训练数据集上检测鸟类,但在一些实际应用中仍然有改进的空间。例如:
- 数据增强:通过对训练图像进行旋转、缩放、裁剪等操作,增加数据的多样性,从而提高模型的鲁棒性。
- 迁移学习:使用预训练模型(例如,使用在大规模数据集上预训练的 YOLO 模型)来加速训练过程,减少对大量标注数据的需求。
- 多任务学习:除了检测鸟类的位置,模型还可以同时进行鸟类种类的分类,提供更多有价值的信息。
通过不断地优化和扩展,YOLOBirdDetect 有望成为一个强大的工具,广泛应用于物体检测和目标识别领域。
结语
YOLOBirdDetect 项目通过 YOLO 模型实现鸟类检测,展示了深度学习在图像分析和物体识别中的强大能力。通过训练、验证和测试这三个步骤,用户可以有效地评估模型的性能,并针对实际应用进行优化。随着技术的不断发展,未来这一工具还可以进一步扩展,应用于更多的领域,发挥更大的作用。


















 576
576

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









