







基于Unet网络的无人机全景图的耕地提取模型
Unet模型适合特征少,需要浅层特征的全景农田数据集
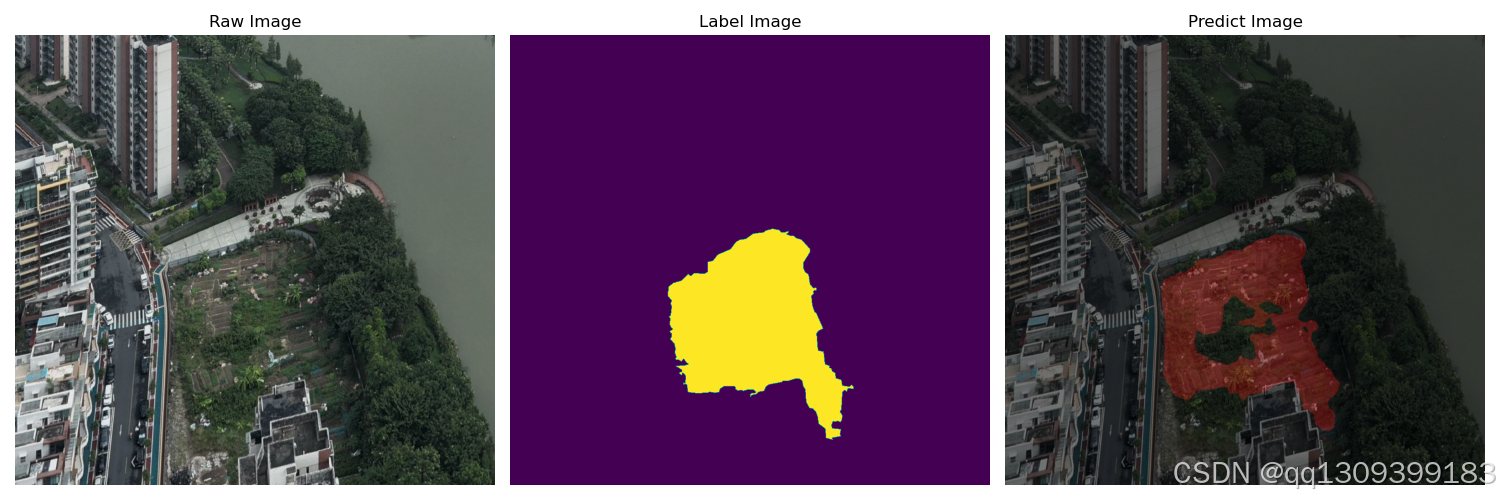
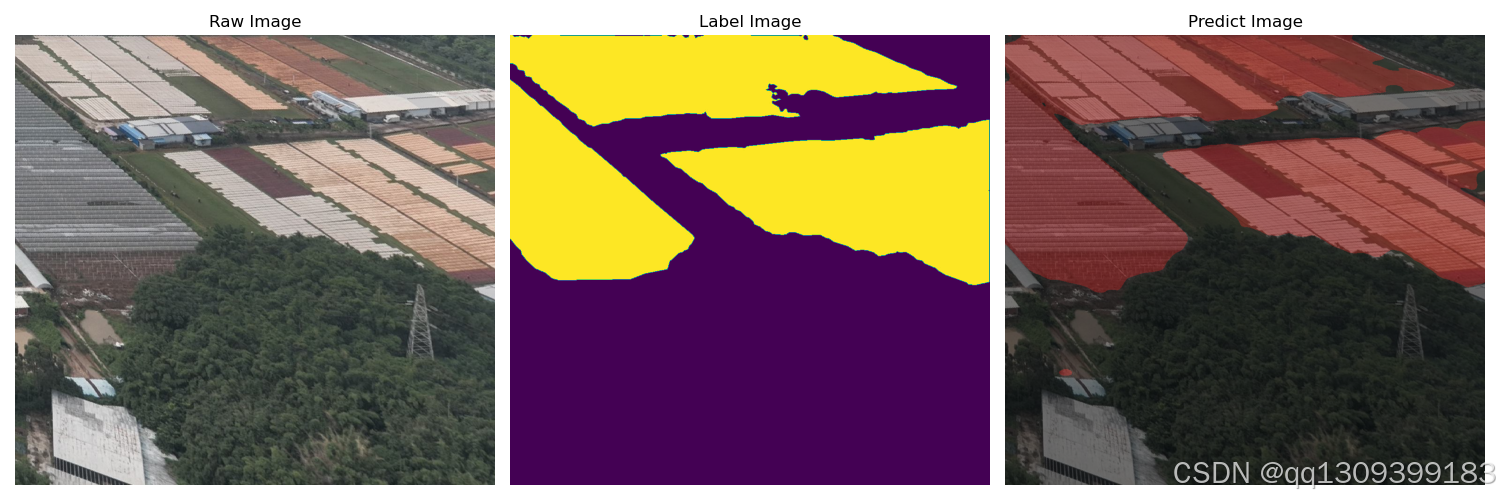
针对RGB的高明区无人机全景图的浅层特征数据集,利用Unet模型架构的优势提取影像的耕地目标,解决了复杂场景下的目标提取。
图片1
图片2
权重文件下载
训练所需的权值可在百度网盘中下载,下载后放到model。
链接: https://pan.baidu.com/s/1A22fC5cPRb74gqrpq7O9-A

主要步骤
- 将存放全景图像的panorama文件夹下所有全景图切割并提取主要绿地作为农田图像;
训练前将图片文件放在Datasets文件夹下的JPEGImages中; - 训练前将标签文件放在Datasets文件夹下的SegmentationClass中;
- 在训练前利用annotation.py文件生成对应的txt;
- 修改train.py的num_classes为分类个数+1,这里只有农田类别,因此该参数设置为1;
- 运行train.py即可开始训练;
修改unet.py中的model_path和num_classes,打开predicet.py根据测试模型更改参数,进行预测测试


















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









