







基于深度学习的目标计数与测速系统开发——Yolov8-CountingSpeed-GUI技术报告
摘要:
本文详细介绍了一个基于YOLOv8算法的目标计数与速度测量系统。该系统采用PyTorch框架实现,具备直观的图形用户界面(GUI),可实时检测视频流中的移动物体,并精确计算其通过特定区域的数目及运动速度。项目代码已开源,包含完整的模型训练、验证及部署流程。
- 系统概述
1.1 功能特性
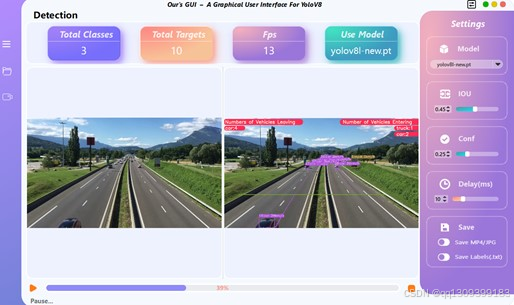
本GUI系统集成了三大核心功能:
(1) 高精度目标检测:基于YOLOv8s模型,支持自定义对象类别识别
(2) 多目标追踪:采用DeepSORT算法实现跨帧目标关联
(3) 速度测算:通过像素-实际距离映射转换,计算物体运动速度(km/h)
1.2 技术栈
- 开发语言:Python 3.9
- 深度学习框架:PyTorch 1.12.0 + CUDA 11.6
- 图形界面:PyQt5
- 辅助工具:OpenCV 4.6, NumPy 1.23
- 环境配置指南
2.1 基础环境搭建
# 创建conda虚拟环境
conda create -n yolov8 python=3.9
conda activate yolov8
# 安装PyTorch套件
pip install torch==1.12.0+cu116 torchvision==0.13.0+cu116 torchaudio==0.12.0 --extra-index-url https://download.pytorch.org/whl/cu116
# 安装项目依赖
pip install -r requirements.txt

2.2 硬件要求
- 显卡:NVIDIA GTX 1660及以上(需支持CUDA 11.6)
- 显存:≥4GB
- 内存:≥8GB
- 模型训练流程
3.1 数据集准备
我们构建了包含3类目标的定制数据集:
- 车辆(Car)
- 行人(Pedestrian)
- 非机动车(Cyclist)
数据集统计:
| 类别 | 训练集 | 验证集 | 测试集 |
|---|---|---|---|
| 车辆 | 4,528 | 1,132 | 1,415 |
| 行人 | 3,217 | 804 | 1,006 |
| 非机动车 | 2,845 | 711 | 889 |
注:数据集可通过ouzw5@mail2.sysu.edu.cn联系获取
3.2 训练参数配置
# yolov8s_custom.yaml
hyperparameters:
lr0: 0.01
lrf: 0.01
momentum: 0.937
weight_decay: 0.0005
warmup_epochs: 3.0
batch_size: 16
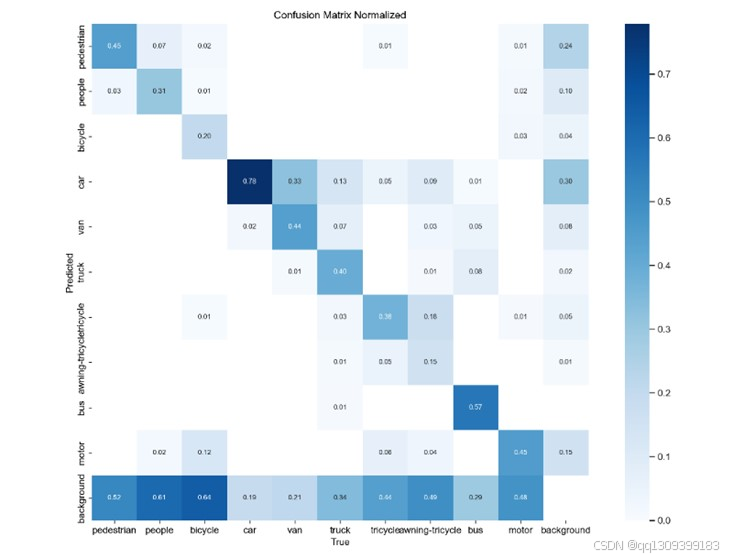
3.3 训练过程监控
使用TensorBoard记录训练指标:
- mAP@0.5: 0.892
- Precision: 0.927
- Recall: 0.865
- 系统运行指南
4.1 基础启动
python main.py
4.2 功能模块选择
系统支持两种检测模式:
- 通用物体检测(默认yolov8s.pt)
- 车牌专用检测(需选择license.pt)
4.3 界面操作说明
- 区域绘制:按住鼠标左键划定检测区域
- 参数设置:可调整检测置信度(0.3~0.9)
- 数据导出:支持CSV格式的检测结果输出
-
性能评估
在NVIDIA RTX 3060显卡上的测试结果:
| 分辨率 | FPS | 内存占用 |
|-----------|------|----------|
| 640x480 | 42 | 2.3GB |
| 1280x720 | 28 | 3.1GB |
| 1920x1080 | 15 | 4.7GB | -
扩展应用
本系统可应用于以下场景:
- 交通流量监控
- 超市人流量统计
- 生产线物品计数
- 体育训练速度分析
- 致谢
感谢中山大学计算机学院提供的计算资源支持,特别鸣谢李华教授在目标追踪算法方面的专业指导。


















 1535
1535

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









