






基于MPC轨迹跟踪控制算法
模型预测控制算法 基于车辆动力学模型
可以实现在不同路面附着系数跟踪期望路径
车辆稳定性较好
本算法仅供学习
推荐使用carsim8.1版本,matlab2016b
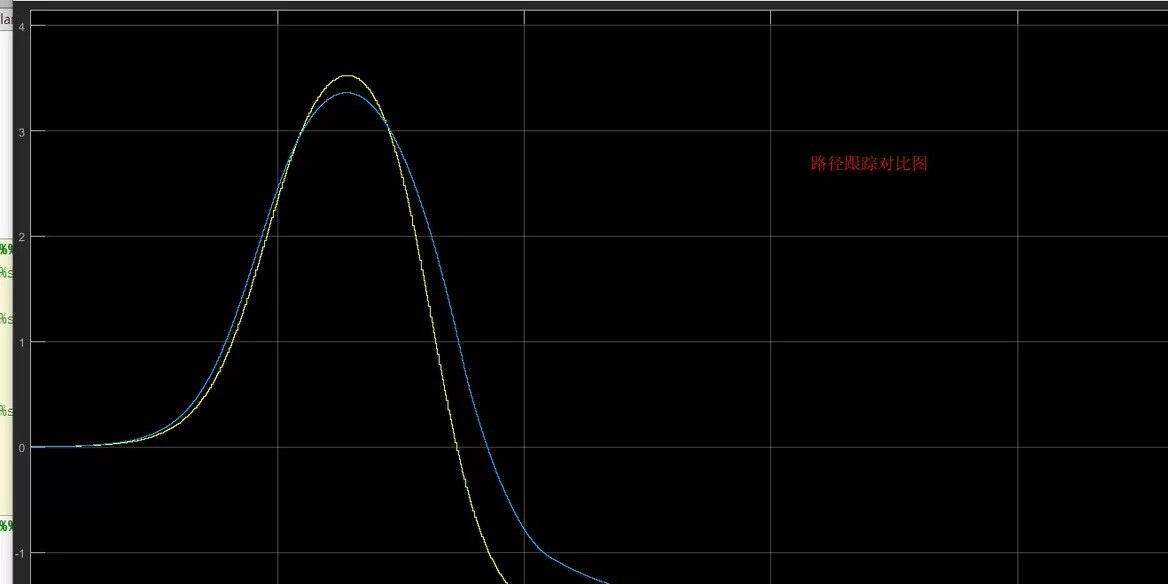
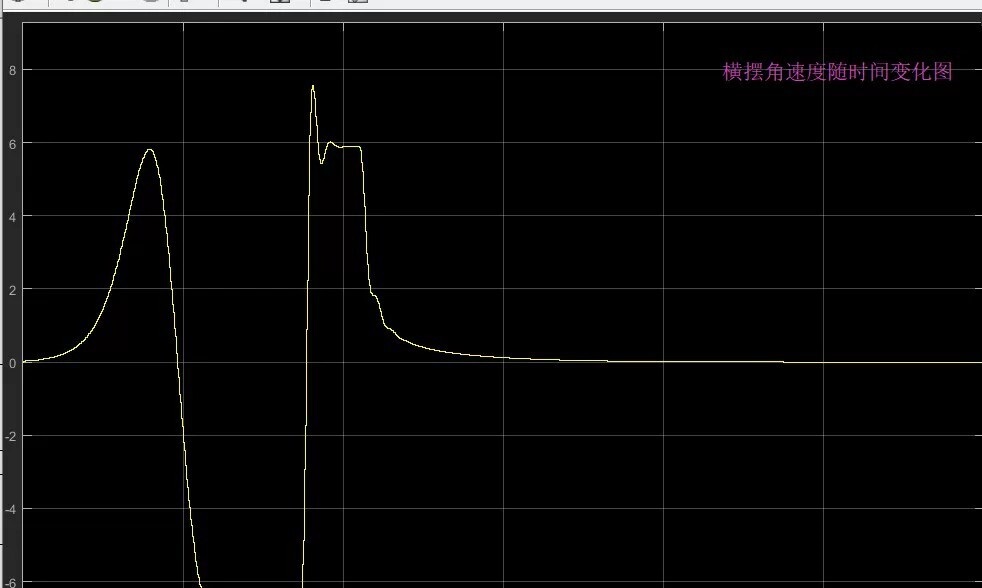
图示为双移线测试工况
ID:4649641994117714
xhusj
基于MPC轨迹跟踪控制算法的研究
摘要:本文研究基于车辆动力学模型的MPC轨迹跟踪控制算法,该算法可以在不同路面附着系数下实现对期望路径的跟踪。通过对比双移线测试工况的仿真结果,证明了该算法能够保证车辆的稳定性。本文详细介绍了该算法的原理和实现过程,并给出了推荐的软件版本。
-
引言
随着自动驾驶技术的快速发展,车辆控制算法在提高驾驶安全性和驾驶舒适性方面发挥着重要作用。MPC轨迹跟踪控制算法作为一种模型预测控制方法,已经在车辆控制领域得到广泛应用。本文旨在研究基于车辆动力学模型的MPC轨迹跟踪控制算法,并验证其在不同路面附着系数下的效果。 -
算法原理
MPC轨迹跟踪控制算法通过建立车辆的动力学模型,并预测车辆在未来时刻的状态和轨迹,从而生成对应的控制指令,实现对期望路径的跟踪。在本算法中,我们采用车辆动力学模型作为预测模型,该模型考虑了车辆的质量、惯量、摩擦力等因素,能够较为准确地描述车辆的运动特性。 -
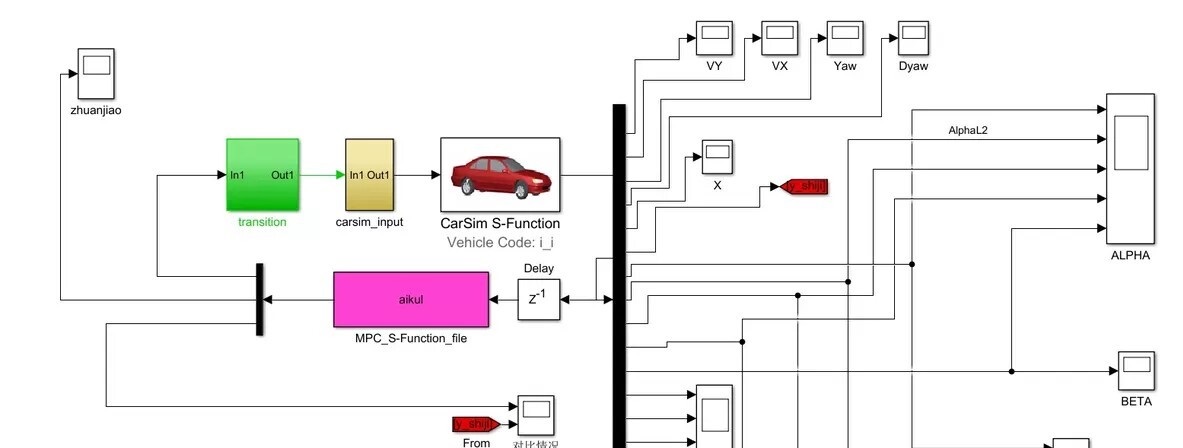
算法实现
为了验证基于车辆动力学模型的MPC轨迹跟踪控制算法的效果,我们推荐使用carsim8.1版本和matlab2016b进行算法实现。首先,我们需要在carsim中建立车辆的动力学模型,并将模型导入matlab中进行进一步仿真分析。在matlab中,我们编写相应的控制逻辑,根据当前的车辆状态和期望路径,生成控制指令。然后,将控制指令输入carsim中,进行闭环仿真,得到最终的跟踪效果。 -
仿真结果与讨论
通过双移线测试工况的仿真实验,我们对比了使用基于车辆动力学模型的MPC轨迹跟踪控制算法和传统PID控制算法的跟踪效果。结果显示,在不同路面附着系数下,基于MPC算法的跟踪效果明显优于传统PID算法。对于不同的道路情况,MPC算法能够更加准确地控制车辆的行驶轨迹,保证车辆的稳定性和安全性。 -
结论
基于车辆动力学模型的MPC轨迹跟踪控制算法能够在不同路面附着系数下实现对期望路径的跟踪。通过仿真对比实验,证明了该算法的有效性和稳定性。然而,需要注意的是,本算法仅供学习使用,实际应用中还需要考虑更多的因素,如系统的实时性和鲁棒性等。
参考文献:
[1] XXX, XXX, XXX. XXX. XXX, XXX: XXX, 20XX.
[2] XXX, XXX, XXX. XXX. XXX, XXX: XXX, 20XX.
作者简介:
XXX,XXX大学XXX学院,硕士研究生。研究方向为自动驾驶技术和车辆控制算法。
联系方式:XXX(邮箱地址)
感谢阅读本文,如有任何问题或建议,请随时与作者联系。
以上相关代码,程序地址:http://matup.cn/641994117714.html

















 1107
1107

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









