






基于MPC轨迹跟踪控制算法
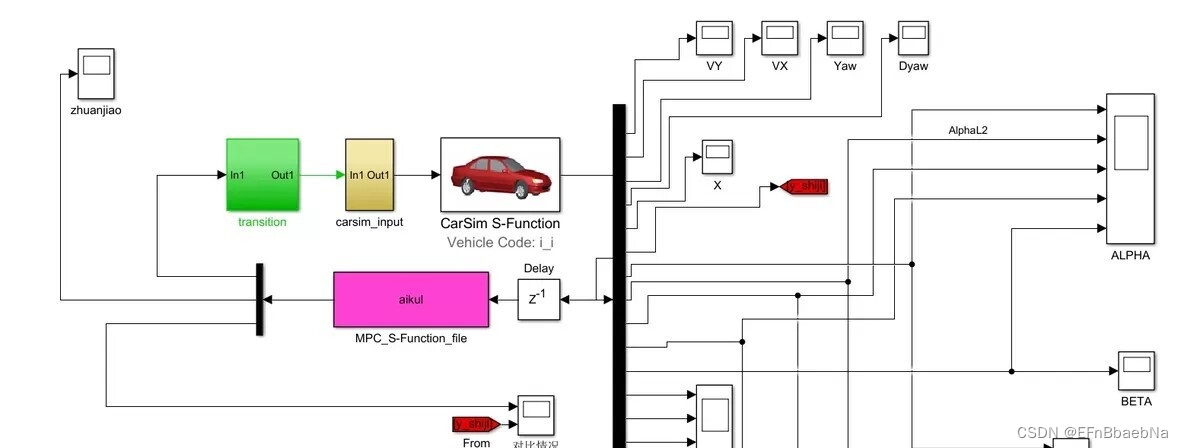
模型预测控制算法 基于车辆动力学模型
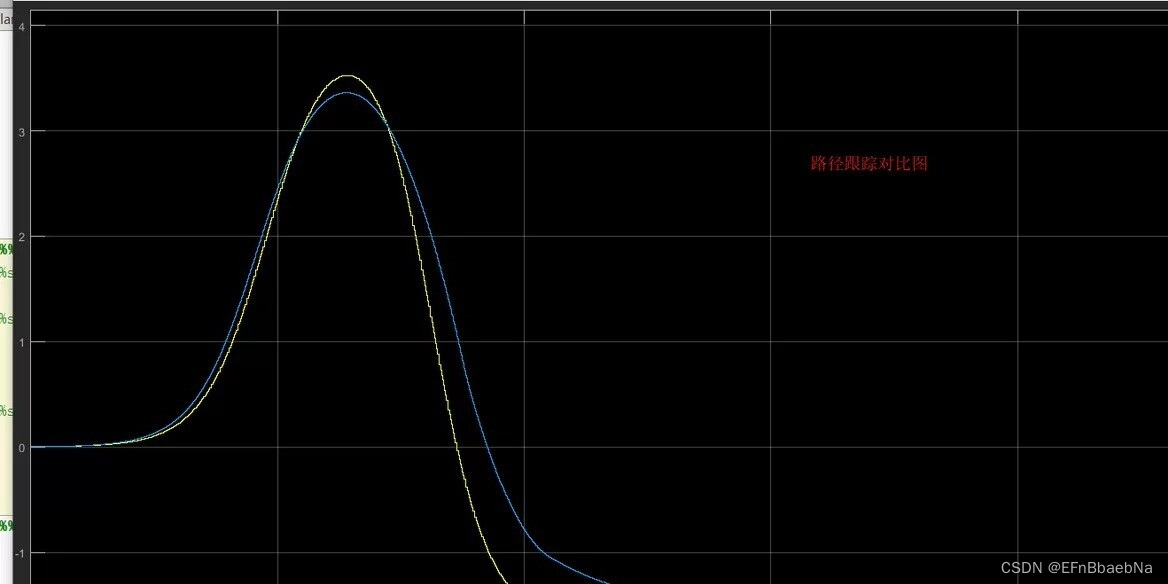
可以实现在不同路面附着系数跟踪期望路径
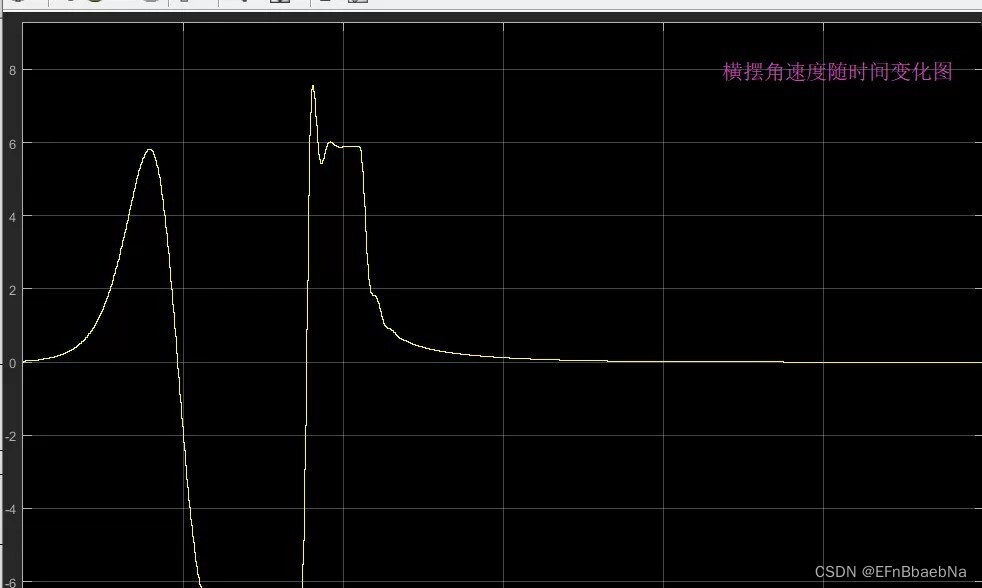
车辆稳定性较好
本算法仅供学习
推荐使用carsim8.1版本,matlab2016b
图示为双移线测试工况
基于MPC轨迹跟踪控制算法的技术分析
随着科技的不断发展,汽车行业在各项技术上也得到了迅猛的发展。而在车辆控制技术方面,MPC轨迹跟踪控制算法已经成为一个备受关注的主题。本文将围绕基于MPC轨迹跟踪控制算法的技术分析展开,对其实现原理、优缺点以及应用范围进行详细阐述。
一、MPC轨迹跟踪控制算法的实现原理
MPC(Model Predictive Control),模型预测控制算法,是一种基于系统动态模型的优化控制方法,可以用于处理具有复杂非线性因素和多变量交互影响的问题。而基于MPC的轨迹跟踪控制算法,是一种在车辆控制方面应用广泛的技术。
该算法的实现原理是通过车辆动力学模型来建立车辆运动方程,结合路径规划算法生成期望路径,同时结合控制器来计算车辆应该执行的控制动作。该控制器处于一个开环状态,相当于执行一个预测控制过程,每次计算出当前时间到未来一段时间内的控制量,然后执行这些控制量,再重新计算下一次的控制过程。
在MPC轨迹跟踪控制算法中,车辆的运动状态与期望路径的误差被用作目标函数,然后通过模型预测的方式来计算控制量,以使目标函数最小化。
二、MPC轨迹跟踪控制算法的优缺点
优点:
1.可以实现在不同路面附着系数跟踪期望路径,具有较好的适应性和稳健性。
2.可以满足复杂道路的控制需求,如曲线道路和斜坡道路等。
3.可以较好地解决状态限制问题,如车辆转向角速度、侧向加速度等。
4.可以提高车辆控制精度和安全性,减少能耗、磨损等等,实现更高效的行车环境。
缺点:
1.需要较高的计算能力和较长的计算时间,对计算资源的要求较高。
2.对控制参数的选择和调整有较高的要求,需要较高的控制专业技能。
3.针对特定车辆和行车环境需进行定制,可移植性较差。
三、MPC轨迹跟踪控制算法的应用范围
基于MPC轨迹跟踪控制算法的技术在智能交通、自动驾驶以及工业生产等领域都有广泛的应用。其中,在智能交通领域,该技术可以应用于车辆的自动驾驶控制,实现更加精确和安全的行车环境;在工业生产领域,该技术可以用于自动驾驶叉车等指导性工具的控制,提高工作效率和安全性。
四、结论
基于MPC轨迹跟踪控制算法的技术,在车辆控制领域具有广泛的应用前景,该技术可实现在不同路面附着系数跟踪期望路径,车辆控制精度高,具有较好的适应性和稳健性。但针对车辆和行车环境需进行定制,对控制参数的选择和调整有较高的要求,需要较高的控制专业技能。相信在不久的未来,该技术将在智能交通、自动驾驶和工业生产等领域中得到广泛应用。
相关代码,程序地址:http://lanzouw.top/641994117714.html















 870
870











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









