






DSP28335 永磁同步电机代码
CCS编辑,有PI控制算法、速度电流双闭环控制。
有方波有感无感算法,无感为3段反电势过零点。
有pmsm有感无感算法,有感有hall的foc,有磁编码器的,有增量编码器的。
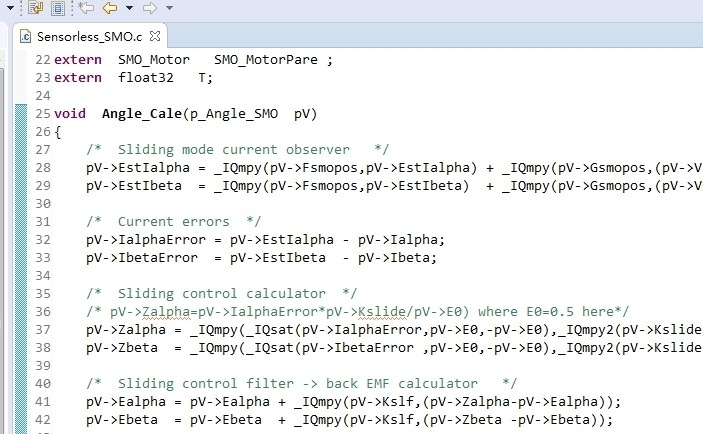
无感为滑模观测器的。
提供原理图,源代码
ID:4150680238426920
左手指月
DSP28335是一种常见的数字信号处理器,它在永磁同步电机控制中发挥着重要的作用。本文将围绕DSP28335的永磁同步电机控制代码展开讨论,重点介绍CCS编辑软件、PI控制算法、速度电流双闭环控制以及各种算法和编码器的应用。
首先,CCS编辑是一种常用的软件,用于DSP28335的代码编写和调试。在永磁同步电机控制中,CCS编辑提供了便捷的开发环境和强大的调试功能,使得程序员能够快速地编写和测试代码。同时,CCS编辑还支持对PI控制算法、速度电流双闭环控制等关键算法的实现和调试。
其次,PI控制算法在永磁同步电机控制中扮演着重要的角色。PI控制器是一种经典的控制算法,通过比较实际输出和期望输出的差异,计算出控制变量的修正量。在永磁同步电机控制中,PI控制算法能够根据电机的实时状态和控制要求,实现精确的电流和速度控制。通过CCS编辑编写的代码,可以很方便地实现PI控制算法,并通过DSP28335实时控制电机。
速度电流双闭环控制是一种常用的电机控制策略。在永磁同步电机控制中,通过同时控制电流和速度两个闭环,可以实现更精确的控制效果。具体实现上,电流闭环控制可以通过PI控制算法实现,而速度闭环控制则可以通过PID控制算法实现。通过CCS编辑,可以方便地将这两个闭环控制的代码编写和调试。
在永磁同步电机控制中,方波有感无感算法是一种常见的速度估算方法。这种方法通过电机的反电势过零点来测量电机的转速。具体实现上,方波算法通过检测电流与电机反电势的夹角,来判断电机是否处于电流闭环控制状态。当电机电流和反电势波形相位一致时,电机处于有感控制状态;当电流和反电势波形相位相差180度时,电机处于无感控制状态。通过CCS编辑编写的代码,可以实现方波有感无感算法,并将其应用于永磁同步电机控制中。
除了方波有感无感算法外,还有PMSM有感无感算法可供选择。PMSM有感无感算法是一种电机位置估算方法,通过检测电机的磁场位置来实现精确的控制。具体实现上,PMSM有感无感算法可以基于Hall传感器或磁编码器等装置,来测量电机的转子位置。通过CCS编辑编写的代码,可以实现PMSM有感无感算法,并将其应用于永磁同步电机控制中。
最后,滑模观测器是一种常用的无感控制算法。在永磁同步电机控制中,滑模观测器可以通过对电机的状态进行观测和估算,从而实现无感控制。具体实现上,滑模观测器通过固定的滑模面和滑模控制律,将电机的状态推向滑模面,并实现对电机状态的估算和控制。通过CCS编辑编写的代码,可以将滑模观测器应用于无感控制算法,实现精确的电机控制。
总结一下,本文围绕DSP28335的永磁同步电机控制代码展开讨论,重点介绍了CCS编辑软件、PI控制算法、速度电流双闭环控制以及方波有感无感算法、PMSM有感无感算法和滑模观测器的应用。通过CCS编辑编写的代码,可以实现
相关的代码,程序地址如下:http://matup.cn/680238426920.html
















 471
471











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









