







 本文详细介绍了飞行实时仿真系统的构成、工作原理,包括飞行控制、制导和导航系统的仿真,以及其在飞机和导弹研究中的应用。重点阐述了系统的功能,如飞行性能分析、控制律研究等,并探讨了实时性、建模、环境仿真设备的动态特性等关键问题。
本文详细介绍了飞行实时仿真系统的构成、工作原理,包括飞行控制、制导和导航系统的仿真,以及其在飞机和导弹研究中的应用。重点阐述了系统的功能,如飞行性能分析、控制律研究等,并探讨了实时性、建模、环境仿真设备的动态特性等关键问题。
目录
二、飞行实时仿真系统
2.1 飞行实时仿真系统的组成及原理
飞行实时仿真系统用于飞行器的飞行性能和飞行控制、制导、导航等系统的研究。飞行半实物仿真系统(下图)将接入飞行控制、制导、导航等系统的传感器、计算机、执行机构等实物,飞行器飞行动力学数学模型、系统模型、仿真环境模型、外干扰模型等都在仿真计算机上解算,仿真环境模型产生的驱动信号将控制各种物理效应设备,形成各种传感器测量用的虚拟环境。仿真总控台将控制整个仿真系统的运行,包括初始条件和参数的设置、运行过程中的监控和参数记录存储、运行后的试验结果评估和文档建立等。
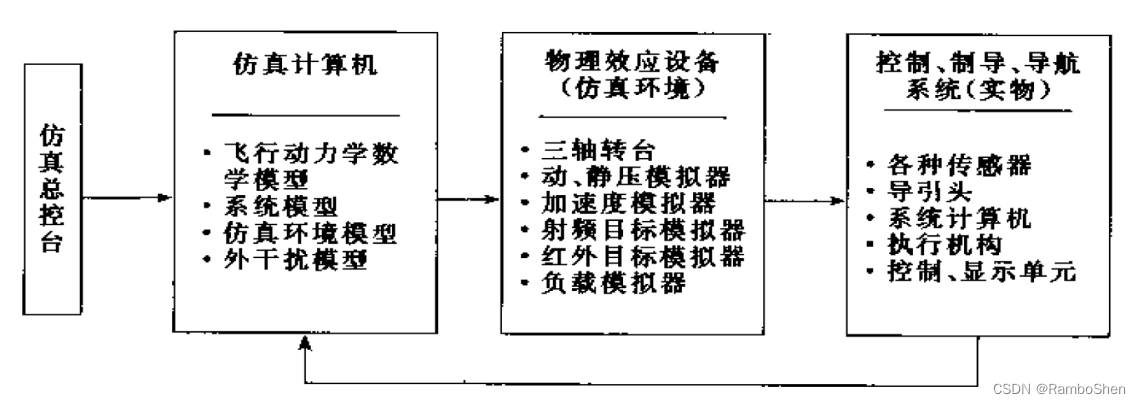
飞机飞行控制系统的主要传感器有姿态陀螺仪、航向陀螺仪、动-静压传感器、过载传感器等,飞机飞行控制半实物仿真系统相应的物理效应设备有三轴转台、动-静压模拟器、加速度模拟器等。
三轴转台模拟复现飞机姿态角运动,分别由仿真计算机中飞行动力学数学模型解算出的俯仰角、倾斜角、航向角等基本信号驱动。仿真实验时,飞行控制系统的水平姿态陀螺、航向陀螺、角速率陀螺安装在三轴转台上。
动-静压模拟器是一种由伺服系统控制气体容器压力变化的装置,控制信号由仿真计算机中大气数学模型和飞行动力学数学模型解算获得,飞机上的动-静压传感器直接与气体容器连接。
稳定的恒速转台产生的离心加速度分量是实现加速度模拟的一种技术方案,仿真实验时,加速度传感器置于恒速转台上,其位置和测量轴线方位随加速度信号改变。飞行控制系统的执行机构操纵飞机舵面时将克服气动载荷形成的铰链力矩,它是飞行速度、飞行高度、舵偏角的函数,负载模拟器将模拟生成铰链力矩加载于飞行控制系统的执行机构(舵机),负载模拟器是一种力伺服系统。
导弹控制制导系统具有姿态传感器、加速度传感器、导引头等测量装置。导弹制导系统的制式有多种,主要区别在于导引头的结构和特性不同,按导引头接收的能量和信号的物理特性来分,有射频、红外、可见光图像、红外图像等。对于不同类型的导引头,进行半实物仿真实验时,必须有对应的射频目标模拟器和红外目标模拟器。
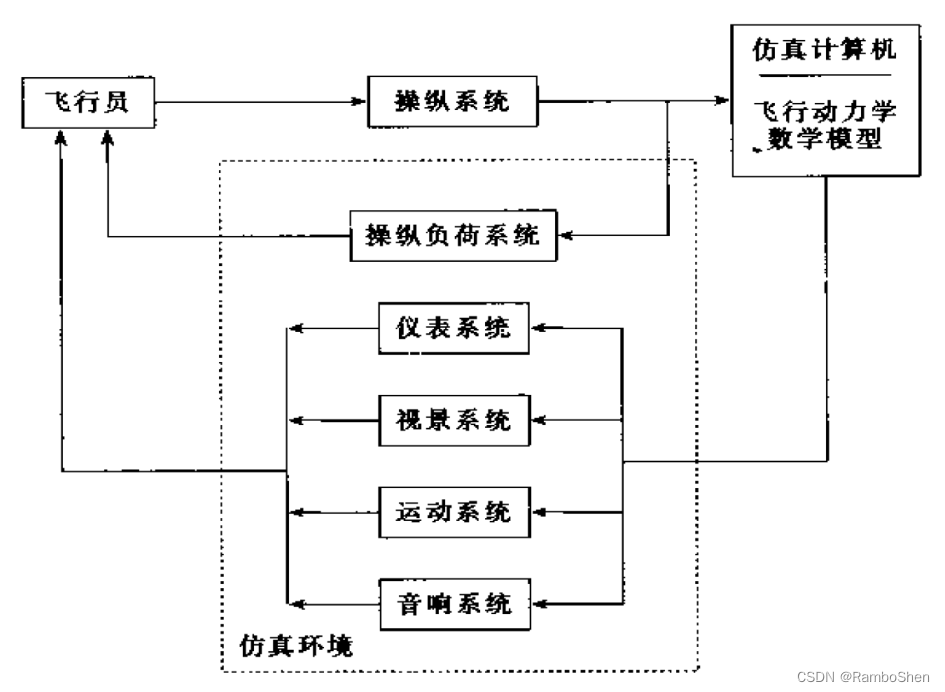
飞行模拟器是典型的人在回路仿真系统,飞行模拟器复现空中飞行环境,用于对飞行员进行起飞、着陆、爬升、转弯、机动飞行等训练,也可用于对飞机飞行性能、飞机操纵品质、机载 系统性能进行分析研究。飞行模拟器有仿真计算机、模拟座舱、运动系统、视景系统、音响系统、操纵负荷系统、仿真总控台组成。飞行器飞行动力学模型、系统模型、仿真环境模型、外干扰模型等由仿真计算机解算,通过运动系统、视景系统、音响系统形成给飞行员多维感知信息仿真环境,飞行员根据上述信息犹如在空中一样操纵“飞机”飞行。
2.2 飞行实时仿真系统功能
飞行半实物仿真系统的功能主要在于对飞行控制、制导、导航系统进行分析研究,包括控制规律、制导规律和导航方式的确定,参数的选择,系统的匹配等,同时对飞行器 (飞机,导弹)的动态特性、飞行品质、制导与导航精度进行分析评估。
飞机飞行模拟器的主要功能:
- 评定飞机飞行动力学特性;
- 飞机飞行操纵性和稳定性研究;
- 飞行控制系统控制律研究;
- 评定飞机操纵系统;
- 评定座舱布局和仪表显示;
- 评定航空综合电子系统的结构、硬件和软件;
- 机载武器系统的评定;
- 对空攻击和对地攻击;
- 空战和武器群仿真;
- 飞行综合控制管理系统研究;
- 应急和故障条件下的操作特性研究;
- 飞行训练。
2.3 飞行实时仿真系统的基本性能
人在回路飞行实时仿真系统,即飞行模拟器的基本性能,飞行模拟器的原理如下图所示,是一种复杂的仿真系统。
以某飞机飞行模拟器为例,基本性能如下:
1、 功能
- 飞行前的准备;
- 滑行和起飞;
- 爬升、平飞、转弯、下滑、进场和着陆;
- 航线飞行;
- 复飞;
- 夜航;
- 通讯、导航、转场;
- 各种飞行条件下的失速模拟;
- 飞行中的特殊情况处理;
- 实时飞行记录;
- 复现飞行;
- 锁定与冻结。
2、液压驱动的六自由度运动系统。
3、计算机成像视景系统
三通道、四窗口。对每个飞行员的视场角为75°x30°。
4、数字式操纵负荷系统帧速率为1000Hz,液压伺服加载。
5、采用分布式多处理机计算机系统。
6、接口
A/D80路,D/A200路,开人704路,开出575路,D/D接口包括: ARINC429,ARINC575,RS-422和RS-232。
7、建模与算法
采用全量变系数非线性方程;
采用实时快速数值积分算法;
模块化建模、划分速率块调度。
8、编程语言平用FORTRAN77,C语言,汇编语言。
9、模拟式音响系统。
10、触敏式监视器教员控制台。
11、C级飞行模拟器。
12、可用率A>97%。
下面讨论几个概念上的重要问题。
1、建模是仿真的基础
建立数学模型是仿真的基础。如果数学模型不正确;则仿真结果也不正确;如果数学模型不精确,则仿真结果也不精确。飞行模拟器将模拟全飞行包线范围内的飞行,其飞行高度、飞行速度变化范围大,飞行动力学数学模型不能采用小扰动线性化方程,应采用精确的全量非线性变系数方程组来描述。这种飞行动力学数学模型建立后还有两个因素影响仿真结果:其一是选用的数值积分算法,它将影响仿真精度;其二是气动数据,它将影响仿真精度,甚至影响仿真结果是否正确。建立的数学模型必须经过验证,应通过与真实系统响应特性和数据的比较来进行验模的工作。
2、实时性问题
半实物仿真系统和人在回路仿真系统都要求实时运行。实时性是指控制信号输人后系统的时间响应特性能正确反映数学模型所描述的真实系统在同样控制信号输入时的时间响应特性。但是数字计算机运行解算数学模型的程序只能逐条“串行"进行,也就是说运行解算一遍系统数学模型的程序需要一定的时间,这个时间间隔可以称作“帧周期”,对于飞行实时仿真系统来说,一般为几ms至几十ms。帧周期主要应根据仿真系统内表征动态特性的参数变化快慢来确定。在一个周期内认为输入和外界条件是不变的,一个周期内解算的结果实质上只是连续时间中某个采样点的值,同样一个周期内的解算结果和输出值保持不变,这就是计算机仿真系统采样离散化后与真实连续系统的差别和近似。若在一个周期内输入和外界条件变化很大,其解算结果和输出就不能正确反映真实连续系统在“帧周期”这段时间间隔内的真实响应状况,这说明系统没有满足实时性要求。操纵入员或实物参与到系统仿真回路中时,仿真系统必须能正确的反映真实系统时间响成特性,而计算机仿真系统采用采样离散化和帧周期运行方式,要满足仿真系统的实时性要求只有选择合适的帧周期。对于数学模型和程序规模大的复杂系统,在一个帧周期内运算不完时,可采用多CPU或多机联网的方式以满足实时性要求。
3、计算机实时仿真系统的数据采样和帧周期特性
计算机实时仿真系统与计算机控制系统有许多类似之处,本质上都属于数据采样系统,如下图所示。输入的控制信号由飞行员操纵杆、舵或控制面板的开关、旋钮产生,经输入采样开关T和A/D变换器,将连续的模拟信号转换为离散的数字信号送入仿真计算机。
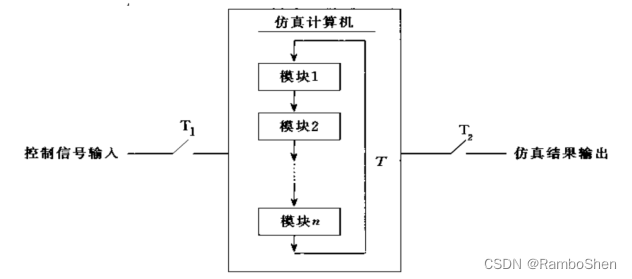
仿真计算机中运行多个程序模块(模块1,…,模块n),设重复循环计算的帧周期为T。仿真结果经输出采样开关和D/A变换器,将离散的数字信号转换为连续的模拟信号,去驱动运动系统、仪表系统、视景系统等仿真环境的物理效应设备。理论上分析这种数据采样系统时,一般假定各采样开关是同步同周期的,即
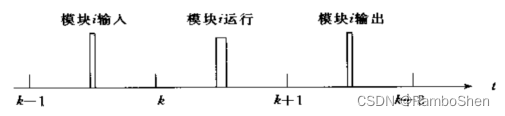
。实际上,仿真系统有多个控制信号输入和多个仿真结果输出。理想的情况下每个帧周期内先处理控制信号输人,然后进行各程序模块的运算,最后处理仿真结果的输出,如下图所示。

在实际的实时仿真系统中,为了充分发挥CPU的效率,提高实时性往往将程序模块的运行和输入/输出信号的处理(I/O接口)并行进行,如下图所示。
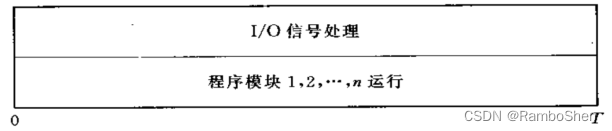
这种并行处理的方案可能带来系统的时间延迟,例如程序模块i在第k个顿周期计算时可能本帧内程序模块i所需的输入控制信号尚未采入,只能使用上一帧(第k-1帧)采入的数据,这样第k帧程序模块i计算的结果对应的是上一顿(第k-1)的,时间延迟了一个帧周期:假如程序模块i运行得出结果时对应的I/O接口输出时序已过,只能等下一帧(第k十1帧)输出去,这样在时间上又延迟了一个周期(见下图)。
4、环境仿真设备的动、静态特性将直接影响仿真系统的精度和置信度
由上节可知,环境仿真设备在真实的人-机(飞行员-飞机)系统中是不存在的,环境仿真设备是飞行仿真系统外加的中间环节。显然,这种中间环节的引入必然给仿真系统带来误差和失真。从控制理论观点来看,这些外加的中间环节理想的传递函数应为增益为1的比例环节。若环境仿真设备的输入输出特性能用增益为1的比例环节描述,则这种环境仿真设备的引人不会给仿真系统带来失真和误差。但是这种要求是达不到的,为此只能在满足仿真系统技术要求的前提下,对环境仿真设备的静态,动态特性加以严格限制,如要求响应时间快、频带宽非线性失真小、响应过程平稳等等。
5、仿真环境中视觉、听觉、动感的时间延迟和同步问题
视景系统、运动系统、仪表系统、操纵负荷系统、音响系统等环境仿真设备是飞行仿真系统外加的中间环节,有各自的静态特性和动态特性,同时给仿真系统增加了时间延迟。各个环境仿真系统是独立运行的,这些系统给飞行员提供综合感知信息。因此,各个环境仿真系统的同步是重要的,若仿真环境提供的视觉、听觉、动感等有“时间差”,将使飞行员不能正常操纵飞机。通常规定,视觉、听觉、动感的时间不同步应小于100 ms~150 ms。
参考文献:王行仁 《飞行实时仿真系统及技术》,北京航空航天大学出版社

















 808
808

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









