






Mavros offboard
1 UDP实现wifi数传
机载电脑端设置
roscd mavros/launch
sudo gedit px4.launch
随后修改gcs地址
<launch>
<!-- vim: set ft=xml noet : -->
<!-- example launch script for PX4 based FCU's -->
<arg name="fcu_url" default="/dev/ttyACM0:57600" />
<!-- 修改这一行! -->
<arg name="gcs_url" default="udp://:14550@" />
<arg name="tgt_system" default="1" />
<arg name="tgt_component" default="1" />
<arg name="log_output" default="screen" />
<arg name="fcu_protocol" default="v2.0" />
<arg name="respawn_mavros" default="false" />
<include file="$(find mavros)/launch/node.launch">
<arg name="pluginlists_yaml" value="$(find mavros)/launch/px4_pluginlists.yaml" />
<arg name="config_yaml" value="$(find mavros)/launch/px4_config.yaml" />
<arg name="fcu_url" value="$(arg fcu_url)" />
<arg name="gcs_url" value="$(arg gcs_url)" />
<arg name="tgt_system" value="$(arg tgt_system)" />
<arg name="tgt_component" value="$(arg tgt_component)" />
<arg name="log_output" value="$(arg log_output)" />
<arg name="fcu_protocol" value="$(arg fcu_protocol)" />
<arg name="respawn_mavros" default="$(arg respawn_mavros)" />
</include>
</launch>
随后启动Mavros即可发布UDP数据。
使用命令ifconfig查看机载电脑的ip。
qgc端设置
打开qgroundcontrol,在通讯连接中点击添加
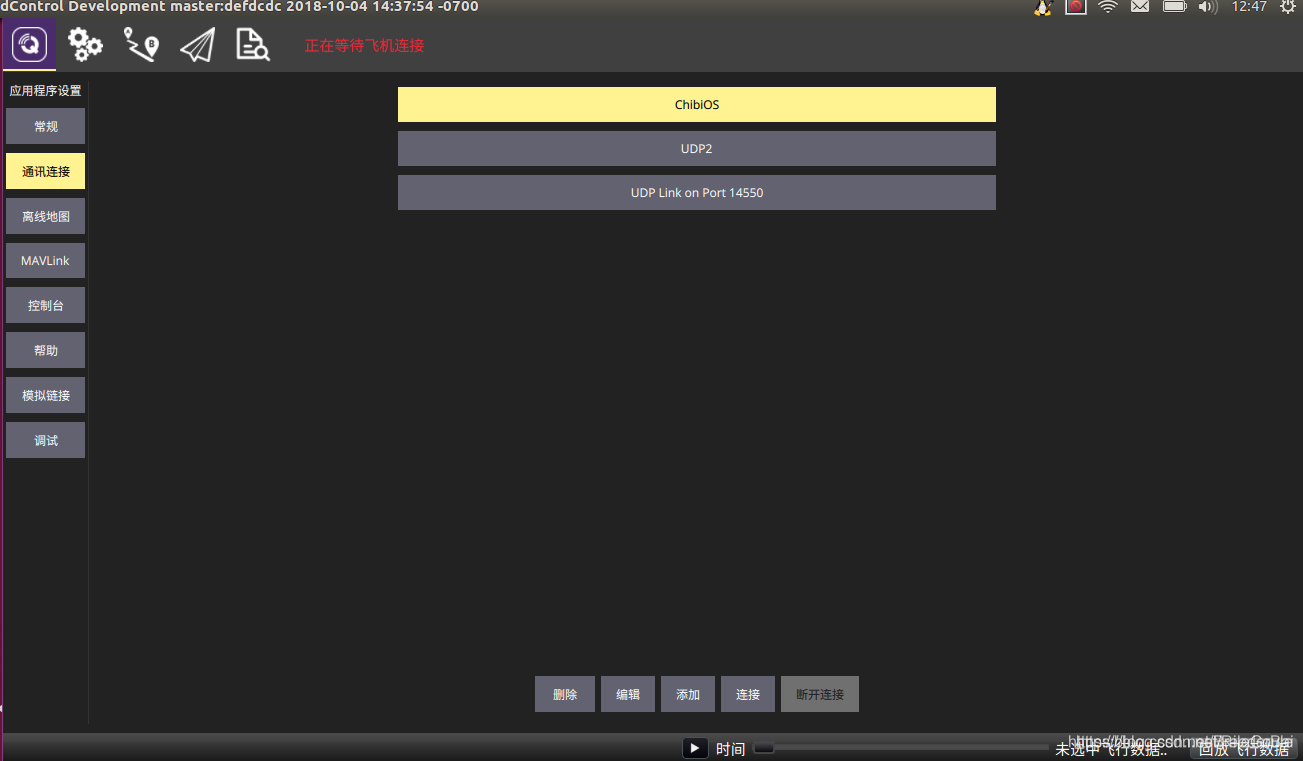
选择UDP,监听端口和之前设置的14550一致,目标主机填写板载电脑的ip:

2 查看飞行日志
将飞控连接到qgroundcontrol,下载飞行日志。随后打开网页https://logs.px4.io/上传日志即可可视化飞行数据,进行调参。
更多高级功能参考源网站https://github.com/PX4/flight_review。
官方说明:https://docs.px4.io/master/en/getting_started/flight_reporting.html














 1371
1371











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









