






 本文详细解析了MD500E代码中的关键技术,如PMSMFOC控制、参数辨识、死区补偿等,介绍了各种电机控制算法的原理、实现和优化策略,为驱动器控制领域的专业人士提供深入理解和应用指导。
本文详细解析了MD500E代码中的关键技术,如PMSMFOC控制、参数辨识、死区补偿等,介绍了各种电机控制算法的原理、实现和优化策略,为驱动器控制领域的专业人士提供深入理解和应用指导。
驱动器 控制器伺服驱动器资料 md500e代码
MD500E代码方案和解析文档+原理图+送仿真资料。
包含pmsm的foc控制算法,电阻、电感、磁链等参数的辩识算法,死区补偿算法过调制处理算法,弱磁控制算法,无感FOC控制算法,电流环自整定算法,磁链观测器算法。
ID:9146682649041496
西南害羞的贝母
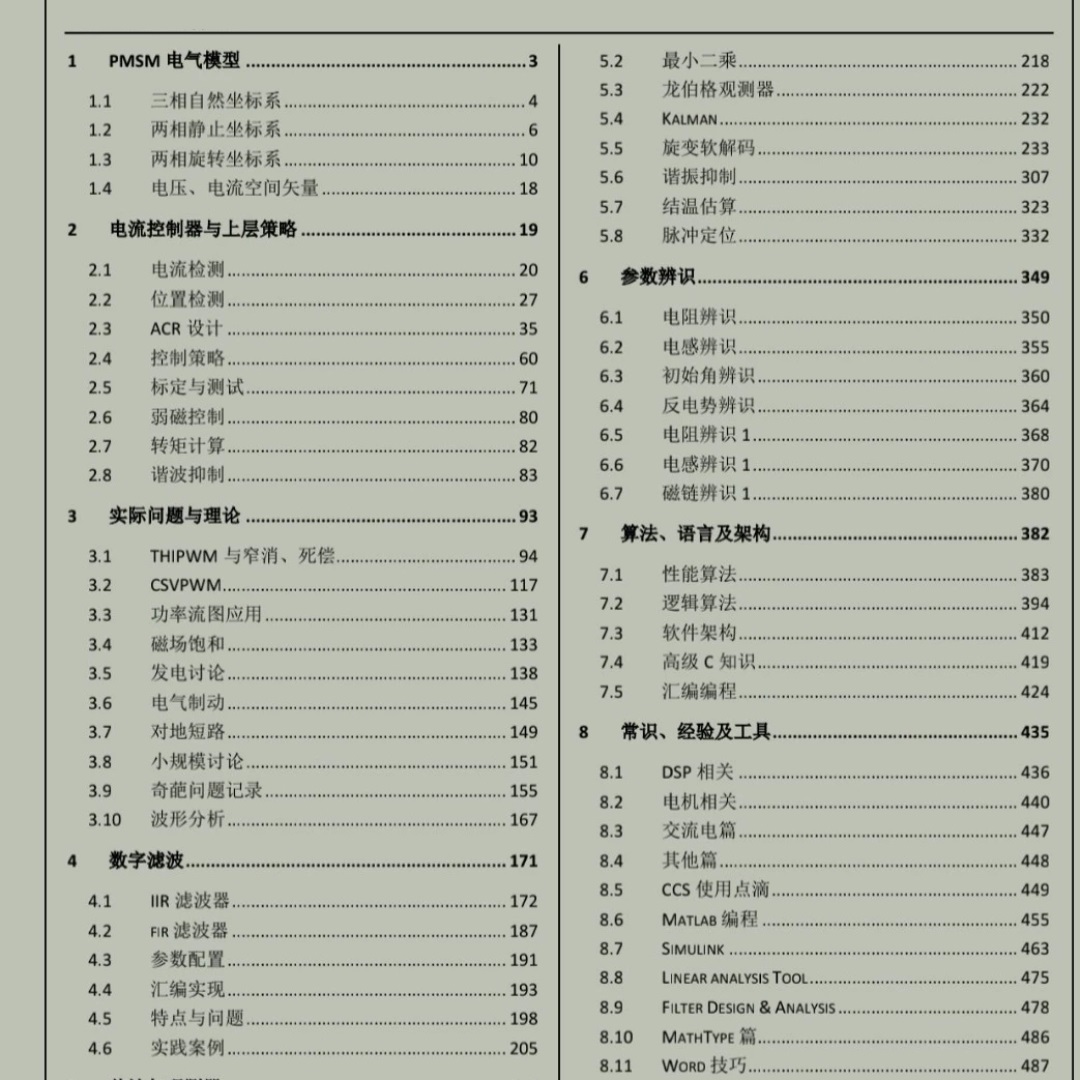
驱动器控制器伺服驱动器资料MD500E代码方案和解析文档+原理图+送仿真资料是一份非常专业的技术文档,它涵盖了多个关键技术领域,包括PMSM的FOC控制算法、参数辩识算法、死区补偿算法、过调制处理算法、弱磁控制算法、无感FOC控制算法、电流环自整定算法以及磁链观测器算法。本文将围绕这些关键技术展开深入分析,探讨它们的原理、应用以及优化方案。
首先,我们将从PMSM的FOC控制算法入手。PMSM是一种常见的交流电机类型,其FOC控制算法能够实现对电机速度、位置及扭矩的精确控制。该算法通过将电机转子的磁场与定子磁场进行精确耦合,实现对电机的精准控制。我们将介绍FOC算法的原理和实现方式,并探讨如何通过优化算法参数和控制策略来提高电机的控制性能。
接下来,我们将研究参数辩识算法。在实际应用中,电机的各项参数常常难以准确测量或者变化较大,因此,需要通过参数辩识算法来估计和校准这些参数。我们将介绍常见的参数辩识算法,包括基于模型的辩识算法和基于神经网络的辩识算法,并讨论它们的优缺点及适用范围。
此外,我们还将讨论死区补偿算法和过调制处理算法。死区补偿算法能够有效抑制电机控制中的死区现象,提高控制的精度和稳定性。而过调制处理算法则通过对电机输出信号进行加权处理,使其在高频段具有更好的控制性能,从而提高电机的输出能力和响应速度。我们将详细介绍这些算法的原理和实现方法,并探讨它们在实际应用中的效果和优化方案。
弱磁控制算法是一种特殊的电机控制方法,用于在低速和低负载条件下提高电机的输出性能。该算法通过改变电流矢量的方向和大小,实现对电机转子的精确控制。我们将详细介绍弱磁控制算法的原理和应用场景,并讨论如何通过优化算法参数和控制策略来提高电机的控制性能。
在无感FOC控制算法中,电机转子位置传感器被省略,使得控制系统更加简洁和稳定。该算法通过观测电机转子位置的变化,实现对电机速度和位置的估计。我们将介绍无感FOC控制算法的原理和实现方式,并讨论其优势和适用条件。
此外,我们还将介绍电流环自整定算法和磁链观测器算法。电流环自整定算法能够自动调整电流控制环的参数,提高电机的动态响应和稳定性。磁链观测器算法则通过对电机磁链的变化进行观测和估计,实现精准控制。我们将详细介绍这些算法的原理和应用场景,并讨论它们的优化措施和改进方案。
通过对驱动器控制器伺服驱动器资料MD500E代码方案和解析文档+原理图+送仿真资料的分析和讨论,我们对包含PMSM的FOC控制算法、参数辩识算法、死区补偿算法、过调制处理算法、弱磁控制算法、无感FOC控制算法、电流环自整定算法以及磁链观测器算法等多项关键技术有了深入的了解。在实际应用中,我们可以根据具体需求和场景选择合适的算法和优化方案,提高电机的控制性能和效率。同时,我们也可以进一步研究和探索更加先进的控制算法和技术,以满足不断发展的工业自动化需求。
【相关代码 程序地址】: http://nodep.cn/682649041496.html















 1226
1226











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









