






 本文介绍了一种简易八足机器人的设计原理与实现方法。通过两侧仿生机构的差速运动,机器人可以完成多种行走功能。文章还展示了如何利用偏心轮连杆结构形成基本的四足和八足机构,并提供了扩展样机的设计方案。
本文介绍了一种简易八足机器人的设计原理与实现方法。通过两侧仿生机构的差速运动,机器人可以完成多种行走功能。文章还展示了如何利用偏心轮连杆结构形成基本的四足和八足机构,并提供了扩展样机的设计方案。
1. 运动功能说明
简易八足机器人可以通过两侧仿生机构的差速运动来实现前进、后退、原地转向、弧形转向等基本行走功能。
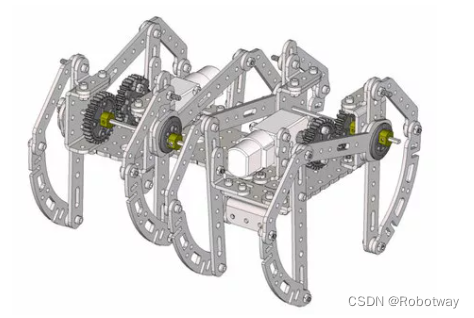
2.结构说明
该样机其实是由两个偏心轮连杆简易四足并排组合构成的,在每条腿上安装了两个装饰性的活动连杆,让它的外观更像蜘蛛或螃蟹。

3. 运动功能实现
偏心轮连杆简易八足机构的运动方式是差速运动,与小型双轮差速底盘一样,请参考小型双轮差速底盘一文。
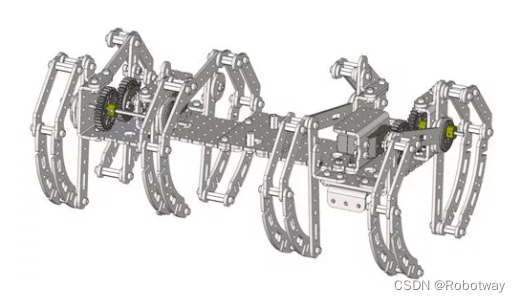
4.扩展样机
本样机有一些扩展案例,基本是使用不同构型的偏心轮连杆简易四足机构,如取消传动轴,将两侧的把偏心轮都直接连接在电机的输出轴上,或更换电机等,如下图所示:

还可以使用纸黏土、瓦楞纸、彩色卡纸等为它制作螃蟹或蜘蛛的外观。
5. 资料下载
资料内容:样机3D文件
详情请参考:偏心轮连杆简易八足

















 2143
2143

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









