









GCN
拉普拉斯矩阵 = 图的度 - 邻接矩阵。参考链接:拉普拉斯矩阵与拉普拉斯算子的关系
含义:每一行各元素的和为0,即度 = 其他相邻结点数目,假设度 = 3
直观理解每一行:该处结点的能量流出3点,相邻三个结点各流入1点
图拉普拉斯反映了当我们在节点i上施加一个势,这个势以哪个方向能够多顺畅的流向其他节点。
归一化
使得每一行和为1,避免因为某个结点度过大
GCN中的卷积
参考链接:何时能懂你的心——图卷积神经网络(GCN)——侧重理解,并非推导
如何理解 Graph Convolutional Network(GCN)?——清华博士的回答,纯数学,目前看不懂
各层特征提取方法如下
$$
H^{(l+1)}=\sigma\left(\tilde{D}^{-\frac{1}{2}} \tilde{A} \tilde{D}^{-\frac{1}{2}} H^{(l)} W^{(l)}\right)
$$
$$\tilde{A}=A+I$$意义:邻接矩阵没有考虑自身结点特征,+单位矩阵以考虑自身结点
$$\tilde{D}$$为$$\tilde{A}$$的度矩阵(不是A的)
$$\tilde{D}^{-\frac{1}{2}} \tilde{A} \tilde{D}^{-\frac{1}{2}}$$用于归一化$$\tilde{A}$$,使得$$\tilde{A}$$每一行的和都为1,这样可以防止某个结点度过多,最后矩阵相乘时,加权求和的值过大,打乱结点数据的分布。
使用$$\tilde{D}^{-\frac{1}{2}} \tilde{A} \tilde{D}^{-\frac{1}{2}}$$而不是$$\tilde{D}^{-1} \tilde{A}$$是参考了对称归一化拉普拉斯矩阵,可以让得到的矩阵依然对称。
高阶邻近矩阵的计算方法
写在前面
$A^m$的元素意义:如果元素非空就代表,m领域内这些点是可以连通的。也有解释是指:点与点之间走m步能够到达的方案总数。
所以第一代的高阶矩阵直接使用高次幂表示,缺点就是各个位置的权值不同。
MS-G3D就是每一阶只考虑走m步可以刚好达到的位置,所以**具体的实现就是$(A^m>=1)-(A^{m-1}>=1)+I$**,这里和后面的理论结果是一样的。
目前我们使用的邻接矩阵的k次幂来求k阶邻居的计算方式如下:
我们以下面这个例子来进行观察,当我们以节点1分别来求1,2,3阶邻居时,我们会发现相对与k阶邻居来说,距离节点1较近的和度比较大的颜色更深(权重更大),这就是作者说的biased weighting problem。
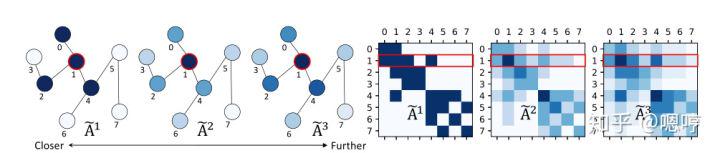
颜色越深表示权重越大
用pytorch计算了一下该矩阵,如下:
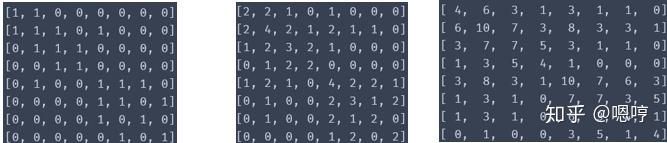
从左到右分别是1阶邻接矩阵,2阶邻接矩阵,3阶邻接矩阵
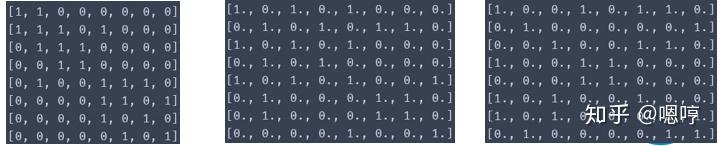
为了解决biased weighting problem,设置新的邻接矩阵
使用了递推的方式,首先设置好A1和A0
然后使用做差来求高阶的邻接矩阵
I指的是自连接矩阵,后面1那部分表示的意思是:将邻接矩阵k次幂得到的矩阵中元素大于1的元素全都变为1
我们可以观察这种方式求k阶邻居的效果如下:我们可以看到除了k阶邻居和节点本身外,其他节点的权重都为0

下面是使用pytorch用作者提出的公式计算得到结果:
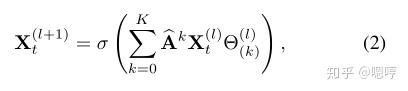
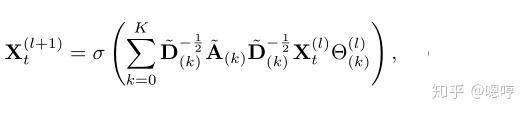
得到下面多尺度的计算公式:
2s-AGCN
改进点
新的注意力机制
st-gcn中是直接按元素乘以注意力掩码$M_k$,这样无法产生不存在的连接,比如手和脚就无法连接。

2s-AGCN是掩膜($B_k,C_k$)直接与邻接矩阵$A_k$相加,就可以产生不存在的连接。

双流——增加新的分支
新分支的输入:骨骼的长度和方向。
首先寻找一个人体骨骼的重心,就是把人胸腔部分作为中心点,因为每个骨骼都有两个点,把靠近中心点的关节看做源关节,远离中心点的关节看做目标关节。所以说关节就是点,骨骼就是从一个点指向另外一个点的向量,向量的长度就是骨骼的长度,向量的方向就是骨骼的方向。
细节:
joint和bone两个分支的网络结构一样。由于bone比joint少一个,添加一个0使其与joint数目一致,注意就可以使用同一个网络结构了
两个网络都得到了评分,直接评分相加,作为最终评分
MS-AGCN
改进点
自适应图卷积
$$
f_{\text {out }}=\sum_{k}^{K_{v}} W_{k} f_{\text {in }}\left(B_{k}+\alpha C_{k}\right)
$$
在$B_k$前添加一个$1-\alpha$:这样
$B_k$初始为$A_k$:这样使用了先验的连接信息,随着训练逐渐会去除这些先验信息,得到合适的自适应邻接矩阵
自适应是指某些参数自适应,比如上面的$\alpha$就是自适应参数
STC注意力模块
SAM:空间注意力机制
TAM:时间注意力机制
CAM:通道注意力机制
都只是用的普通的平均池化,==可以换成CBAM那种==
四流
增加了
前后两帧的关节点位置偏差
前后两帧的骨架向量偏差
MS-G3D
改进点
3D图卷积(同3D卷积)
将串联二维SGCN和TCN,合成了3D的,进而更合理的捕捉跨时空的信息
其中时间维度,使用的空洞卷积,在保证参数量不变的情况下,扩大感受野
同样添加了一个自适应卷积模块,不过是直接和邻接矩阵相加,不像2s-AGCN那么复杂
3D卷积的实现介绍
3D卷积的实现
如原来的NCTV的特征图,由于每次卷积直接使用连续3帧的信息,因此复制前后两帧的特征得到了(NCT,3V)的特征,故相当于有3V个结点,所以A直接复制得到一个(3V,3V)的大矩阵,这样就可以对每一个结点提取到3维空间与其相邻的结点信息。
多尺度实现方法
计算出A的多阶矩阵(1阶矩阵就是与当前结点距离为1的结点),假设需要5阶矩阵,多尺度信息的提取方法就是修改邻接矩阵,将5个5阶矩阵直接拼接为5V×V的大邻接矩阵A_large
A_large与(NCTV)相乘就可以得到NCT,5V的特征,然后view到N,5C,TV,这样特征中就包含了多阶特征的信息。再进行卷积就相当于提取了多尺度特征
参考链接
(MS-AGCN)阅读Skeleton-Based Action Recognition with Multi-Stream Adaptive Graph Convolutional Networks
















 2242
2242











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











