






matlab-B样条轨迹规划-1
七次非均匀B样条轨迹规划,
基于NSGAII的时间-能量-冲击最优。
换上自己的关节值和时间就能用,简单好用,
YID:8625738189588326
云中枫叶舞
标题:基于七次非均匀B样条轨迹规划的时间-能量-冲击最优化算法
摘要:本文提出了一种基于七次非均匀B样条轨迹规划的时间-能量-冲击最优化算法,该算法利用NSGAII优化算法,结合机器人关节值和时间,实现轨迹规划的简便性和易用性。本文首先介绍了B样条曲线的基本概念和特点,然后详细阐述了七次非均匀B样条曲线的建模和计算方法。接着,我们提出了基于NSGAII的时间-能量-冲击最优化算法的设计思路和步骤,并通过实例验证了该算法的有效性和优越性。最后,我们总结了本文的主要工作和创新点,并对未来的研究方向进行了展望。
关键词:七次非均匀B样条曲线,轨迹规划,NSGAII优化算法,时间-能量-冲击最优,机器人关节值
-
引言
随着机器人技术的不断发展,轨迹规划在机器人控制中扮演着重要的角色。传统的轨迹规划方法往往存在计算复杂度高、路径规划不平滑、能耗过大等问题。因此,本文提出了一种基于七次非均匀B样条轨迹规划的时间-能量-冲击最优化算法,旨在提高轨迹规划的效率和性能。 -
B样条曲线介绍
B样条曲线是一种重要的数学工具,常用于表示平滑曲线。它具有局部性、多项式插值性以及逼近性等特点,因此在轨迹规划中具有广泛的应用。七次非均匀B样条曲线是B样条曲线的一种扩展形式,通过调整控制点和节点的位置,可以实现曲线的弯曲和拟合性能。 -
七次非均匀B样条曲线的建模和计算方法
本文以七次非均匀B样条曲线为基础,将机器人关节值和时间作为输入参数,建立了轨迹规划模型。通过对控制点和节点的调整,可以实现轨迹的平滑和拟合性能。同时,本文还介绍了如何利用插值和逼近方法,计算出曲线的具体形状和参数。 -
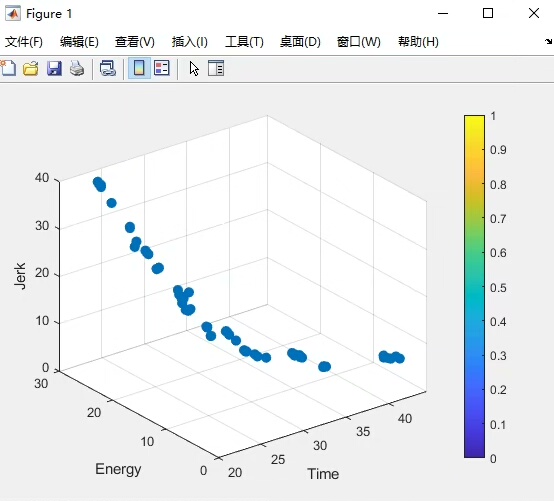
基于NSGAII的时间-能量-冲击最优化算法
为了进一步优化轨迹规划的效果,本文引入了NSGAII优化算法,通过对时间、能量和冲击等指标进行优化,实现轨迹的最优化。具体而言,本文设计了适应度函数、交叉操作和变异操作等步骤,以提高算法的全局搜索能力和收敛速度。 -
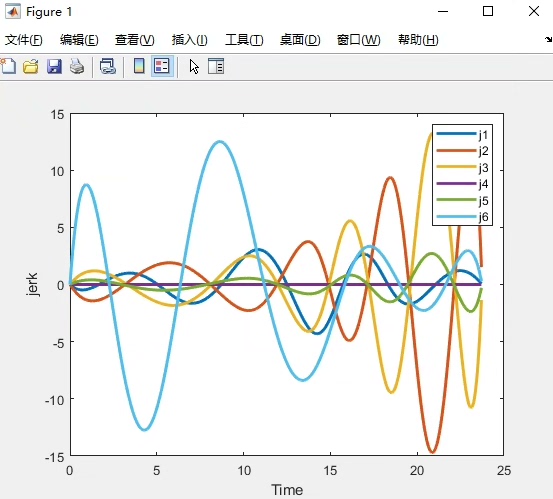
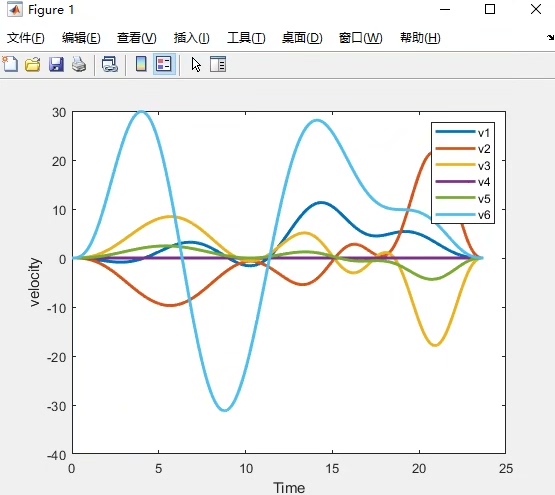
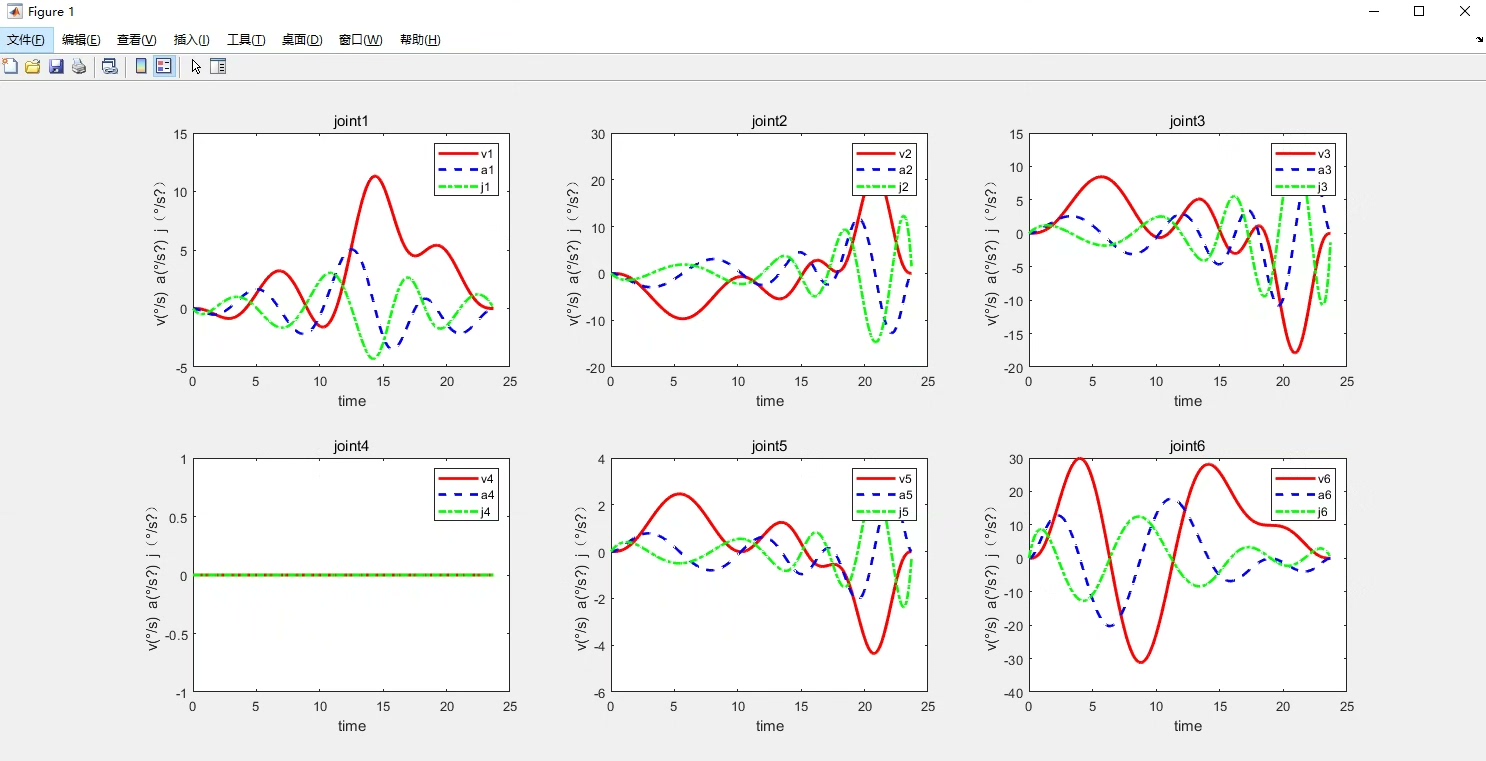
算法实例验证与结果分析
为了验证本文提出的算法的有效性和优越性,我们在实际机器人系统上
相关的代码,程序地址如下:http://nodep.cn/738189588326.html
















 2543
2543

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









