







 本文深入探讨了弦的横振动现象,通过理想化假设建立了物理模型,并利用牛顿第二定律和胡克定律推导出弦振动的基本偏微分方程组。在微小横振动的假设下,进一步简化得到弦的横振动方程,揭示了波的传播速度与弦自身性质的关系。
本文深入探讨了弦的横振动现象,通过理想化假设建立了物理模型,并利用牛顿第二定律和胡克定律推导出弦振动的基本偏微分方程组。在微小横振动的假设下,进一步简化得到弦的横振动方程,揭示了波的传播速度与弦自身性质的关系。
弦的横振动
物理问题:一根弦在内部张力作用下处于平衡位置,某个微小扰动引起部分质点的位移,内部张力又使邻近的部分随之产生位移,形成波的运动。
分析步骤:求解弦的运动,首先要去“去粗存精”,对弦及其运动作“理想化”假设,即建立物理模型。
理想化假设:
- 弦均匀细长,从而其横截面可忽略而视作线,线密度为常数。
- 弦柔软弹性,可任意弯曲,张力满足胡可定律。
- 弦的运动在同一平面内进行,每个质点的位移都是横向的,即垂直于弦的平衡位置,且绝对位移和相对位移都很小。
基本物理定律:
- 牛顿第二定律
- 胡克定律
数学模型:
-
取弦在自身张力作用下的平衡位置所在直线为x轴,横向位移方向为u轴。
-
设t时刻弦上x处的质点相对于平衡位置的横向位移 u = u ( t , x ) u=u(t,x) u=u(t,x)为未知函数。
-
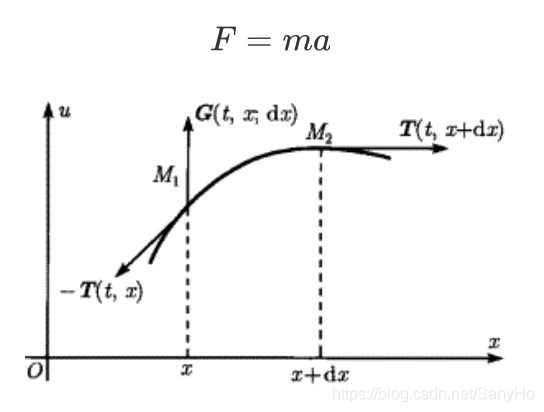
微元分析法:在弦上取微元 [ x , x + d x ] [x,x+dx] [x,x+dx],微分记号 d x dx dx表示一个无穷小改变量。此微元可视作质量为 ρ d x \rho dx ρdx的质点,在他时刻的运动遵循牛顿第二定律。
F = m a F = ma F=ma
-
微元所受的外力有左端点的张力 − T ( t , x ) -T(t,x) −T(t,x),右端点的张力 T ( t , x + d x ) T(t,x+dx) T(t,x+dx),以及加在微元上的垂直于 x x x轴的外力 G ( t , x ; d x ) G(t,x;dx) G(t,x;dx)。
如果线密度 ρ \rho ρ为常数,t时刻作用与x处的单位长度上的外力,即外力密度 g ( t , x ) g(t,x) g(t,x)已知,张力 T ( t , x ) T(t,x) T(t,x)关于x可微,则微元服从的牛顿第二定律可具体表示为
ρ d x ∂ 2 u ∂ t 2 u 。 = − T ( t , x ) + T ( t , x + d x ) + G ( t , x ; d x ) ≈ ∂ T ∂ x d x + g ( t , x ) d x u 。 \rho dx\frac{\partial^2u}{\partial t^2}\bold u^。=-\bold T(t,x)+\bold T(t,x+dx)+\bold G(t,x;dx) \\ \approx \frac{\partial \bold T}{\partial x}dx + g(t,x)dx\bold u^。 ρdx∂t2∂2uu。=−T(t,x)+T(t,x+dx)+G(t,x;dx)≈∂x∂Tdx+g(t,x)dxu。
其中,第二个等号忽略了 d x dx dx的高阶无穷小。其分量形式为
∂ T 1 ∂ x = 0 (1) \frac{\partial T_1}{\partial x}=0 \tag{1} ∂x∂T1=0(1)ρ ∂ 2 u ∂ t 2 = ∂ T 2 ∂ x + g ( t , x ) (2) \rho \frac{\partial ^2u}{\partial t^2}=\frac{\partial T_2}{\partial x}+g(t,x) \tag{2} ρ∂t2∂2u=∂x∂T2+g(t,x)(2)
其中, T 1 , T 2 T_1,T_2 T1,T2分别是张力 T \bold T T在 x 。 \bold x^。 x。和 u 。 \bold u^。 u。方向的分量。这就是弦振动满足的基本偏微分方程组。
由于张力沿弦的切向作用,有第三个方程
T 2 = T 1 ∂ u ∂ x T_2 = T_1\frac{\partial u}{\partial x} T2=T1∂x∂u
代入(1)式、(2)式,便可化简得
ρ ∂ 2 u ∂ t 2 = T 1 ( t ) ∂ 2 x ∂ x 2 + g ( t , x ) (3) \rho \frac{\partial^2u}{\partial t^2}=T_1(t)\frac{\partial^2x}{\partial x^2}+g(t,x) \tag{3} ρ∂t2∂2u=T1(t)∂x2∂2x+g(t,x)(3)
在微小横振动的假设下, ∣ ∂ u ∂ x ∣ < < 1 |\frac{\partial u}{\partial x}|<<1 ∣∂x∂u∣<<1,张力大小
T = T 1 2 + T 2 2 = T 1 1 + ( ∂ u ∂ x ) 2 ≈ T 1 T=\sqrt{T_1^2+T_2^2}=T_1\sqrt{1+(\frac{\partial u}{\partial x})^2} \approx T_1 T=T12+T22=T11+(∂x∂u)2≈T1
微元弧长
d s = d x 2 + d u 2 = d x 1 + ( ∂ u ∂ x ) 2 ≈ d x ds=\sqrt{dx^2+du^2}=dx\sqrt{1+(\frac{\partial u}{\partial x})^2}\approx dx ds=dx2+du2=dx1+(∂x∂u)2≈dx
在运动过程中,微元弧长保持不变,由胡克定律知,张力大小 T ≈ T 1 T\approx T_1 T≈T1也不随时间变化,从而 T ≈ T 1 T\approx T_1 T≈T1为常数,(3)式改写为
∂ 2 u ∂ t 2 = a 2 ∂ 2 u ∂ x 2 + f ( t , x ) , a = T ρ , f ( t , x ) = g ( t , x ) ρ (4) \frac{\partial^2u}{\partial t^2}=a^2\frac{\partial^2u}{\partial x^2}+f(t,x), \quad a=\sqrt{\frac{T}{\rho}},\quad f(t,x)=\frac{g(t,x)}{\rho} \tag{4} ∂t2∂2u=a2∂x2∂2u+f(t,x),a=ρT,f(t,x)=ρg(t,x)(4)
称为弦的横振动方程。其中,系数 a a a反映波的传播速度,由弦本身性质决定; f ( t , x ) f(t,x) f(t,x)则是作用在弦身单位质量上的外力,当弦自由振动是, f ( t , x ) ≡ 0 f(t,x)\equiv 0 f(t,x)≡0
总结:推导方程的过程,实际上就是将微元运动满足的物理定律翻译成用已知函数、未知函数及其偏导数表示的数学式子。
推广:凡是弹性介质中微小扰动的传播问题,如弹性杆的纵振动、弹性膜的横振动、声波在空气中的传播等,都可用类似方法导出同一类型的方程,一般表示为
∂
2
u
∂
t
2
=
a
Δ
u
+
f
(
t
,
x
)
,
x
=
(
x
1
,
x
2
,
.
.
.
,
x
n
)
,
n
=
1
,
2
,
3
(5)
\frac{\partial^2 u}{\partial t^2}=a\Delta u +f(t,x), \quad x=(x_1,x_2,...,x_n), \quad n=1,2,3 \tag{5}
∂t2∂2u=aΔu+f(t,x),x=(x1,x2,...,xn),n=1,2,3(5)
其中,
Δ
=
∑
j
=
1
n
∂
2
∂
x
j
2
\Delta=\sum_{j=1}^n\frac{\partial^2}{\partial x_j^2}
Δ=∑j=1n∂xj2∂2为拉普拉斯算子。此类方程称为波动方程,弦振动方程(4)被称为一维波动方程。而对于固体弹性波方程、流体波方程、电磁波方程等。在一些重要的特殊情况下,可约化为波动(5)。
思考:弦振动方程(3)是在一定的理想化假设下导出的。如果存在其他不能忽略的因素,比如弦在粘稠液体中振动,阻尼必须考虑,推出的方差中就会增加 α ∂ u ∂ t \alpha \frac{\partial u}{\partial t} α∂t∂u项。故任何数学模型都是相对的,超出一定范围,则需要建立新的模型。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









