






(文献+程序)基于非线性干扰观测器的自适应滑模反演控制
机械臂模型 神经网络 matlab仿真 滑膜
带原班文献
ID:7939719622416582
南唐著名地椒糖
在机器人控制领域,滑模控制是一种常用且有效的控制方法,能够实现对非线性系统的鲁棒控制。然而,传统的滑模控制方法存在参数不确定性和外部干扰的问题,这限制了其在实际应用中的稳定性和精确性。针对这一问题,研究者们提出了基于非线性干扰观测器的自适应滑模反演控制方法。
首先,我们需要建立机械臂的模型。机械臂是一种常见的工业机器人,由多个关节组成。在进行控制时,我们需要对机械臂的运动进行建模,以便进行仿真和控制算法设计。在建立机械臂模型时,我们可以采用神经网络的方法,通过对机械臂运动数据的学习和拟合,得到一个准确的模型。
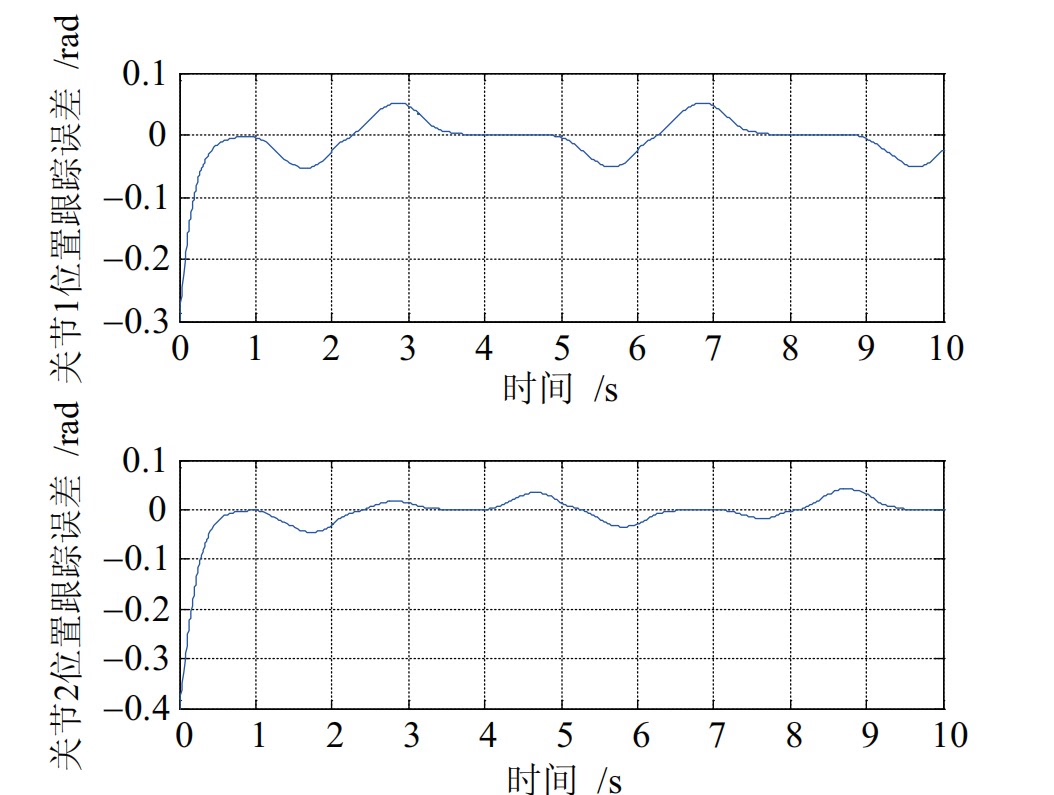
然后,我们可以利用Matlab进行仿真,验证自适应滑模反演控制方法的有效性。Matlab作为一种强大的仿真工具,提供了丰富的函数库和工具箱,可以方便地进行系统建模、控制算法设计和仿真实验。在仿真过程中,我们可以使用机械臂模型和自适应滑模反演控制方法,通过对不同情况下的仿真结果进行分析和比较,评估控制方法的性能和鲁棒性。
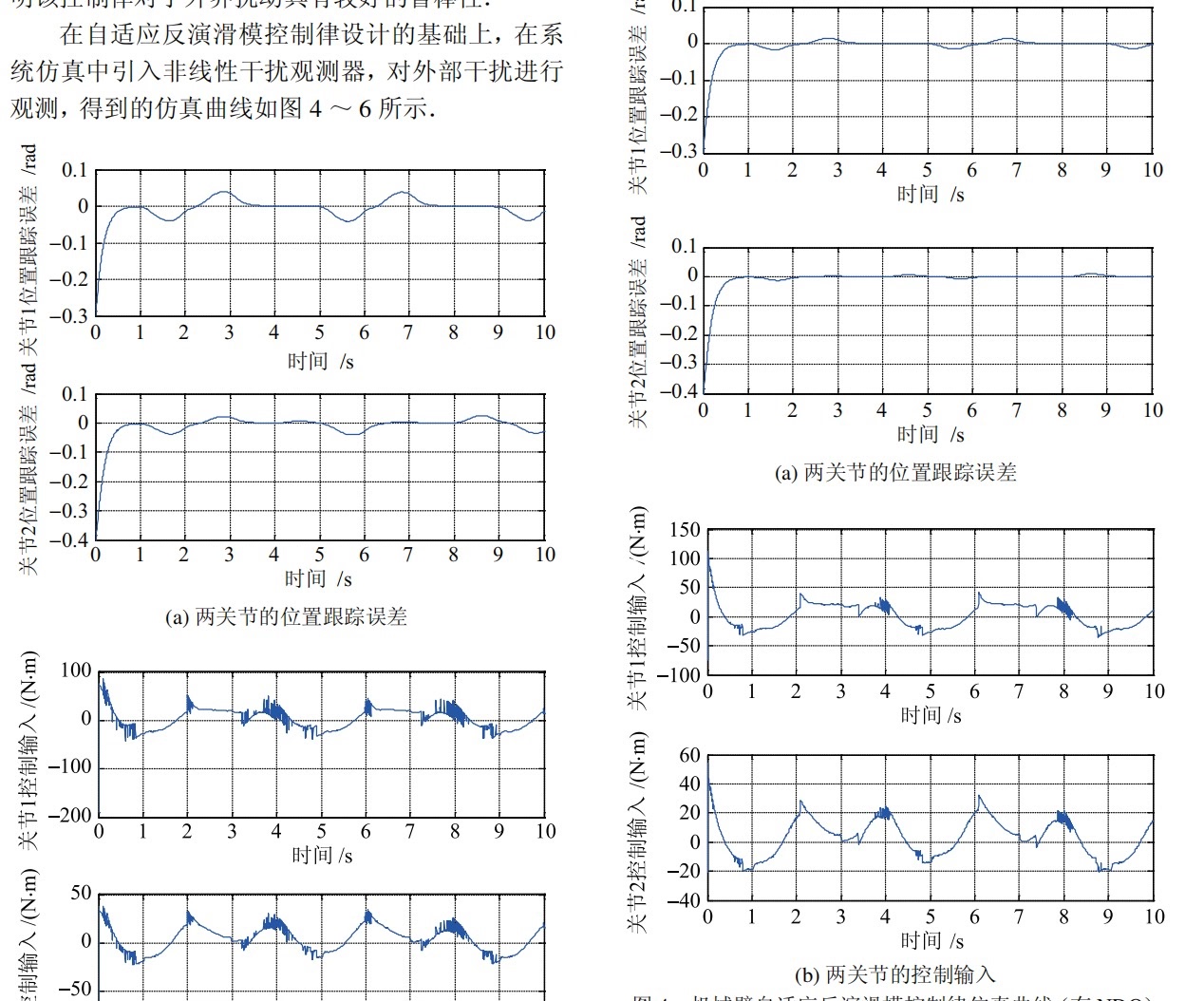
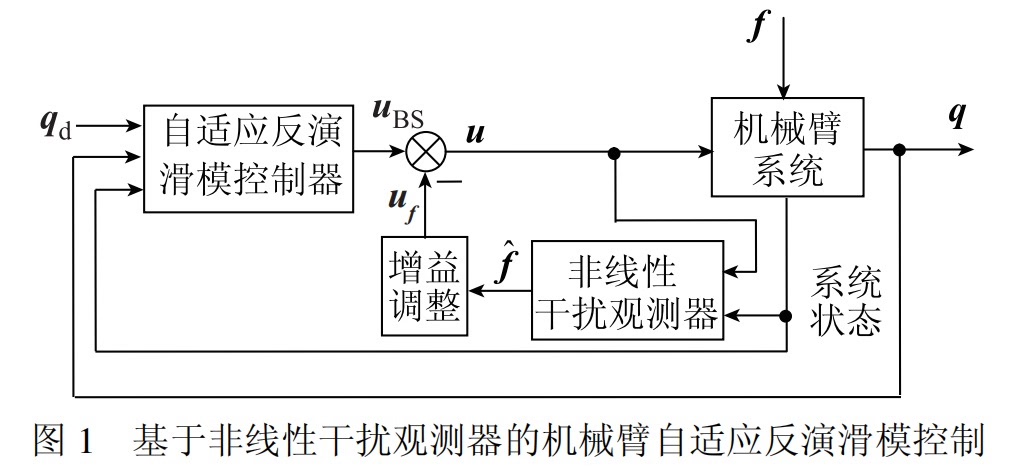
在自适应滑模反演控制方法中,非线性干扰观测器起到了关键作用。非线性干扰观测器通过观测和估计系统的非线性干扰,将其引入控制器中进行补偿,从而提高系统的鲁棒性和控制性能。该方法具有良好的适应性和抗干扰能力,能够有效地应对系统的非线性和外部干扰。
滑模控制方法中的滑膜(sliding mode)是一种通过引入一个虚拟面来实现对系统状态的约束的技术。滑膜可以将系统状态推向所期望的工作区域,并实现对系统状态的鲁棒跟踪和鲁棒控制。在自适应滑模反演控制中,滑膜用于引导系统状态到目标状态,并通过自适应机制调整滑膜的参数,以适应不确定性和干扰的变化。
综上所述,基于非线性干扰观测器的自适应滑模反演控制方法在机器人控制中具有重要的应用价值。通过建立机械臂模型、采用神经网络算法进行模型学习和拟合,利用Matlab进行仿真实验,我们可以验证该方法的有效性,并对其进行分析和评估。这将有助于提高机器人控制的鲁棒性和精确性,推动机器人技术在工业生产和生活中的广泛应用。
以上相关代码,程序地址:http://wekup.cn/719622416582.html















 949
949











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









