








十三、基于干扰观测器的双关节机械臂的滑模控制
13.1 双关节机械臂模型
设计两关节机械臂模型动态方程为:
(13.1)
由于前几篇博客中已经给出公式中变量的相关定义,在这里不再赘述。直接进入下文。
13.2 干扰观测器的设计
基于前文的单力臂机械臂的干扰观测器设计方案,在这里为双关节机械臂设计干扰观测器,即在原有系统输出转角的基础上,加入另一个输出转角,即为双关节的两个转角。
定义跟踪误差为:
(13.2)
定义误差函数为:
(13.3)
其中。
针对被控对象式(13.1),设计滑模控制率为
上式仿照单关节的滑模控制律公式,将单关节改为双关节,即把一个变量变为两个变量,也就是二维向量。
其中为通过干扰观测器对
项的估计值,
为
项的估计误差。
设计干扰观测器为
其中为对干扰
的估计,
为对
的估计,
,
和
为通过极点配置的增益。
干扰观测器表示为
在这里只需要增添第二个关节,即可得到两个关节基于干扰观测器的公式。
13.3 仿真实例
仿真结果如图所示。
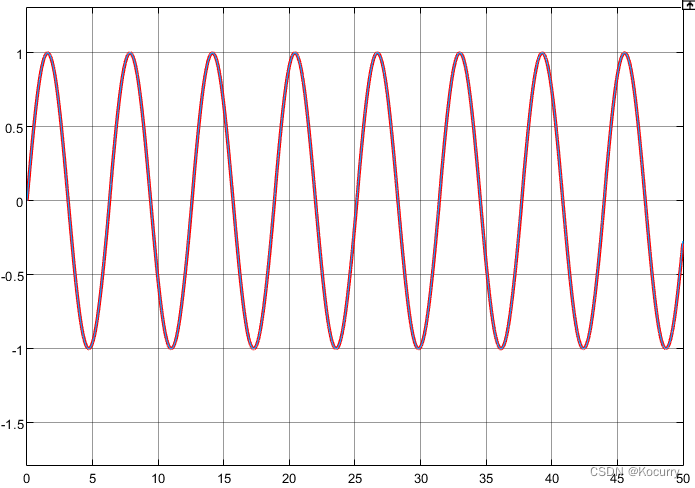
图1 关节1轨迹跟踪
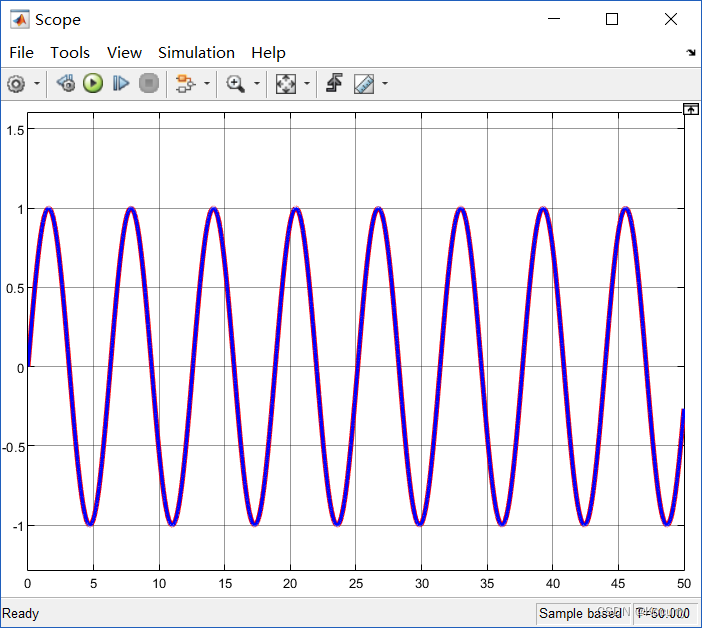
图2 关节2轨迹跟踪
由上图可见,红线和蓝线分别为关节的期望角度和实际角度,在调节好相关物理参数的条件下,可以看见图中关节的轨迹跟踪情况很好,也就说明干扰观测器的设计达到预期。

图3 simulink仿真图















 7371
7371











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









