







文件系统
MicroPyhon的文件系统是FatFS。
根目录
路径都是以根目录为起点。
当插入sd卡后,根目录就是SD卡;不插入sd卡,根目录就是内置的Flash。
如果需要,你可以在SD卡上,新建一个空文件:/flash/SKIPSD,这会避免挂载SD卡,当然,你可以使用os.mount来手动挂载SD卡。
绝对路径与相对路径
绝对路径是以根目录为起点的,相对路径是以当前目录为起点的。
比如:
image.save("/example.jpg")
中的"/example.jpg"就是绝对路径。会存放在根目录/下。
比如:
image.save("./pic/example.jpg")
image.save("pic/example.jpg")
这就是相对路径,表示当前路径下的pic文件夹下的example.jpg文件。
MicroPython的文件读写
Python学习(九)IO 编程 —— 文件读写 - feesland - 博客园
MicroPython的OS模块
在代码中,可以使用os库,来进行新建目录,新建文件之类的操作。
-
os.listdir([dir])
如果没有参数,列出当前目录。如果给了参数,就列出参数所代表的目录。 -
os.chdir(path)
改变当前目录 -
os.getcwd()
获得当前目录 -
os.mkdir(path)
新建一个新的目录 -
os.remove(path)
删除文件 -
os.rmdir(path)
删除目录 -
os.rename(old_path, new_path)
重命名文件 -
os.stat(path)
获得文件或者路径的状态
OpenMV的默认文件
默认情况下,OpenMV的磁盘有三个文件。
-
main.py
上电自动运行这个文件的代码。 -
openmv.inf
windows驱动文件。 -
README.txt
可以简单看一下。
模块的使用
什么是模块?
随着代码的增多,在一个文件里的代码会越来越长,越来越难看懂。
为了编写可维护的代码,我们把很多函数分组,放到不同的文件里。在Python中,一个.py文件就称之为一个模块(Module)。
模块有什么好处?复用代码方便!如果我写了一个模块,你也写了一个模块,我们就有了两个模块。我们把这些模块都组织起来,大家就可以少写很多代码了!
如何使用模块?
import machine
red_led = machine.LED("LED_RED")
red_led.on()import machine就是引入machine这个模块。通过import语句,就可以引入模块。
还有from xxx import ooo 的语句,意思是通过xxx模块引入ooo类,或者通过xxx模块引入ooo函数。比如上面的程序可以写成:
from machine import LED
red_led = LED("LED_RED")
red_led.on()这就是通过machine的模块来引入LED类了。
如何添加自定义模块?
之前我们提到了,OpenMV是有文件系统的。
文件系统的根目录存在一个main.py,代码执行的当前目录就是根目录。
所以我们把模块的文件复制到OpenMV的“U盘”里就可以。如图:
这里的pid.py只是举一个举例。
我把pid.py复制到了U盘的根目录下。那么在程序中:
import pid就可以引入pid模块了了。或者通过:
from pid import PID这就是引入了PID类。
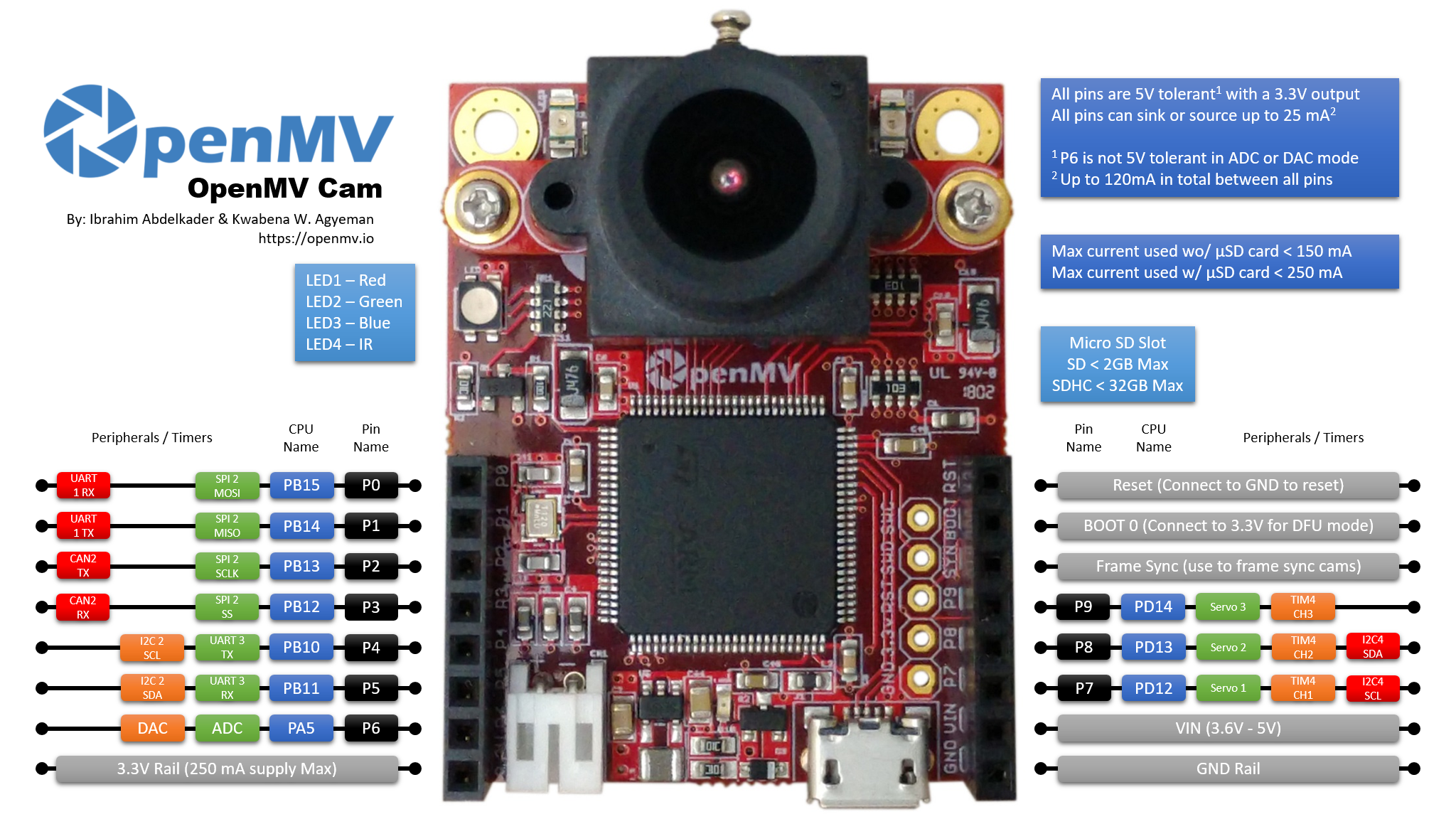
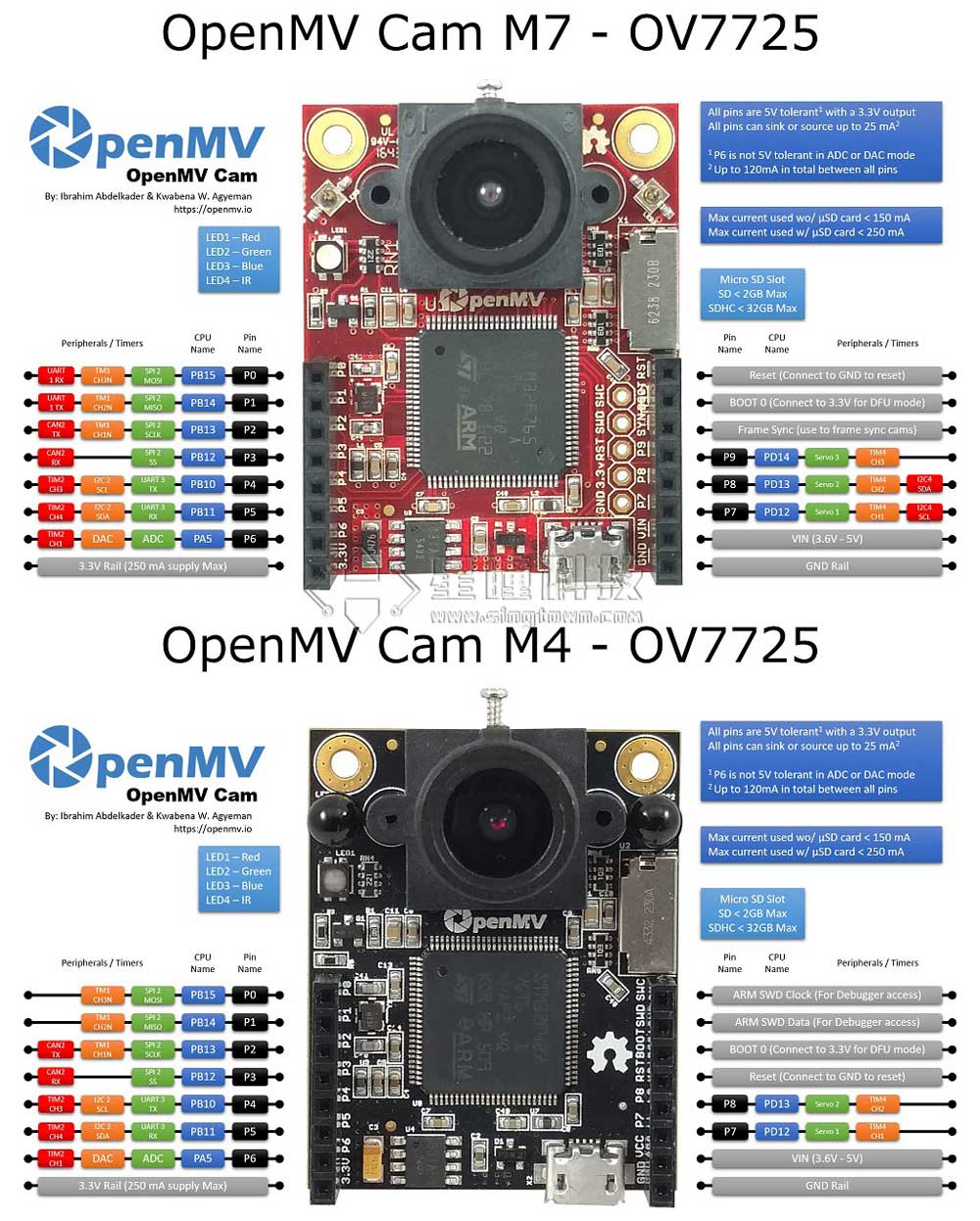
pyb各种外设
概览
作为一个单片机,控制IO口,IIC,SPI,CAN,PWM。定时器当然都是可以的。
而且,使用python语言,可以非常简单的调用它们,而不用考虑寄存器。
| Tables | OpenMV2 M4 | OpenMV3 M7 | OpenMV4 H7 | OpenMV4 H7 Plus | OpenMV RT1062 |
|---|---|---|---|---|---|
| Pin | 9 | 10 | 10 | 10 | 14 |
| ADC | 1 | 1 | 1 | 1 | 1 |
| DAC | 1 | 1 | 1 | 1 | 0 |
| SPI | 1 | 1 | 1 | 1 | 1 |
| I2C | 1 | 2 | 2 | 2 | 1 |
| UART | 1 | 2 | 2 | 2 | 1 |
| Servo | 2 | 3 | 3 | 2 | 4 |
| CAN bus | 0 | 1 | 1 | 1 | 1 |
| 电源按键 | 0 | 0 | 0 | 0 | 1 |
| 自定义按键 | 0 | 0 | 0 | 0 | 1 |
| 引脚耐受 | 5V | 5V | 5V | 5V | 3.3V |
| 引脚电平 | 3.3V | 3.3V | 3.3V | 3.3V | 3.3V |
| IC | STM32F427 | STM32F765 | STM32H743 | STM32H743 | IMXRT1062 |
| RAM | 256KB | 512KB | 1MB | 32MB + 1MB | 32MB + 1MB |
| Flash | 1MB | 2MB | 2MB | 32MB + 2MB | 16MB |
| 频率 | 180MHz | 216MHZ | 480MHZ | 480MHZ | 600MHZ |
| 标配感光元件 | OV7725(30W像素) | OV7725(30W像素) | OV7725(30W像素) | OV5640(500W像素) | OV5640(500W像素) |
注意:因为MicroPython可以在很多平台上运行。最开始在pyb模块,pyboard,是基于STM32的,但是后来又加入了esp8266和esp32,以及nrf系列,他们的架构和STM32不同。所以官方统一制定了machine模块,所以通用性更高一些,最终pyb会被淘汰。
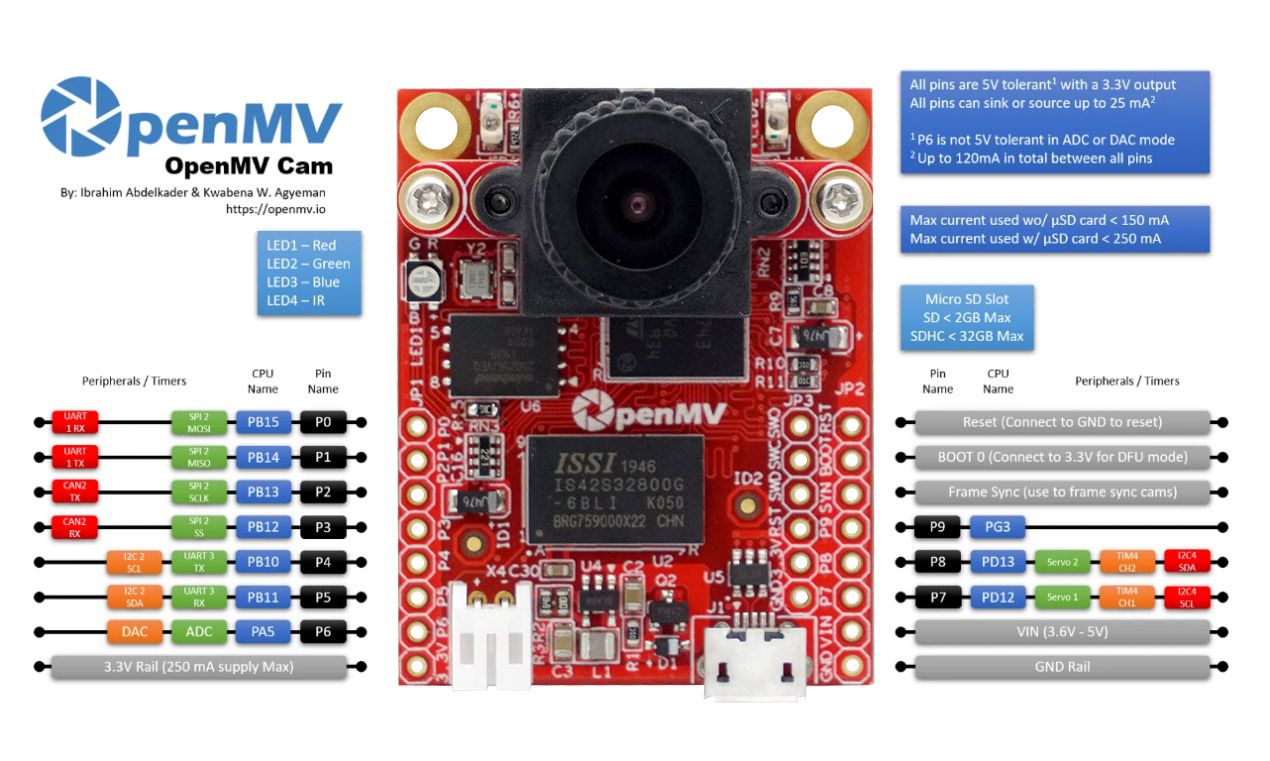
OpenMV4 H7 Plus / OpenMV4 H7 / OpenMV3,主控为STM32,一般用pyb模块。
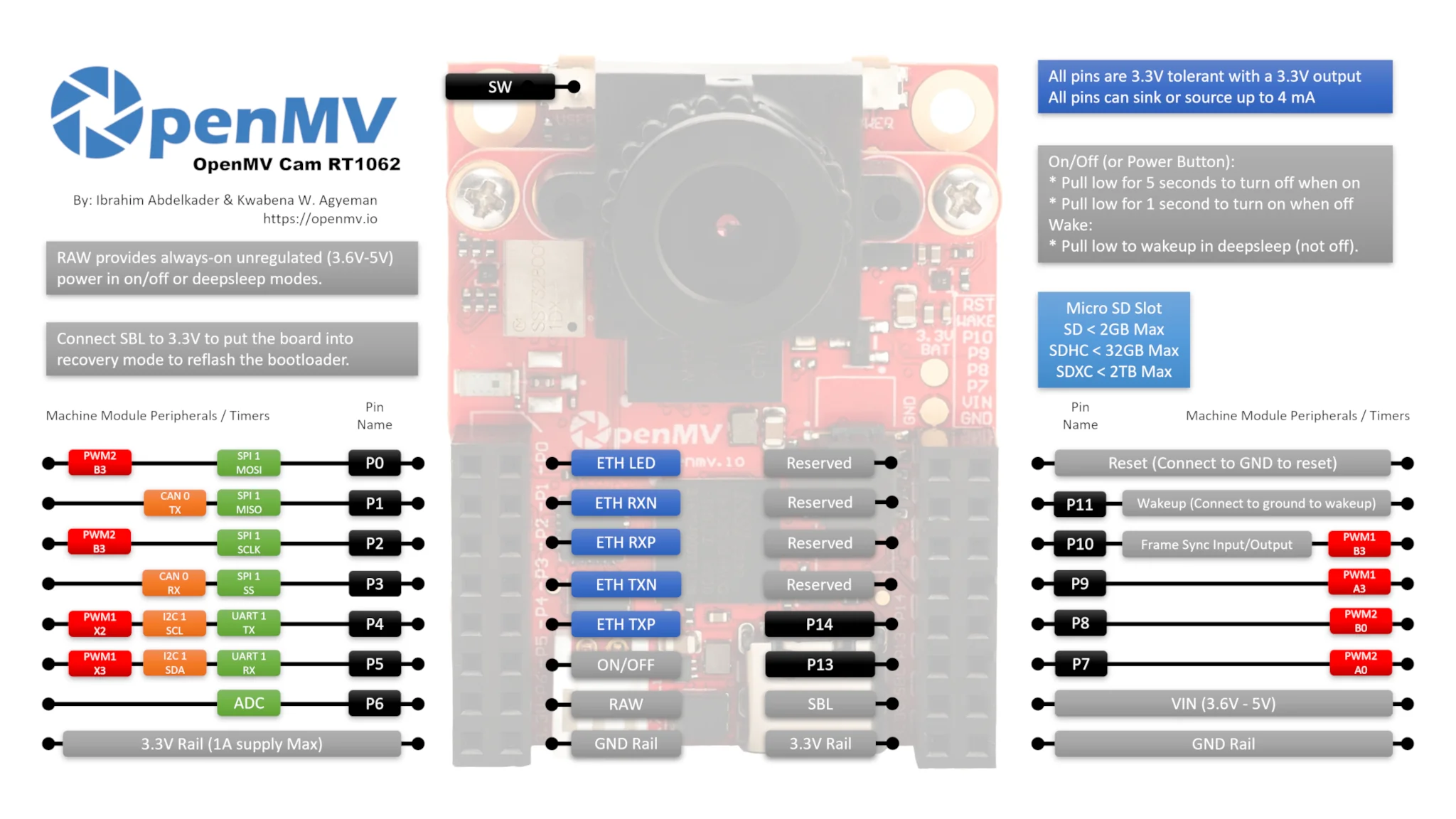
2024年最新款的OpenMV RT1062,主控为IMXRT1062,只支持machine模块,不支持pyb模块。请使用对应的machine代码哦~
常用的函数
pyb.delay(50) # 延时 50 毫秒
pyb.millis() # 获取从启动开始计时的毫秒数LED
from pyb import LED
led = LED(1) # 红led
led.toggle()
led.on()#亮
led.off()#灭LED(1) -> 红LED
LED(2) -> 绿LED
LED(3) -> 蓝LED
LED(4) -> 红外LED,两个
在 OpenMV RT 上不能用pyb模块,只能使用以下machine模块:
from machine import LED
import time
red_led = LED("LED_RED")
green_led = LED("LED_GREEN")
blue_led = LED("LED_BLUE")
blue_led.off()
green_led.off()
red_led.off()
while(1):
green_led.toggle()
red_led.on()
time.sleep_ms(250)
red_led.off()
time.sleep_ms(250)IO
from pyb import Pin
p_out = Pin('P7', Pin.OUT_PP)#设置p_out为输出引脚
p_out.high()#设置p_out引脚为高
p_out.low()#设置p_out引脚为低
p_in = Pin('P7', Pin.IN, Pin.PULL_UP)#设置p_in为输入引脚,并开启上拉电阻
value = p_in.value() # get value, 0 or 1#读入p_in引脚的值在 OpenMV RT 上不能用pyb模块,只能使用以下machine模块:
from machine import Pin
p_out = Pin("P7", Pin.OUT)#设置p_out为输出引脚
p_out.high()#设置p_out引脚为高
p_out.low()#设置p_out引脚为低
p_in = Pin("P8", Pin.IN, Pin.PULL_UP)#设置p_in为输入引脚,并开启上拉电阻
value = p_in.value() # get value, 0 or 1#读入p_in引脚的值
CopyServo
视频教程34 - OpenMV控制三个舵机:OpenMV控制3个舵机 | 星瞳科技
from pyb import Servo
s1 = Servo(1) # servo on position 1 (P7)
s1.angle(45) # move to 45 degrees
s1.angle(-60, 1500) # move to -60 degrees in 1500ms
s1.speed(50) # for continuous rotation servos- Servo(1) -> P7 (PD12)
- Servo(2) -> P8 (PD13)
OpenMV3 M7 / OpenMV4 H7上增加:
- Servo(3) -> P9 (PD14)
注意:OpenMV4 H7 Plus P9不能使用PWM
OpenMV RT1062 有P7 P8 P9 P10 四个PWM引脚。 在 OpenMV RT 上不能用pyb模块,只能使用以下machine模块:
# 舵机控制例子
#
# 这个例子展示了如何使用OpenMV来控制舵机
#
# 伺服系统需要 50 Hz PWM,脉冲宽度为 1000us 至 2000us。
import time
from machine import PWM
# P7 和 P8 可以共享相同的 PWM module,它们需要具有相同的频率。
p7 = PWM("P7", freq=50, duty_ns=(2000 * 1000))
p8 = PWM("P8", freq=50, duty_ns=(2000 * 1000))
# P9 和 P10 可以共享相同的 PWM module,它们需要具有相同的频率。
p9 = PWM("P9", freq=50, duty_ns=(2000 * 1000))
p10 = PWM("P10", freq=50, duty_ns=(2000 * 1000))
while True:
for i in range(1000, 2000, 100):
p7.duty_ns(i * 1000)
p8.duty_ns(i * 1000)
p9.duty_ns(i * 1000)
p10.duty_ns(i * 1000)
time.sleep_ms(1000)
for i in range(2000, 1000, -100):
p7.duty_ns(i * 1000)
p8.duty_ns(i * 1000)
p9.duty_ns(i * 1000)
p10.duty_ns(i * 1000)
time.sleep_ms(1000)IO中断
from pyb import Pin, ExtInt
callback = lambda e: print("intr")
ext = ExtInt(Pin('P7'), ExtInt.IRQ_RISING, Pin.PULL_NONE, callback)在 OpenMV RT 上不能用pyb模块,只能使用以下machine模块:
from machine import Pin
import time
pin0 = Pin("P0", Pin.IN, Pin.PULL_UP)
callback = lambda e: print("intr")
pin0.irq(callback, Pin.IRQ_FALLING)
while True:
time.sleep(1)定时器
from pyb import Timer
tim = Timer(4, freq=1000)
tim.counter() # get counter value
tim.freq(0.5) # 0.5 Hz
tim.callback(lambda t: pyb.LED(1).toggle())Timer 1 Channel 3 Negative -> P0
Timer 1 Channel 2 Negative -> P1
Timer 1 Channel 1 Negative -> P2
Timer 2 Channel 3 Positive -> P4
Timer 2 Channel 4 Positive -> P5
Timer 2 Channel 1 Positive -> P6
Timer 4 Channel 1 Negative -> P7
Timer 4 Channel 2 Negative -> P8
OpenMV M7上增加:
Timer 4 Channel 3 Positive -> P9
在 OpenMV RT 上不能用pyb模块,只能使用以下machine模块:
from machine import LED
from machine import Timer
blue_led = LED("LED_BLUE")
# 当被调用时,我们将返回timer对象
# 注意:在回调中不允许分配内存的函数
def tick(timer):
blue_led.toggle()
# machine模块目前仅支持-1虚拟定时器。
tim = Timer(-1, freq=1, callback=tick) # 创建一个定时器对象—以1Hz触发PWM
from pyb import Pin, Timer
p = Pin('P7') # P7 has TIM4, CH1
tim = Timer(4, freq=1000)
ch = tim.channel(1, Timer.PWM, pin=p)
ch.pulse_width_percent(50)在 OpenMV RT 上不能用pyb模块,只能使用以下machine模块:
from machine import PWM
import time
p7 = PWM("P7", freq=100, duty_u16=32768)
while True:
for i in range(0, 65536, 256):
p7.duty_u16(65535 - i)
time.sleep_ms(10)
p7.duty_u16(32768)ADC
from pyb import Pin, ADC
adc = ADC('P6')
adc.read() # read value, 0-4095在 OpenMV RT 上不能用pyb模块,只能使用以下machine模块:
from machine import ADC
adc = ADC('P6')
adc.read_u16()DAC
from pyb import Pin, DAC
dac = DAC('P6')
dac.write(120) # output between 0 and 255UART
from pyb import UART
uart = UART(3, 9600)
uart.write('hello')
uart.read(5) # read up to 5 bytesUART 3 RX -> P5 (PB11)
UART 3 TX -> P4 (PB10)
OpenMV3 M7 / OpenMV4 H7/ OpenMV4 H7 Plus上增加:
UART 1 RX -> P0 (PB15)
UART 1 TX -> P1 (PB14)
在 OpenMV RT 上不能用pyb模块,只能使用以下machine模块:
from machine import UART
uart = UART(1, 9600)
uart.write('hello')
uart.read(5) # read up to 5 bytesOpenMV RT1062只有串口1,对应 P4 P5 引脚。 UART 1 RX -> P5 (PB11)
UART 1 TX -> P4 (PB10)
SPI
from pyb import SPI
spi = SPI(2, SPI.MASTER, baudrate=200000, polarity=1, phase=0)
spi.send(b'hello')
spi.recv(5) # receive 5 bytes on the bus
spi.send_recv(b'hello') # send a receive 5 bytes在 OpenMV RT 上不能用pyb模块,只能使用以下machine模块:
from machine import SPI
spi = SPI(1, baudrate=int(1000000000 / 66), polarity=0, phase=0)
spi.write(b'hello')
spi.read(5) # receive 5 bytes on the bus
txdata = b"12345678"
rxdata = bytearray(len(txdata))
spi.write_readinto(txdata, rxdata) # Simultaneously write and read bytes.I2C
from machine import I2C, Pin
i2c = I2C(sda=Pin('P5'),scl=Pin('P4'))
i2c.scan()
i2c.writeto(0x42, b'123') # write 3 bytes to slave with 7-bit address 42
i2c.readfrom(0x42, 4) # read 4 bytes from slave with 7-bit address 42
i2c.readfrom_mem(0x42, 8, 3) # read 3 bytes from memory of slave 42,
# starting at memory-address 8 in the slave
i2c.writeto_mem(0x42, 2, b'\x10') # write 1 byte to memory of slave 42
# starting at address 2 in the slaveI2C 2 SCL (Serial Clock) -> P4 (PB10)
I2C 2 SDA (Serial Data) -> P5 (PB11)
OpenMV3 M7 / OpenMV4 H7 / OpenMV4 H7 Plus上增加:
I2C 4 SCL (Serial Clock) -> P7 (PD13)
I2C 4 SDA (Serial Data) -> P8 (PD12)
machine库是软件模拟的I2C协议,所以使用任何引脚都可以,但是还是推荐使用上面所说的引脚。
在 OpenMV RT 上可以这样调用:
from machine import I2C, Pin
i2c = I2C(1)
i2c.scan()
i2c.writeto(0x42, b'123') # write 3 bytes to slave with 7-bit address 42
i2c.readfrom(0x42, 4) # read 4 bytes from slave with 7-bit address 42
i2c.readfrom_mem(0x42, 8, 3) # read 3 bytes from memory of slave 42,
# starting at memory-address 8 in the slave
i2c.writeto_mem(0x42, 2, b'\x10') # write 1 byte to memory of slave 42
# starting at address 2 in the slaveSwitch Pin 自定义按键SW
# OpenMV Cam 上的用户开关可通过“SW”引脚读取。
# 该引脚通过 RC 电路在硬件中进行去抖。
# 因此,您只需读取引脚状态即可了解开关是否被按下。
import machine
sw = machine.Pin("SW", machine.Pin.IN)
r = machine.LED("LED_RED")
while True:
r.value(not sw.value())
print(sw.value())仅OpenMV RT具有SW自定义按键,OpenMV4 H7 / OpenMV4 H7 Plus / OpenMV3 M7 没有自定义按键。
字符串简介json/正则
介绍
在传统的单片机应用中,两个单片机串口通信,都是自己定义一些帧,包括帧头,数据帧,校验帧,帧尾。 图中 是飞控MavLink的协议。
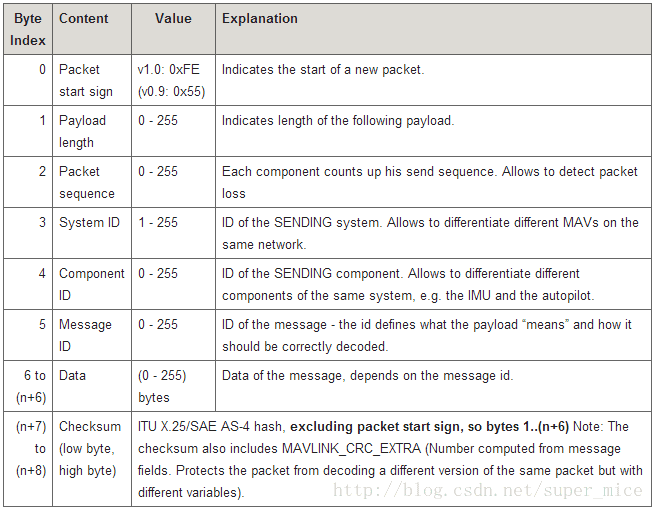
这种方式,稳定,高效。缺点也很明显:开发难度稍大,需要自己制定协议,编码解码需要手动编写。如果想快速尝试两个单片机通信的。我推荐使用串口传输json字符串!
优点:不需要了解底层的事情,比如:
- 不考虑大端小端
- 不考虑数据的byte转换
- 支持任意长的int,float
- 简单易懂,容易开发。
缺点:效率稍低。json的编码和解码会占用cpu。
其实传输json在网络编程中已经成为标准,比如在restful api中,前端和后端使用json来获取信息。只是在传统单片机的领域中不常见,一方面是效率稍低,嵌入式通常对成本的控制要求比较高。但是随着芯片成本的降低,很多应用对物料成本要求不是很高了,对开发效率越来越重视。
字符串
string = "hello string!"OpenMV 是可以直接通过串口发送字符串的。
from machine import UART
uart = UART(1, 9600)
string = "hello string!"
uart.write(string)字符串操作
举个例子:
blobs=[12,23,11,22,33,44]
print("%d", blobs[3])JSON
JSON是一种简洁高效的交换数据的格式。 它可以是这种简单的:
"[[12,0],[10,12],[22,10],[99,11]]"注:我通过这种简单的字符串,把OpenMV中的色块的x,y坐标发送出去。
也可以是这种复杂的:('''在python中表示多行字符串)
'''
{
"number":10,
"color" :[255,0,0],
"rate" :0.65
}
'''我使用这种结构把OpenMV采集到的颜色信息发送到wifi中的服务器中。
甚至于,可以像这样:
'''
{
"firstName": "John",
"lastName": "Smith",
"sex": "male",
"age": 25,
"address":
{
"streetAddress": "21 2nd Street",
"city": "New York",
"state": "NY",
"postalCode": "10021"
},
"phoneNumber":
[
{
"type": "home",
"number": "212 555-1234"
},
{
"type": "fax",
"number": "646 555-4567"
}
]
}
'''注意:json的形式和Python很像,但是json是javascript的对象表达形式,和python的表达形式稍有不同。
python生成json
OpenMV有json的模块,json.dumps(obj)和ujson.loads(str)可以很容的生成json字符串和解析json字符串。
import json
obj = [[12,0],[10,12],[22,10],[99,11]]
print(json.dumps(obj))
obj = {
"number":10,
"color" :[255,0,0],
"rate" :0.65
}
print(json.dumps(obj))会输出:
'[[12, 0], [10, 12], [22, 10], [99, 11]]'
'{"color": [255, 0, 0], "number": 10, "rate": 0.65}'然后把字符串通过串口发送出去,然后在另一端,把json字符串解析成对象/数组。然后进行接下来的逻辑操作。
其他单片机的json模块
json很简单也很通用。
- Arduino: GitHub - bblanchon/ArduinoJson: 📟 JSON library for Arduino and embedded C++. Simple and efficient.
- STM32: 【STM32】使用keil提供的JSON库——Jansson_keil.jansson-CSDN博客
-
MicroPython(pyboard,esp8266,samd21): json – JSON encoding and decoding — MicroPython latest documentation
-
NodeMCU(esp8266): https://nodemcu.readthedocs.io/en/master/en/modules/sjson/
你可以利用这些库,把json字符串转换成对象。
电脑其他语言的json模块
基本所有的语言都支持json(连lisp都有)。。。所以可以很容易的进行通信。
正则表达式
如果是一些简单的字符串处理,使用python内置的一些功能就可以,但是对于复杂一些的需求,就需要使用正则表达式了。
比如URL处理中。(此处在OpenMV中使用不多)















 1029
1029

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









