







✅博主简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,Matlab项目合作可私信。
🍎个人主页:海神之光
🏆代码获取方式:
海神之光Matlab王者学习之路—代码获取方式
⛳️座右铭:行百里者,半于九十。
更多Matlab仿真内容点击👇
Matlab图像处理(进阶版)
路径规划(Matlab)
神经网络预测与分类(Matlab)
优化求解(Matlab)
语音处理(Matlab)
信号处理(Matlab)
车间调度(Matlab)
⛄一、A_star算法简介
1 A Star算法及其应用现状
进行搜索任务时提取的有助于简化搜索过程的信息被称为启发信息.启发信息经过文字提炼和公式化后转变为启发函数.启发函数可以表示自起始顶点至目标顶点间的估算距离, 也可以表示自起始顶点至目标顶点间的估算时间等.描述不同的情境、解决不同的问题所采用的启发函数各不相同.我们默认将启发函数命名为H (n) .以启发函数为策略支持的搜索方式我们称之为启发型搜索算法.在救援机器人的路径规划中, A Star算法能结合搜索任务中的环境情况, 缩小搜索范围, 提高搜索效率, 使搜索过程更具方向性、智能性, 所以A Star算法能较好地应用于机器人路径规划相关领域.
2 A Star算法流程
承接2.1节, A Star算法的启发函数是用来估算起始点到目标点的距离, 从而缩小搜索范围, 提高搜索效率.A Star算法的数学公式为:F (n) =G (n) +H (n) , 其中F (n) 是从起始点经由节点n到目标点的估计函数, G (n) 表示从起点移动到方格n的实际移动代价, H (n) 表示从方格n移动到目标点的估算移动代价.
如图2所示, 将要搜寻的区域划分成了正方形的格子, 每个格子的状态分为可通过(walkable) 和不可通过 (unwalkable) .取每个可通过方块的代价值为1, 且可以沿对角移动 (估值不考虑对角移动) .其搜索路径流程如下:
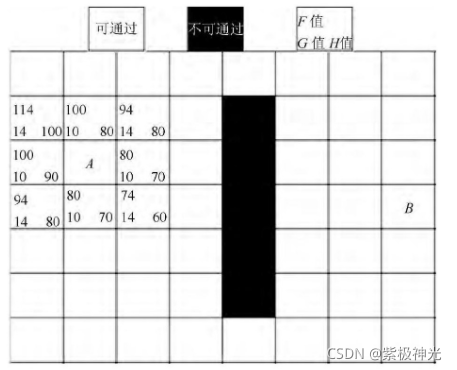
图2 A Star算法路径规划
Step1:定义名为open和closed的两个列表;open列表用于存放所有被考虑来寻找路径的方块, closed列表用于存放不会再考虑的方块;
Step2:A为起点, B为目标点, 从起点A开始, 并将起点A放入open列表中, closed列表初始化为空;
Step3:查看与A相邻的方格n (n称为A的子点, A称为n的父点) , 可通过的方格加入到open列表中, 计算它们的F, G和H值.将A从open移除加入到closed列表中;
Step4:判断open列表是否为空, 如果是, 表示搜索失败, 如果不是, 执行下一步骤;
Step5:将n从open列表移除加入到closed列表中, 判断n是否为目标顶点B, 如果是, 表示搜索成功, 算法运行结束;
Step6:如果不是, 则扩展搜索n的子顶点:
a.如果子顶点是不可通过或在close列表中, 忽略它.
b.子顶点如果不在open列表中, 则加入open列表, 并且把当前方格设置为它的父亲, 记录该方格的F, G和H值.
Step7:跳转到步骤Step4;
Step8:循环结束, 保存路径.从终点开始, 每个方格沿着父节点移动直至起点, 即是最优路径.A Star算法流程图如图3所示.
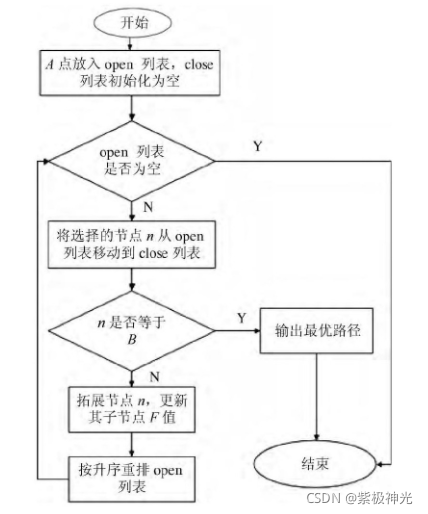
图3 A Star算法流程
⛄二、部分源代码
%Main
clc
clear
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%Grid and path parameters
%Grid size [y,x,z] and resolution
sizeE=[80 80 20];
d_grid=1;
%Starting point
x0=5;
y0=7;
z0=12;
%Arrival point
xend=68;
yend=66;
zend=6;
%Number of points with low elevation around start and end point area
n_low=3;
%A* or Theta* cost weights
kg=1;
kh=1.25;
ke=sqrt((xend-x0)2+(yend-y0)2+(zend-z0)^2);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%Map definition
%Average flight altitude
h=max(z0,zend);
%Points coordinates in [y,x,z] format
P0=[y0 x0 z0];
Pend=[yend xend zend];
%Generate map
[E,E_safe,E3d,E3d_safe]=grid_3D_safe_zone(sizeE,d_grid,h,P0,Pend,n_low);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%Path generation
%Store gains in vector
K=[kg kh ke];
%Measure path computation time
tic
%Generate path (chose one)
% [path,n_points]=a_star_3D(K,E3d_safe,x0,y0,z0,xend,yend,zend,sizeE);
% [path,n_points]=theta_star_3D(K,E3d_safe,x0,y0,z0,xend,yend,zend,sizeE);
[path,n_points]=lazy_theta_star_3D(K,E3d_safe,x0,y0,z0,xend,yend,zend,sizeE);
T_path=toc;
%Path waypoints partial distance
%Initialize
path_distance=zeros(n_points,1);
for i=2:n_points
path_distance(i)=path_distance(i-1)+sqrt((path(i,2)-path(i-1,2))2+(path(i,1)-path(i-1,1))2+(path(i,3)-path(i-1,3))^2);
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%Plot
%Map grid
x_grid=1:d_grid:sizeE(2);
y_grid=1:d_grid:sizeE(1);
%Path on safe map
figure(1)
surf(x_grid(2:end-1),y_grid(2:end-1),E_safe(2:end-1,2:end-1))
hold on
plot3(x0,y0,z0,‘gs’)
plot3(xend,yend,zend,‘rd’)
plot3(path(:,2),path(:,1),path(:,3),‘yx’)
plot3(path(:,2),path(:,1),path(:,3),‘w’)
axis tight
axis equal
view(0,90);
colorbar
%Path on standard map
figure(2)
surf(x_grid(2:end-1),y_grid(2:end-1),E(2:end-1,2:end-1))
hold on
plot3(x0,y0,z0,‘gs’)
plot3(xend,yend,zend,‘rd’)
plot3(path(:,2),path(:,1),path(:,3),‘yx’)
plot3(path(:,2),path(:,1),path(:,3),‘w’)
axis tight
axis equal
view(0,90);
colorbar
%Path height profile
figure(3)
plot(path_distance,path(:,3))
grid on
xlabel(‘Path distance’)
ylabel(‘Path height’)
%A star algorithm
function [path,n_points]=a_star_3D(K,E3d_safe,x0_old,y0_old,z0_old,xend_old,yend_old,zend_old,sizeE)
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%Cost weights
kg=K(1);
kh=K(2);
ke=K(3);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%Algorithm
%If start and end points are not integer, they are rounded for the path genertion. Use of floor and ceil so they are different even if very close
x0=floor(x0_old);
y0=floor(y0_old);
z0=floor(z0_old);
xend=ceil(xend_old);
yend=ceil(yend_old);
zend=ceil(zend_old);
%Initialize
%Size of environment matrix
y_size=sizeE(1);
x_size=sizeE(2);
z_size=sizeE(3);
%Node from which the good neighbour is reached
came_fromx=zeros(sizeE);
came_fromy=zeros(sizeE);
came_fromz=zeros(sizeE);
came_fromx(y0,x0,z0)=x0;
came_fromy(y0,x0,z0)=y0;
came_fromz(y0,x0,z0)=z0;
%Nodes already evaluated
closed=[];
%Nodes to be evaluated
open=[y0,x0,z0];
%Cost of moving from start point to the node
G=Inf*ones(sizeE);
G(y0,x0,z0)=0;
%Initial total cost
F=Inf*ones(sizeE);
F(y0,x0,z0)=sqrt((xend-x0)2+(yend-y0)2+(zend-z0)^2);
%Initialize
exit_path=0;
%While open is not empy
while isempty(open)0 && exit_path0
%Find node with minimum f in open
%Initialize
f_open=zeros(size(open,1),1);
%Evaluate f for the nodes in open
for i=1:size(open,1)
f_open(i,:)=F(open(i,1),open(i,2),open(i,3));
end
%Find the index location in open for the node with minimum f
[~,i_f_open_min]=min(f_open);
%Location of node with minimum f in open
ycurrent=open(i_f_open_min,1);
xcurrent=open(i_f_open_min,2);
zcurrent=open(i_f_open_min,3);
point_current=[ycurrent, xcurrent, zcurrent];
%Check if the arrival node is reached
if xcurrent==xend && ycurrent==yend && zcurrent==zend
%Arrival node reached, exit and generate path
exit_path=1;
else
%Add the node to closed
closed(size(closed,1)+1,:)=point_current;
%Remove the node from open
i_open_keep=horzcat(1:i_f_open_min-1,i_f_open_min+1:size(open,1));
open=open(i_open_keep,:);
%Check neighbour nodes
for i=-1:1
for j=-1:1
for k=-1:1
%If the neighbour node is within grid
if xcurrent+i>0 && ycurrent+j>0 && zcurrent+k>0 && xcurrent+i<=x_size && ycurrent+j<=y_size && zcurrent+k<=z_size
%If the neighbour node does not belong to open and to closed
check_open=max(sum([ycurrent+j==open(:,1) xcurrent+i==open(:,2) zcurrent+k==open(:,3)],2));
check_closed=max(sum([ycurrent+j==closed(:,1) xcurrent+i==closed(:,2) zcurrent+k==closed(:,3)],2));
if isempty(check_open)==1
check_open=0;
end
if isempty(check_closed)==1
check_closed=0;
end
if check_open<3 && check_closed<3
%Add the neighbour node to open
open(size(open,1)+1,:)=[ycurrent+j, xcurrent+i, zcurrent+k];
%Evaluate the distance from start to the current node + from the current node to the neighbour node
g_try=G(ycurrent,xcurrent,zcurrent)+sqrt(i^2+j^2+k^2);
%If this distance is smaller than the neighbour distance
if g_try<G(ycurrent+j,xcurrent+i,zcurrent+k)
%We are on the good path, save information
%Record from which node the good neighbour is reached
came_fromy(ycurrent+j,xcurrent+i,zcurrent+k)=ycurrent;
came_fromx(ycurrent+j,xcurrent+i,zcurrent+k)=xcurrent;
came_fromz(ycurrent+j,xcurrent+i,zcurrent+k)=zcurrent;
⛄三、运行结果



⛄四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1]马云红,张恒,齐乐融,贺建良.基于改进A*算法的三维无人机路径规划[J].电光与控制. 2019,26(10)
3 备注
简介此部分摘自互联网,仅供参考,若侵权,联系删除
🍅 仿真咨询
1 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化
2 机器学习和深度学习方面
卷积神经网络(CNN)、LSTM、支持向量机(SVM)、最小二乘支持向量机(LSSVM)、极限学习机(ELM)、核极限学习机(KELM)、BP、RBF、宽度学习、DBN、RF、RBF、DELM、XGBOOST、TCN实现风电预测、光伏预测、电池寿命预测、辐射源识别、交通流预测、负荷预测、股价预测、PM2.5浓度预测、电池健康状态预测、水体光学参数反演、NLOS信号识别、地铁停车精准预测、变压器故障诊断
3 图像处理方面
图像识别、图像分割、图像检测、图像隐藏、图像配准、图像拼接、图像融合、图像增强、图像压缩感知
4 路径规划方面
旅行商问题(TSP)、车辆路径问题(VRP、MVRP、CVRP、VRPTW等)、无人机三维路径规划、无人机协同、无人机编队、机器人路径规划、栅格地图路径规划、多式联运运输问题、车辆协同无人机路径规划、天线线性阵列分布优化、车间布局优化
5 无人机应用方面
无人机路径规划、无人机控制、无人机编队、无人机协同、无人机任务分配
6 无线传感器定位及布局方面
传感器部署优化、通信协议优化、路由优化、目标定位优化、Dv-Hop定位优化、Leach协议优化、WSN覆盖优化、组播优化、RSSI定位优化
7 信号处理方面
信号识别、信号加密、信号去噪、信号增强、雷达信号处理、信号水印嵌入提取、肌电信号、脑电信号、信号配时优化
8 电力系统方面
微电网优化、无功优化、配电网重构、储能配置
9 元胞自动机方面
交通流 人群疏散 病毒扩散 晶体生长
10 雷达方面
卡尔曼滤波跟踪、航迹关联、航迹融合















 149
149











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











