







电机
直流电机就是有电就转,根据电压大小不同,转速不同。
通过PWM调节电机的转速,一般电机都会有驱动板,来驱动电机。


把电机接好驱动板,就可以通过单片机的pwm来控制电机的速度了,还可以根据其他接口的高低电平控制电机的正反转和刹车。
编码器
直接看我写的编码器的使用,本质上来说也是一个传感器。单片机就是在处理传感器传回来的脉冲信息,从而得知转速。
电机编码器的使用
舵机
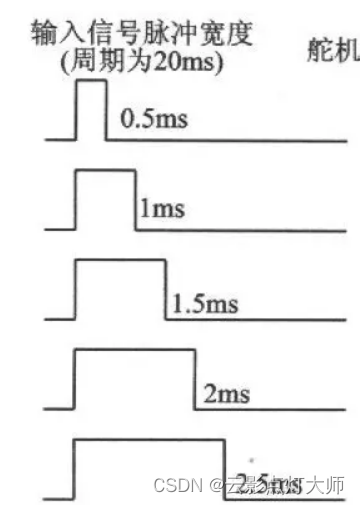
舵机是通过调节pwm的占空比来转不同的角度
输出的占空比也有一定的要求:就是在周期20ms内,高电平的时间是0.5ms 到 2.5ms 对应着舵机的转角(0到180°或者0到270°或者其他厂家设计的角度),所以舵机也只要输出一个pwm波就行了
PID算法
pid算法是用的比较广泛的算法,目的就是让系统快速准确的到达目标值。通过调节Kp,Ki,Kd的值,来改变系统的状态。
位置式

增量式

/**************************************************************
函数功能:增量PI控制器
入口参数:编码器测量值,目标速度
返回 值:电机PWM
根据增量式离散PID公式
pwm+=Kp[e(k)-e(k-1)]+Ki*e(k)+Kd[e(k)-2e(k-1)+e(k-2)]
e(k)代表本次偏差
e(k-1)代表上一次的偏差 以此类推
pwm代表增量输出
在我们的速度控制闭环系统里面,只使用PI控制
pwm+=Kp[e(k)-e(k-1)]+Ki*e(k)
//增量式的pi控制应该如上所示
****************************************************************/
int Incremental_PI (int Encoder,int Target)
{
static float Bias,Pwm,Last_bias,Integral_bias;
Bias=Target-Encoder;//计算偏差
Integral_bias+=Bias;
Integral_bias=Xianfu(Integral_bias,5000);
Pwm=Velocity_KP*Bias+
Velocity_KI*Integral_bias+
Velocity_KD*(Bias-Last_bias); //增量式PI控制器
Last_bias=Bias;
if(Pwm>7000)Pwm=7000;
if(Pwm<-7000)Pwm=-7000;
return Pwm;
}
多传感器
IIC读取
SPI读取
AD转换读取
电平读取
















 5542
5542











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











