







电动势,是导体内电子运动的必要条件,也是电子运动趋势的一种表现,因而具有一定的方向性。
电动势的方向,规定为从电源的负极,经过电源内部指向电源的正极,即与电源两端电压的方向相反。
反电动势,是指由反抗电流发生改变的趋势而产生电动势。
反电动势一般出现在电磁线圈中,如继电器线圈、电磁阀、接触器线圈、电动机、电感等。

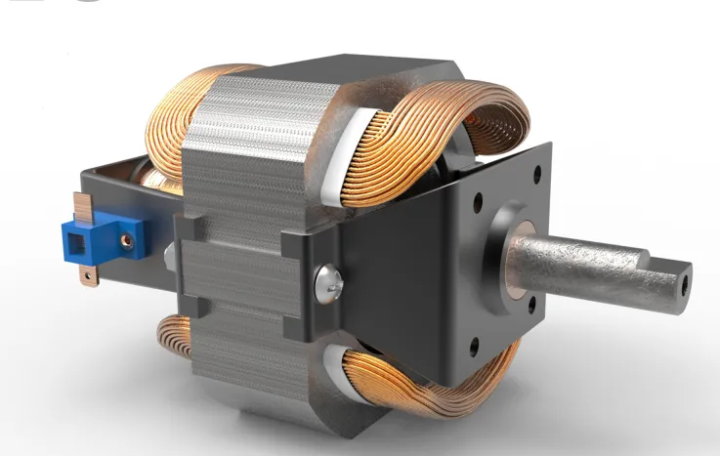
对于电动机产品,定子部分是电能的输入端,而转子部分则是电机做功的输出端;通过定子部分输入的电能,一部分用于转子部分做功,另一部分则会消耗于线路内阻,以及其他损耗。
转子部分产生的反电动势,即电动机做功的要素。反电动势消耗了电路中的电能,但它并不是一种“损耗”,与反电动势对应的那部分电能,将转化为用电设备的能量输入。
影响电机反电动势的因素,包括定子绕组的匝数、转子磁体产生的磁场、转子角速度和定子与转子之间的气隙。
变压器的输出电压、绕线式转子电机的转子开路电压,是比较直观的可以测量的感应电动势,也是反电动势;
对于永磁同步电机,通过某种方式将转子拖动后,在定子绕组的接线端测量电机的反电动势。
电机的反电动势,是制约电机电流的要素, 如果电动机运行时,由于负载过大、机械性故障等因素而停转,这时就没有反电动势,相当于电阻很小的绕组线圈,直接被接在电源两端,额定电压下的电流会很大,电动机绕组将会因为电流过大而烧毁。
由此我们就可以较好地理解,电机堵转试验、电机起动瞬间,因为转子处于静止状态下,没有反电动势的抵抗,是导致电流特别大的根本原因。

同样的,对于电机的输入电压较低的情况,电机转子无法转动,也无反电动势产生,电动机也就很容易被烧坏。
步进电机的一些特点:
1.一般步进电机的精度为步进角的 3-5%,且不累积。
2.步进电机外表允许的最高温度。 步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃至于失步,因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏 130度以上,有的甚至高达摄氏 200度以上,所以步进电机外表温度在摄氏 80-90度完全正常。
3.步进电机的力矩会随转速的升高而下降。 当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率越高,反向电动势越大。在它的作用下,电机随频率(或速度)的增大而相电流减小,从而导致力矩下降。
4.步进电机低速时可以正常运转,但若高于一定速度就无法启动,并伴有啸叫声。步进电机有一个技术参数:空载启动频率,即步进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发生丢步或堵转。在有负载的情况下,启动频率应更低。如果要使电机达到高速转动,脉冲频率应该有加速过程,即启动频率较低,然后按一定加速度升到所希望的高频(电机转速从低速升到高速) 。
步进电动机以其显著的特点,在数字化制造时代发挥着重大的用途。伴随着不同的数字化技术的发展以及步进电机本身技术的提高,步进电机将会在更多的领域得到应用。
步进电机广泛应用于医疗机械、3D打印机等精密仪器上,是目前非常常见的电机,而讲到电机驱动,不得不提到的就是TMC电机驱动芯片了,德国TRINAMIC推出的步进电机驱动芯片在步进电机行业中,一直是顶尖的存在。拥有多项专利技术,使步进电机运行更静音,更平稳,还有堵转检测及节能专利技术。

















 1247
1247

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









