






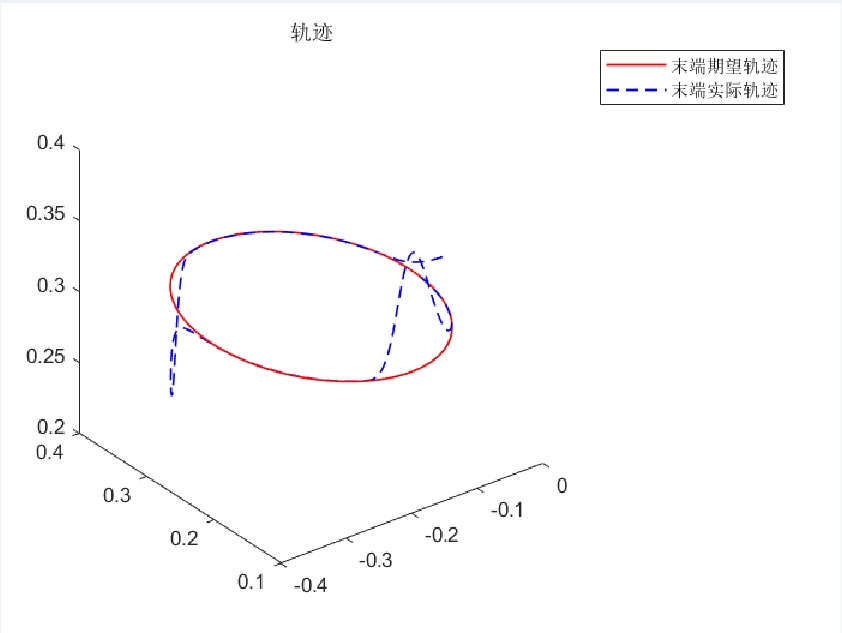
基于模型的六轴机器人阻抗力控制算法(matlab simscape,机器人模型可换),视频中红色为期望轨迹,黑色为实际轨迹,工程可一键运行,可学到机器人阻抗力控制算法以及通过m文件设置simulink参数及调用simulink的方法。
ID:44349677866561118
我叫广东小林
标题:基于模型的六轴机器人阻抗力控制算法及其在MATLAB SimScape中的应用
摘要:
近年来,机器人技术在工业自动化领域得到了广泛应用。机器人阻抗力控制算法是实现机器人和人类安全协作的重要技术手段之一。本文基于模型的六轴机器人阻抗力控制算法,利用MATLAB中的SimScape工具实现了一个可一键运行的工程。通过该工程,我们可以学习到机器人阻抗力控制算法的原理,并了解如何通过M文件设置Simulink参数和调用Simulink的方法。
-
引言
机器人阻抗力控制算法是指通过对机器人的力和位置进行联合控制,使其能够灵活地对外界力进行响应。这种控制方法在实现机器人和人类安全协作、处理不确定环境中的力互动等方面具有重要意义。 -
模型化的六轴机器人阻抗力控制算法
在本文中,我们采用了基于模型的六轴机器人阻抗力控制算法。该算法通过建立机器人动力学模型,并根据期望轨迹和实际轨迹之间的误差,计算出适应力控制所需的力矩。通过对机器人力矩进行控制,使其能够实现期望的阻抗力。 -
MATLAB SimScape工程实现
为了验证六轴机器人阻抗力控制算法的可行性,我们选择使用MATLAB SimScape工具进行建模和仿真。SimScape是一种基于物理系统建模和仿真的软件工具,通过它我们可以快速地搭建机器人的模型,并进行力控制算法的验证。 -
工程运行与调试
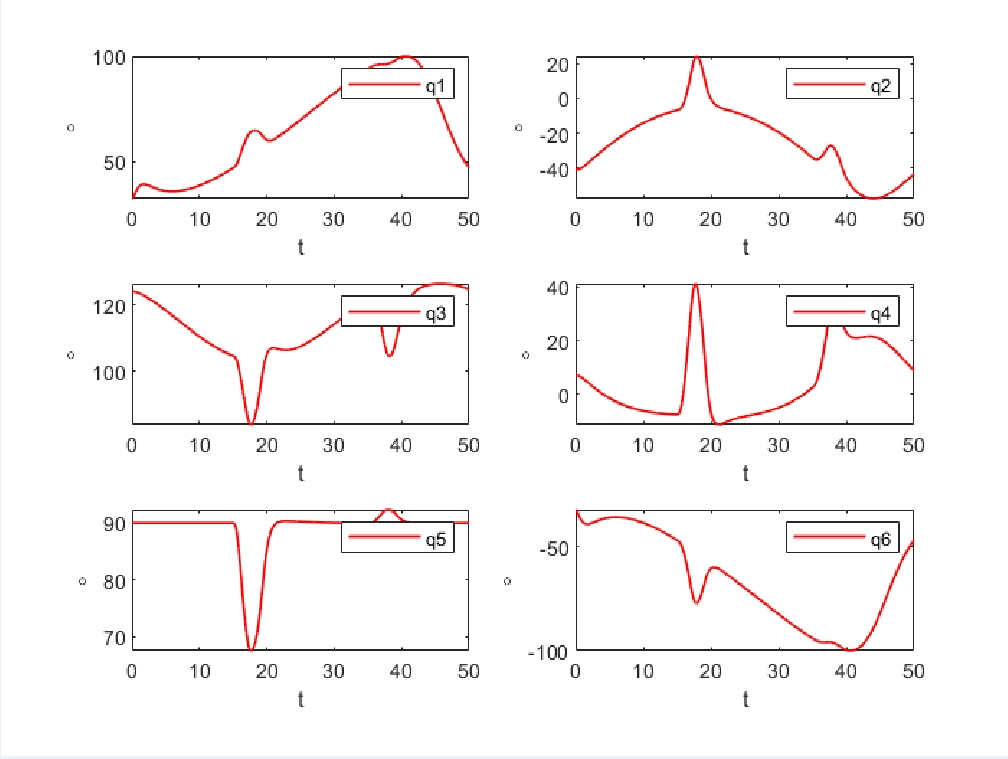
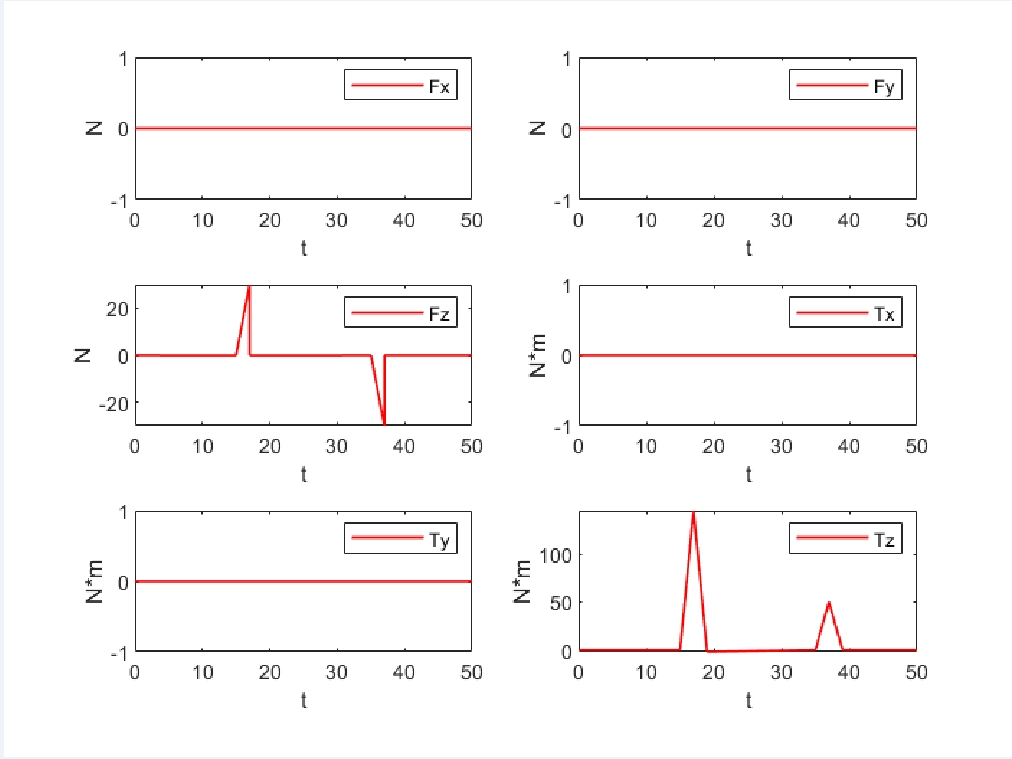
我们通过一个一键运行的工程,演示了六轴机器人阻抗力控制算法的应用。通过调用M文件设置Simulink参数,并调用Simulink模型实现了对机器人的力控制。在工程运行过程中,我们可以观察到期望轨迹和实际轨迹之间的差异,进一步验证了六轴机器人阻抗力控制算法的有效性。 -
结果与讨论
通过对工程运行过程的观察和分析,我们可以看到六轴机器人在不同外界力作用下的阻抗特性。同时,我们还对机器人阻抗力控制算法进行了参数调优,并观察了不同参数对机器人运动特性的影响。 -
总结与展望
本文基于模型的六轴机器人阻抗力控制算法在MATLAB SimScape中的应用,通过一键运行的工程演示了该算法的有效性。未来可以进一步研究机器人阻抗力控制算法在不同场景下的应用,并考虑与其他控制算法的结合,以提高机器人的协作能力。
通过以上的论述,我们希望读者能够了解到基于模型的六轴机器人阻抗力控制算法的原理和应用,以及在MATLAB SimScape中的实现方法。同时,通过工程演示,读者可以深入理解该算法在实际工程中的应用价值。
以上相关代码,程序地址:http://coupd.cn/677866561118.html















 1078
1078











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









