






简介:ISO15765简介
ISO 15765的中文含义为道路车辆 - 基于CAN网络的诊断通信(DoCAN),整套协议由以下部分组成:
- ISO 15765-1第1部分:一般信息和用例定义(这里都是一些概念)
-ISO 15765-2 第2部分:传输协议和网络层服务
- ISO 15765-3第3部分:统一诊断服务的实施(CAN上的UDS )
- ISO 15765-4第4部分:与排放有关的系统的要求(排放系统是指与发动机相关,尾气排放相关的规范,因为世界各国环保政策,导致其与一般ECU需要执行的标准不一样)
出现背景
概念1:要系统的了解ISO15765,要结合IEC7498 七层模型,才能更好的了解该协议的内容,做到融会贯通。
| 诊断应用层(ISO14229)该协议不是专门针对CAN总线设置的。 |
| 应用层 IS015765-3 |
| 表示层(诊断不涉及该层) |
| 会话层(诊断不涉及该层)(部分文档将会话层描述为IS015765-3描述) |
| 传输层(诊断不涉及该层) |
| 网络层(ISO15765-2) |
| 数据链路层(ISO11898) |
| 物理层(ISO11898) |
多说一句,我们传统的CAN总线或LIN总线,大多数实际项目其实只包括(应用层)+数据链路层+物理层。
而诊断,因为数据更加复杂,在架构时,增加了一个传输层。比如19读DTC时,其数据长度可能达到几十个字节(一个DTC占用3个Byte)。就必然要将数据分段传输。ISO 15765-2就是规定了如何传输和将信息分片。
ISO-14229-1是uds统一诊断的规范。
ISO-11898-1/2是数据链路层规范。
不容易理解点,总结一下ISO14229-1和IS015765-3的区别和联系,ISO14229-1,仅定义了数据的格式,如说明了哪些服务,DID等。
1:PDU(protocol Data Unit)简称协议数据单元。
一般情况下,会根据分层不同,加上不同的前缀,网络层PDU=N_PDU
数据链路层=L_PDU
应用层=A_PDU
比如22 F1 94 读软件版本号 。
应用层数据单元只包含:
1:(22)=(服务名称)+(DID数据)
2:网络层:会添加寻址信息Address(就是地址),寻址方式(功能寻址+物理寻址),将信息分片:
3:数据链路层:会将添加数据长度信息(DLC),添加校验,添加仲裁方式(如:CSMA/CD(载波监听多路访问/冲突检测)原理),添加CRC校验,添加sof ,和帧结尾等信息。都是数据链路层,添加的信息。
数据链路层;基本实现方法,都是封装在底层代码中,一般情况下,我们只需要对协议栈进行配置即可,实现功能的定制化。
但是据我自己的项目经验:目前不是所有的芯片,都支持,网络层的协议栈配置,有些低端芯片还需要程序员去写,网络层的代码。于是对于工程师来说详细了解下ISO15765还是很有必要的。
2:服务器客户端通讯方式
概念2:client/service(客户端与服务器通信模型的概念)。ISO11898中定义地通讯方式是平等(peer)方式。没有客户端和服务器的概念。
而诊断中,有一个概念就是请求(request id)和应答(respond id),设置诊断工程都会设置两个参数。概念上与客户端+服务器的概念是一致的。
3:通讯中的各种服务(service)
所有的网络层服务都具有相同的通用结构。为了定义这种服务,需要定义三种类型的服务原语:
3.1. 请求服务(Request):
用于向网络层传递控制报文信息及要发送的数据,应用于更高层或应用层。即应用层需要调用此服务像传输层提供报文控制信息(比如数据长度这个就属于控制信息有了这个信息,传输层才知道该如何分片,如何将数据分为几片)。
3.2. 指示服务(Indication):
用于向更高层或应用层传递状态信息及接收到的数据,应用于网络层。indication实际存在在传输层。向上传递状态信息,如传递流控制帧接收到的状态信息,和数据
具体说来,Indication前端应该执行的是底层传入数据的处理函数,即读取PDU信息,这一帧具体是SF、FC、CF还是FF。若满足条件,继续向上,即应用层传递。是不是可以理解为
有如下情况。传输层,接收到数据链路层传上来的三个连续帧,数据全部接收。然后再将数据整合好传递到应用层。
如果第一帧数据后,中间插入一个流控制帧,告诉我们先等待。那我们先等待,直到数据被全部接收
3.3 确认服务(Confirm):
被网络层使用,用于向更高层或应用层传递状态信息。传输层向应用层传递信息。
具体说来,Confirm和Indication很像的是都是从网络层向应用层传递信息,有何区别呢?
在代码的处理中,Confirm的前端应向底层外发Tx数据或超时处理函数,反馈的信息不需要包含数据。而Indication传递的信息则分为两种,一种包含真实数据,另一种不包含。也就是说confirm是内部使用,indication1是外部使用。
举一个不太恰当的例子。你们公司在做一个很大的项目。需要一些人专门负责协调事务。confirm相当于内部的产品经理。负责协调领导和具体项目组之间的联系。
而indication就相当于对外的项目经理。主要负责协调客户与内部之间的协调和联系。
对于功能寻址(Functional addressing),只能被单帧所支持
不管发送或接收是成功或是出错,都需要上报给应用层
4 网络层时间控制分析
网络层定时参数的作用和意义:
我们知道CAN是一种对,及时性要求很高的通讯标准。同样的对于基于can通讯标准的UDS诊断协议,也是一种对实时性有一套强制性的时间标准。
不能一帧信息发送时间过长,不能请求报文帧发送出去,间隔五六秒服务器才给回复。
4.1网络层定时参数详解
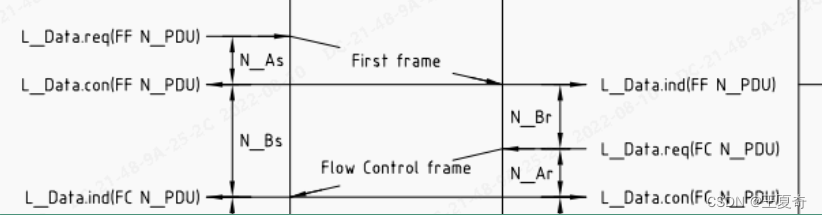
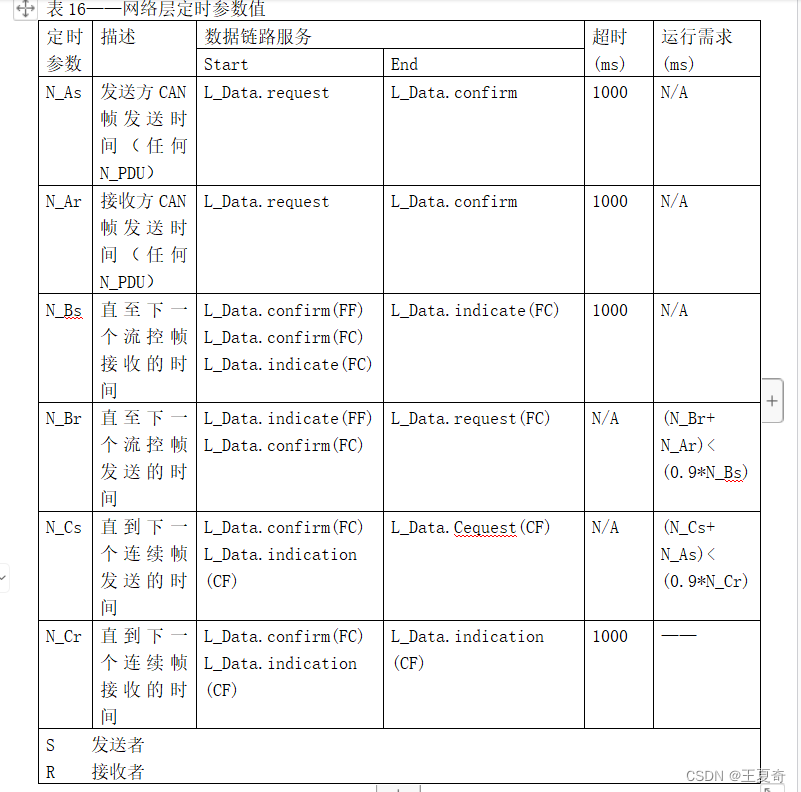
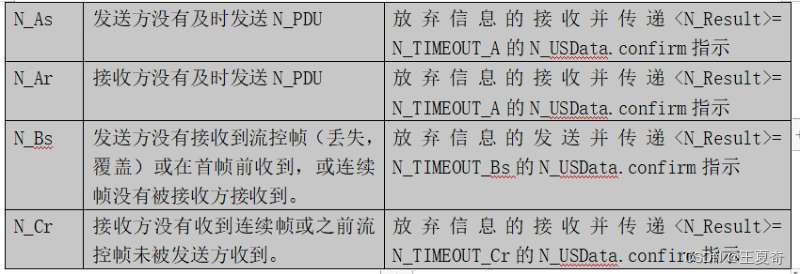
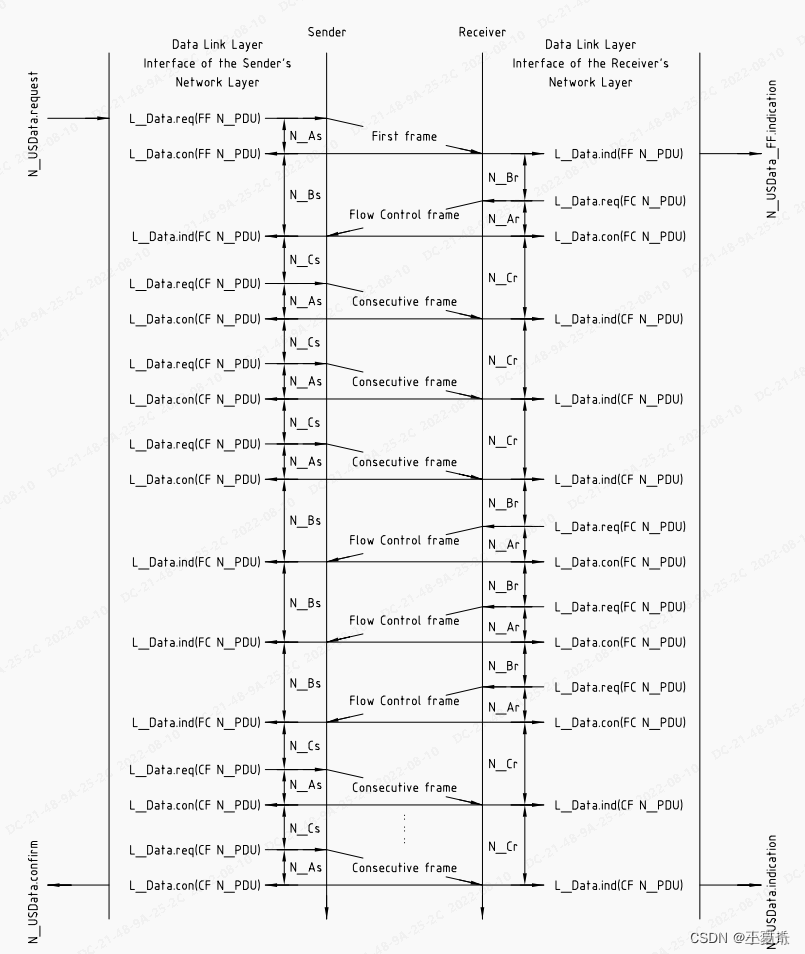
网络层定时参数定义了N_As、N_Ar、N_Bs、N_Br、N_Cs、N_Cr六个参数
N_As:发送方CAN帧发送时间:从数据链路层,开始调用L_Data.confirm(就是网络层开始请求数据链路层数据开始计时),到L_Data_confirm(数据链路层确认帧发送完成);ISO5765-2中规定,最大时间为1000ms。
N_Ar:本质上和N_As的性质是一样的,只是一个是关注发送端,一个是检查接收端。且两个时间参数的最大值=1000ms。在实际代码中可以这两个被调用的服务是一致的。只不过一个是在客户端中调用,一个是在服务器程序中进行调用。
N_Bs:发送端发送首帧后到接受到流控帧的时间。也就是L_Data_confirm,到L_Data_indication之间的时间,参数最大值=1000ms。
N_Br:接收端收到首帧后到发送流控帧的时间,也就是接受首帧后。调用L_Data_indication函数时开始计时,到L_Data_request的请求时,参数最大值=(N_Br+N_Ar)<(0.9*N_Bs)
(N_Br+N_Ar)<(0.9*N_Bs):公式解释,直接将公式变换一下,N_Br<0.9*N_Bs-N_Ar
接收端收到首帧后到发送流控帧的时间<0.9发送端发送首帧后到接受到流控帧的时间-接受端帧的发送时间。
看图更容易理解:
N_Cr 有两种计时方式,
1:)接收端从发送完流控制帧结束时(通过L_Data.con(FC),开始计数,到L_Data.ind(CF N_PUD)也就是到连续帧被接收端接收时。
2:)从一个连续帧被接收时,开始计时,到下一个流控制帧被接收。
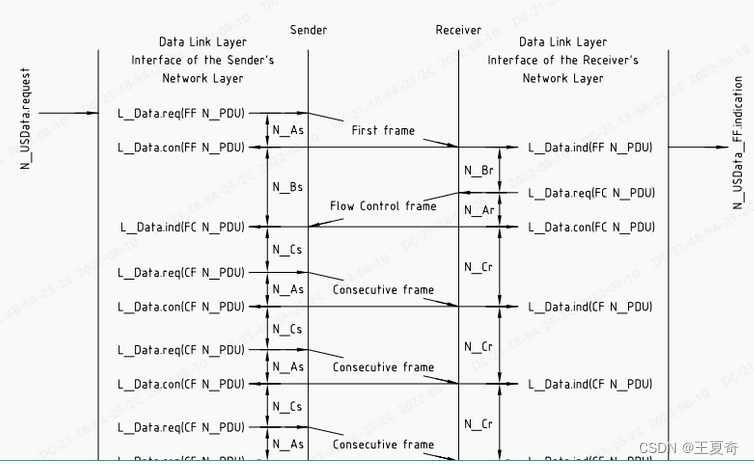
从接收端,发送流控制帧(调用L_Data.con开始算起,到收到发送端的数据(开始调用L_Data.ind)开始算起)的时间。
1:N_Cs的执行方式,也有两种,从流控帧被接收开始计时(L_Data.ind),到发送方,发送续帧请求开始(L_Data.req(CF N_PDU))。
2:从发送方发送续帧,开始确认L_Data.con(CF N_PUD)到下一帧连续帧L_Data.req(CF N_PUD)的请求时间。
注意1:发送端Sender和Receiver的理解,这是很容易误解的点。记住发送FF的实体,就是Sender,发送流控的就是Receiver。
注意2:关于Sender中的ind服务con服务计时点,与Receive中的ind服务con服务同步的问题。从理论上来说,他们之间是都没有时间误差的。这取决于帧的报文结构,大家还记得ACK位吗?
当发送端发送首诊时,检测到ACK是显性时本地的数据链路层触发con服务。同时Receive会触发ind服务,向上层的网络层提供数据。
同理Receive端发送的流控阵的con服务,也是和Sender的ind服务是同时触发的。
实际诊断过程中,诊断仪或模拟诊断上位机,和实际被诊断样件中,Sender和Receive的关系可以相互转换。
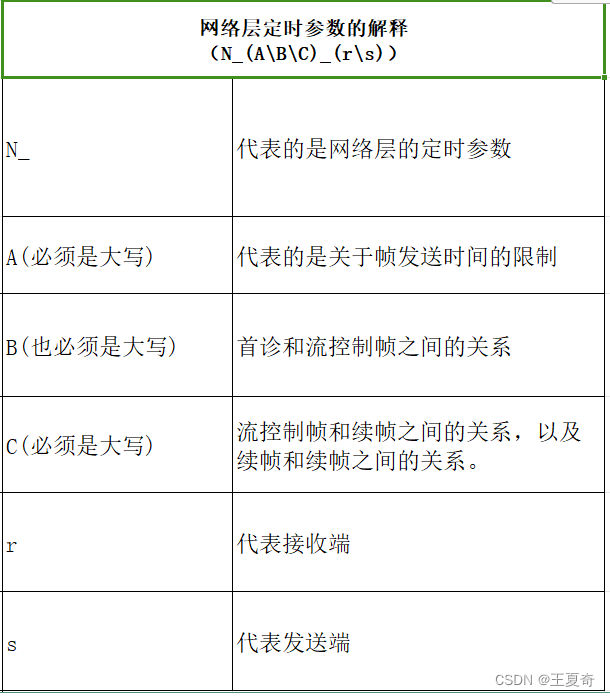
4.2 网络层定时参数解释
4.3网络层时间参数,最大值(即超时阈值)
需要说明的是N_AS或N_Ar虽然最大值默认为1000ms,但是基本实际中不会被采用,这个参数也没有啥默认价值,原因在于
N_BS最大值是1000,N_Br实际上可以理解为收到首诊,处理的过程,处理完成后,接收端将会将流控制帧发出,N_Ar也是最大值1000。即实际应用中,N_Ar肯定<900ms.
4.4:超时处理流程
4.5 对于网络层定时参数一些容易出现误解地方的详细解释
对于网络层中定时参数,定义了一个sender(发送端)和一个Receive(接收端),一定不要和client(客户端)和server(服务端)区别开来。这是两个不同的概念。
以下两个例子,就可说明
实际测试过程中,我们将上位机(或诊断仪)定义为client(客户端)。将ECU设置为server(服务器),这种设定在整个测试过程中是不会变化的。
但是,sender和Receive却不是固定的,也就是说,sender可以是客户端,也可以是服务器。同理
Receive也是如此。
比如 使用0x2E服务,由客户端(诊断仪)写入一段20个Byte的数据到ECU(服务端),这种情况下。客户端就是sender,所有参数就要按照(N_AS,N_BS,N_CS来设定)。同理服务器端就是
Recever端,所有参数都要按照(N_Ar,N_Br,N_Cr来设定)。
如果,使用0x22 服务,读取一段内存(19个字节数据),此时客户端客户端(诊断仪)先发送一条诊断请求报文(单帧),ECU服务器发送应答(先发送首帧),然后客户端(诊断仪)发送一个流控制帧。此时客户端(诊断仪)就成为Receiver。ECU客户端就成为Sender了。
故:总结一条可以准确的定义Sender和Receiver。就是多帧的发送方,是Sender。流控帧的发送方,是Receiver。
5:应用层定时参数
是适用于非默认会话模式的运行,
| 应用层定时参数的定义 说明:应用层的定时参数,是需要根据不同的会话参数区分的(如默认会话,扩展会话,编程会话等。。。) | |||||
| 默认会话应用层定时参数 | |||||
| 参数定义 | 描述 | 补充说明 | 最小值 | 最大值 | |
| P2can_Client | 成功发送请求消息(通过N_USData.con),到接收答复信息开始(多帧信息的N_USDataFirstFrame.ind和单帧信息N_USDataFirst) | 从发送信息完成,到首帧信息收取 完成的时间。 | P2can_Server_max(也就是50ms)+△P2can(△P2can分为客户端部分与服务器部分,与网关数量有关,是否需要标定) (参数值意义,暂不明确) | N/A | N/Aa |
| P2*can_Client | 接收到否定码为0x78的否定响应码(N_USData.con) 到接收到答复信息开始(多帧信息的N_USDataFirstFrame.ind和单帧信息N_USDataFirst) | 从接收78NRC到回复信息的首帧 被成功接收 | P2*can_Server_max+(也就是最大允许5s的一个延时) +△P2can_rsp | N/A | N/Ab |
| P2can_Server | 在接收到请求消息(通过N_USData.ind指示) 服务器开始答复(通过N_USData.req指示)信息的运行要求 | 运行要求 | 0 | 50 | 50ms |
| P2*can_Server | 在传递了NRC78后(通过N_USData.con指示) 服务器开始答复信息的运行要求 | 运行要求 | 0 | 5000 | 5000ms |
| P2can_Client_phy | 客户端成功发送,不需要应答的物理地址,请求信息(N_USData.con),到客户端能发送下一个物理地址请求信息等待的最小时间 | 定时器重载值 | P2can_Server_max (也就是50ms) | N/A | |
| P2can_Client_fun | 客户端成功发送功能地址请求信息(通过N_USData.con指示) 到他能发送下一个功能地址请求信息的最小等待时间 | 定时器重载值 | P2can_Server_max (也就是50ms) | N/A | |
| 1:补充说明,服务器是可以发送连续的NRC 0x78的,0x78之间的最小时间间隔为1/2P2*can_Client,最大误差为±20%的P2*can_Server(也就是5s+△P2can_rsp) 2: 客户端,发送下一个请求的最大请求时间,规范没有强制定义,但是必须满足非默认会话的S3server定时在服务器上一直运行。也就是需要一直维持在此会话模式中 | |||||
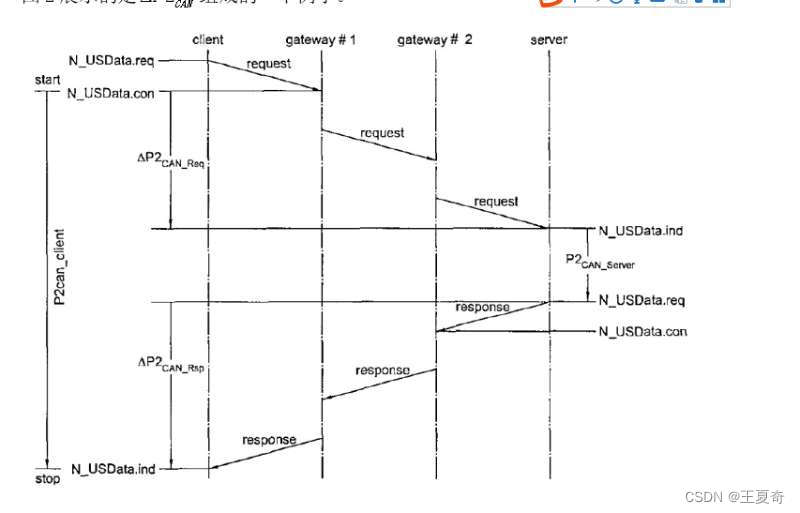
| 3:P2can参数,被认为是所有系统网络设计参考延时,该延时受(通过网关+总线带宽+加上安全系数) 3.1 包含网关的数量(网关数量越多,则消耗的时间则越长,网关数量越少,则消耗的时间就越短) 3.2 CAN帧的发送时间(波特率)波特率越大 3.3 CAN总线的使用情况 3.4 CAN设备驱动使用方法,(轮询方式们还是中断方式),及网络层的处理时间 | △P2can又分为两部分: 1)一个是客户机发送请求到服务器的时间 2)二是服务器发送应答至客户机的时间 | ||||
下图展示了△P2can的组成成分
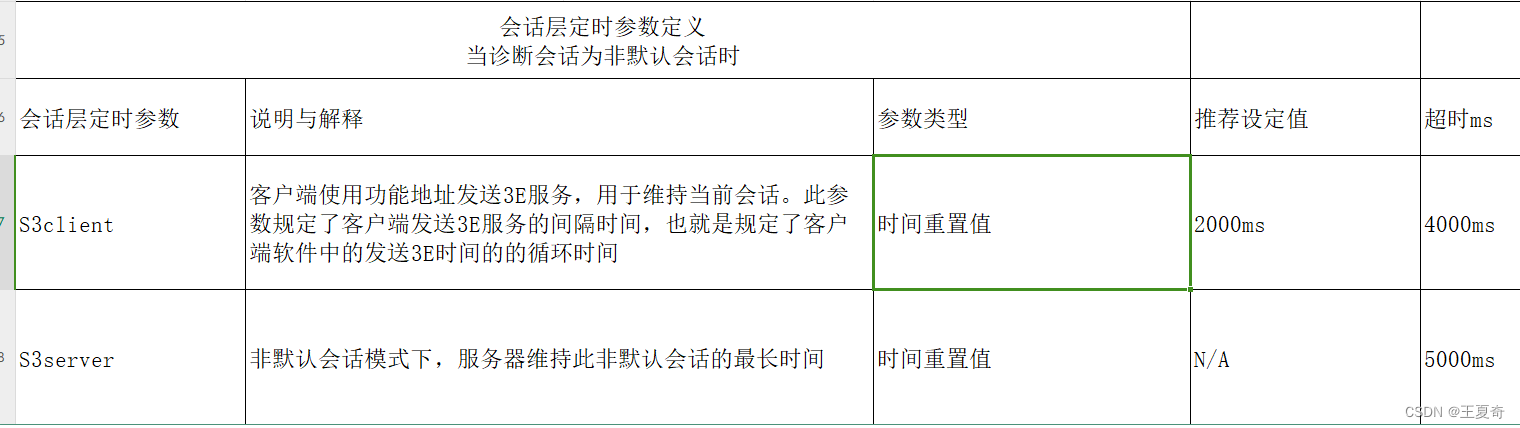
6会话层定时参数的定义
6.1当诊断会话处于非默认会话模式时,即需要按照下表















 1222
1222











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









