







本文已经首发在个人微信公众号:工业机器人仿真与编程(微信号:IndRobSim),欢迎关注!
概述
涂胶也是生产制造过程中经常使用的一种工艺应用,几乎在所有具有密封特性的产品中都会使用到,比如电子产品的防水胶、汽车玻璃的密封胶等等,还有一些需要粘贴接合的产品也会使用到涂胶应用。
随着工业机器人技术的发展,涂胶加工也逐渐的被机器人取代,工业机器人涂胶具备涂胶路径准确、涂胶用量均匀、一致性高等优点,并且二十四小时不间断,能够大大提高生产效率,降低生产成本。
在DELMIA软件虚拟仿真中,机器人涂胶仿真也是一种重要的应用仿真。机器人涂胶具有两种形式,一种是移动胶枪工具涂胶,另一种就是固定胶枪工具涂胶。其中,固定胶枪工具涂胶的应用最为广泛。
本期,就来为大家介绍一下,DELMIA软件机器人固定胶枪工具涂胶应用的虚拟仿真方法。
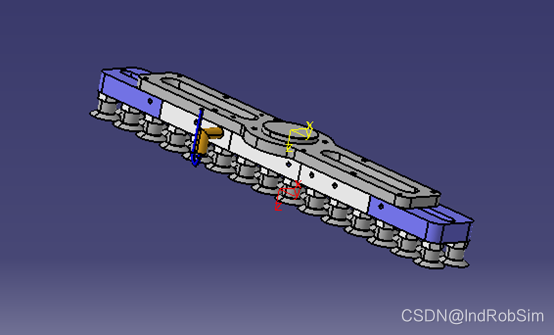
吸盘工具定义
吸盘工具与机械抓手工具类似,都是机器人用于实现工件搬运的工具。不同的是吸盘工具属于真空类产品,通常用于搬运质量较轻、质地脆弱的非金属类工件,如玻璃、塑料等;而机械抓手工具是气动、液压或电动类产品,通常用于搬运质量较重、质地较坚硬的金属类工件。
一般的吸盘工具都没有运动机构,因此在使用DELMIA软件进行仿真应用时,只需要在吸盘工具上定义两个坐标系即可,其中一个是“Base”类型的坐标系,另一个是“Tool”类型的坐标系。这个过程可以在“Device Building”模块中完成。
Base坐标系的坐标原点位于吸盘工具安装法兰的几何中心位置,Tool坐标系的坐标原点位于吸盘的平面的几何中心位置,两个坐标系的坐标轴方向与机器人默认TCP坐标系坐标轴方向保持一致。
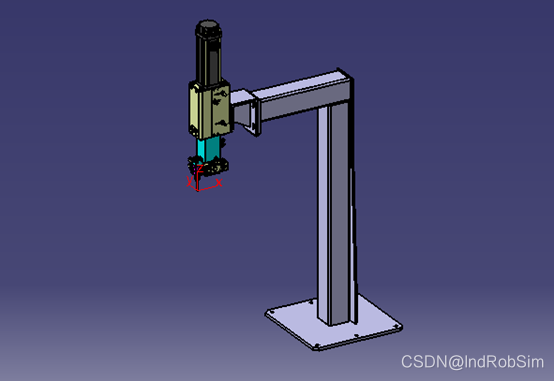
固定胶工具定义
机器人涂胶工艺应用中,一般使用的都是固定涂胶枪,也就是工业机器人搬运着工件到固定胶枪位置完成涂胶工作,涂胶完成后,机器人再将已涂胶的工件安装到待粘合的工件上。使用固定涂胶枪,机器人不仅能够完成涂胶任务,还能完成搬运、装配任务,从而避免了机器人只做单一应用,能够提高机器人利用率。
使用DELMIA软件进行机器人涂胶仿真时,涂胶枪要先定义成机器人工具,这样才能被机器人识别,机器人TCP才能标定到工具端。
固定胶枪工具的定义比较简单,它也不存在运动机构,只需要在胶枪模型上添加一个“Tool”类型的工具坐标系即可,这个过程也是在“Device Building”模块中完成。
工具坐标系的原点位于固定胶枪喷嘴几何中心处,坐标系Z轴指向胶枪喷嘴,X轴指向机器人进给方向。
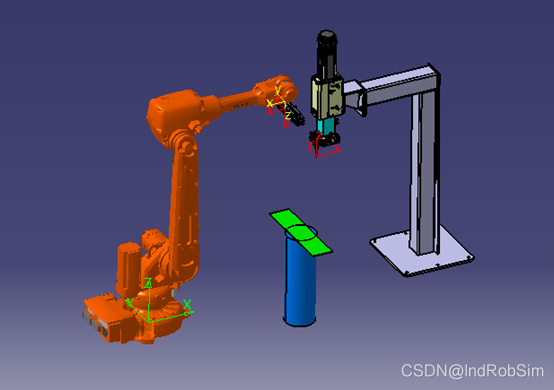
涂胶工作站搭建
进入DELMIA软件的“Device Task Definition”模块,按照涂胶机器人工作站的布局要求,导入机器人及外围设备模型,并对模型进行布局。导入的吸盘工具与固定胶枪工具都安装到机器人上,其中固定胶枪工具安装时选择“Fixed TCP”。
导入加工工件,然后将工件放置到简易工装上。
涂胶仿真操作要点
DELIMA软件机器人固定工具涂胶仿真与机器人固定点焊仿真非常相似,都是搬运工艺与另一种工艺应用的结合,因此,固定点焊仿真对涂胶仿真操作有一定的借鉴意义,详细操作过程可以参考之前发布过的文章《DELMIA软件:机器人固定点焊仿真》。
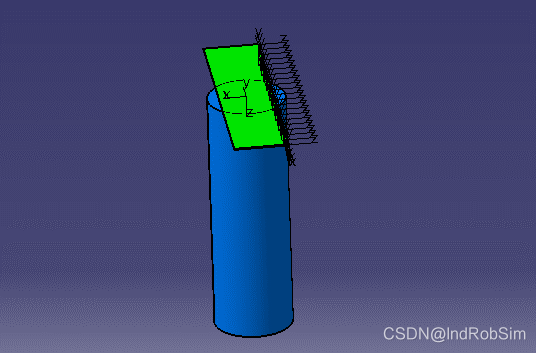
在对机器人进行示教编程以前,首先要为机器人搬运应用添加工艺参考坐标系,用以确定机器人抓取与放置工件的示教点位置。
使用“New Tag Group”命令在简易工装资源节点下创建工艺坐标组,然后再使用“New Tag”命令在创建的工艺坐标组下添加机器人搬运应用工艺参考点坐标。坐标原点位于简易工装上表面的几何中心处,坐标轴指向与吸盘工具的工具坐标系(TCP)的坐标轴方向保持一致。
同样的方法,在工件资源节点下为机器人创建涂胶工艺参考点坐标,参考坐标原点位于涂胶运行轨迹线上,坐标轴指向与固定胶枪的工具坐标系(TCP)坐标轴指向保持一致,这样可以避免在切换工具后机器人运行时姿态发生过大的变化。原则上,涂胶工艺参考点坐标添加的越多越好,这样能够使机器人运行轨迹与要求的涂胶轨迹保持无限接近。但是,由于工作时间以及机器人性能限制,对涂胶工艺参考点坐标的个数可以酌情设定,一般情况下在有转角或高低起伏的位置处一定要单独添加工艺参考点,均匀的平面在保证涂胶轨迹加工精度的基础上点数越少越好。
由于机器人使用了两个不同的TCP,因此在示教编程过程中要根据需要随时切换机器人TCP。搬运过程中使用吸盘TCP,涂胶过程中使用固定胶枪的TCP。
程序示教完成后,在搬运工艺参考点程序上为机器人添加抓取工件(Pick)与放置工件(Drop)指令。
仿真运行
程序调试优化完成后,使用“Process Simulation”命令以真实的运行状态对涂胶机器人工作站仿真运行,运行效果如下动态图所示,可以看到机器人按照编写的程序对工件进行抓取,然后在固定胶枪工具处实现涂胶,最后再把工件放置到简易工装上。
The End


















 2793
2793

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











