







目录
任务介绍
在DELMIA软件中制作旋转台设备运动机构,并实现机器人与旋转台设备联合运动虚拟仿真。仿真过程中,旋转台设备自动夹紧工件,待旋转到位后机器人进行焊接,焊接完成后旋转台设备返回,并释放工件。
旋转台设备运动机构分析
从运动机构的角度看,旋转台设备就是一个旋转机构与夹紧机构的结合体。其中,旋转机构由旋转台底座与旋转台组成,它们之间为旋转运动副;夹紧机构一般由中心对称放置的两台夹具组成,夹具可以包含直线运动副或旋转运动副,也可以是二者的结合。
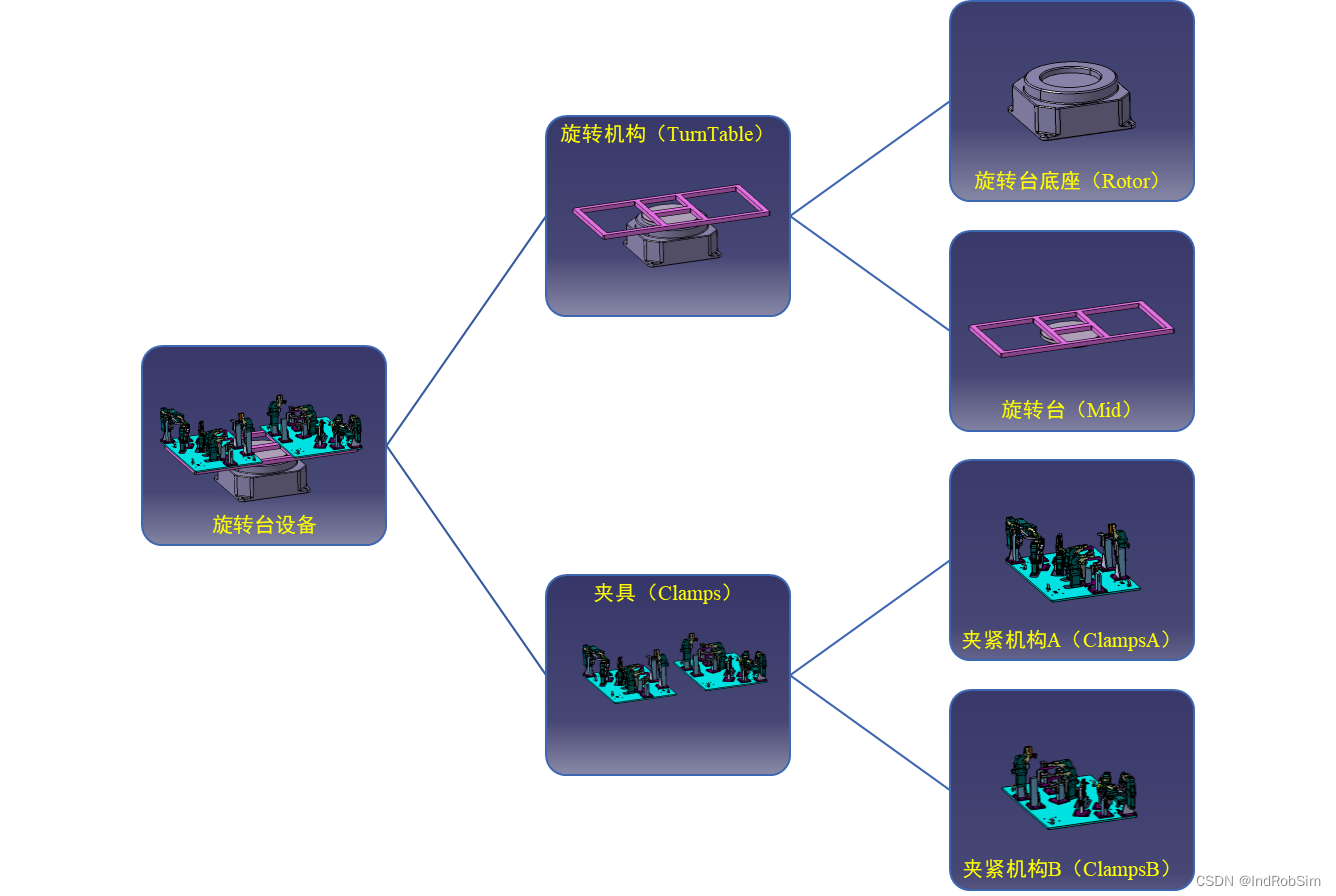
本例中使用的旋转台设备也是这样的一个结合体,在制作运动机构时需要先将设备模型按照上图所示拆分为旋转台底座、旋转台、夹紧机构底座、压臂。然后再将拆分后的旋转台底座与旋转台装配在一起,形成旋转机构装配体,并为其添加旋转运动副;将夹紧机构底座与压臂装配在一起,形成夹紧机构装配体,再分别制作出它的运动机构。
旋转台设备模型导入与装配
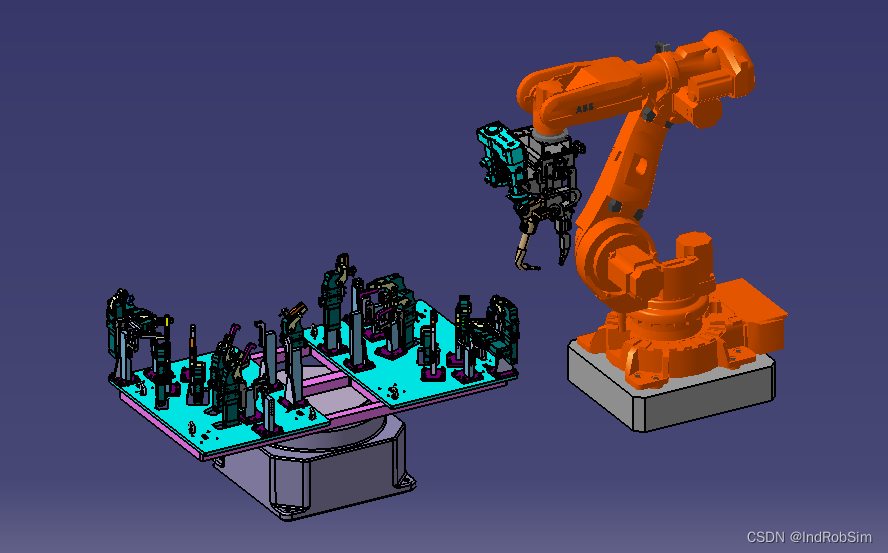
在DELMIA软件的“Device Task Definition”模块中,分别导入旋转台设备的旋转机构模型和夹紧机构模型。一般情况下,设备的各个机构导入后都能实现自动组装,仿真人员只需将设备摆放到合适位置即可,如下图所示。
使用“附加”命令,分别在旋转机构的旋转台模型与两个夹紧机构模型之间建立父子级关系,此时处于拆分状态的夹紧机构与旋转机构就安装到了一起,这样旋转机构在旋转时就能够带着夹紧机构一同旋转了。

旋转台设备示教编程
DELMIA软件中,所有设备的仿真运行控制都需要示教编程,旋转台设备也不例外。
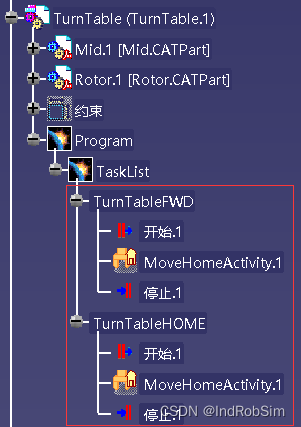
在Sequence工具条中,使用“New Task”命令在旋转机构下创建两条任务程序,并对其重命名,如旋转机构旋转程序(TurnTableFWD)、旋转机构返回程序(TurnTableHOME)。
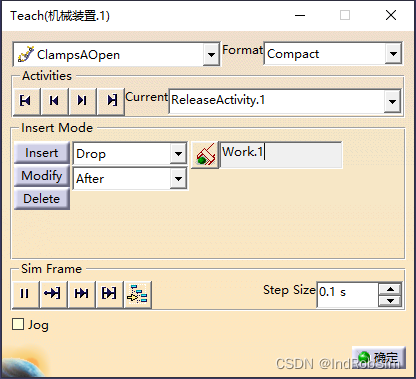
然后在Robot Management工具条中点击“Teach a device”命令按钮,选择旋转机构旋转程序,弹出旋转机构示教编程对话框。
在Insert Mode下选择“MoveHome”指令,为旋转机构示教“FWD”运动状态程序,旋转时间持续5s。

参考上述方法,再为旋转机构示教返回HOME点运动状态程序,持续时间依然为5s,旋转机构程序示教完成后,其PPR浏览树下出现示教的程序文件,如下图所示。
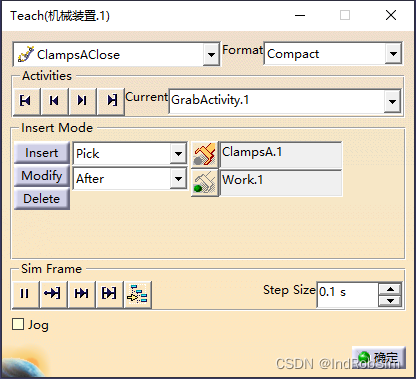
参考旋转机构的示教编程方法,为夹紧机构A示教编程。在夹紧机构A的关闭运动程序中,先利用“Delay”指令,示教延时程序,延时时间为0.5s。再利用“MoveHome”指令示教夹紧机构A关闭运动状态,运动持续时间为2s。利用“Pick”指令示教夹紧机构A抓取工件程序,其中Select Part used to pick后选择夹紧机构A,Select Part to Pick后选择工件。最后,再添加一条0.5s的延时指令。
在夹紧机构A的打开运动程序中,示教夹紧机构A的延时程序和打开动作程序,并利用“Drop”指令示教夹紧机构A释放工件程序,其中Select Part to Drop后选择工件。
夹紧机构A的程序全部示教完成后,在左侧的PPR浏览树中出现示教好的程序文件,如下图所示。

以上旋转台设备示教编程的详细操作步骤,可参考已发布过的文章《DELMIA软件:机器人工作站外围设备示教编程》。
设备工艺添加与工艺序列设计
将DELMIA软件切换到“Workcell Sequencing”模块,然后使用“Insert Activity”命令在左侧的PPR浏览树中添加工艺动作,添加完成后再将其修改为指定的工艺动作名称。
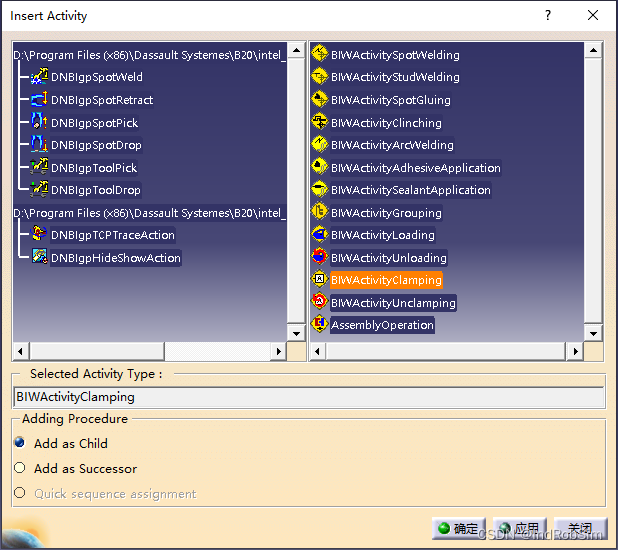
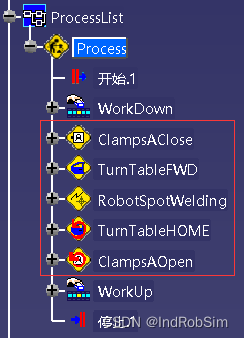
本例中需要添加5个工艺动作,分别为夹紧机构关闭(ClampsAClose)、夹紧机构打开(ClampsAOpen)、旋转机构旋转(TurnTableFWD)、旋转机构返回(TurnTableHOME)、机器人点焊焊接(RobotSpotWelding),如下图所示。
工艺动作添加完成后,使用“Assign a resource”命令为每一个工艺动作指派一个资源,如为夹紧机构关闭工艺动作指派夹紧机构A资源,为机器人点焊焊接工艺动作指派机器人资源等。
再使用“Set an Active Task”命令为每一个工艺动作设置资源的任务程序,如为夹紧机构关闭工艺动作设置夹紧机构A的夹紧程序,为机器人点焊焊接工艺动作设置机器人的点焊焊接程序等。
最后,使用“Open PERT Chart”命令打开波特图窗口。将添加的工艺动作按工艺流程进行排布,然后用“Link the selected activities”命令将其全部连接起来,如下图所示。

以上设备工艺添加与工艺序列设计的详细操作步骤,可参考已发布过的文章《DELMIA软件:机器人工作站中基于Process的设备任务调用》。
工艺动作中的WorkDown和WorkUp为工件的上料与下料动作,其创建方法可参考已发布过的文章《DELMIA软件物流仿真:使用输送带输送物料的仿真操作方法》。
仿真运行
在“Workcell Sequencing”模块中使用“Process Simulation”命令对机器人工作站仿真运行,运行效果如下方动态图所示,可以看到工件安装到旋转台上后,夹紧机构将其夹紧,旋转机构旋转到位后,机器人进行工件点焊焊接,然后旋转机构返回,夹紧机构打开,工件拆除。
The End

















 2512
2512











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











