




接上一篇:
一、示教编程
1. 点击左上角的“ABB” ![]() 菜单按钮,在弹出的菜单中点击“程序编辑器”
菜单按钮,在弹出的菜单中点击“程序编辑器”![]() ,弹出程序编辑器画面,如下图所示。
,弹出程序编辑器画面,如下图所示。

2.点击虚拟示教器操作面板上的“Enable” ![]() 按钮,为机器人上使能,示教器状态栏中机器人状态由“防护装置停止”切换为“电机开启”,如下图所示。
按钮,为机器人上使能,示教器状态栏中机器人状态由“防护装置停止”切换为“电机开启”,如下图所示。
![]()
3.使用虚拟示教器对机器人进行示教编程,轨迹如下图所示。

示教程序如下图所示。

二、仿真运行
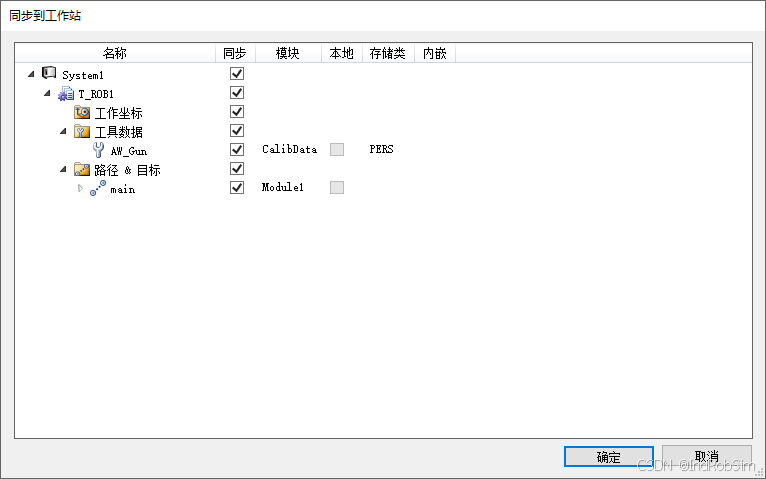
再次点击“同步”工具下的小三角,在弹出的下拉菜单中选择“同步到工作站”![]() ,在弹出的对话框中,勾选所有选项同步选项,点击确定按钮。(此时控制器数据同步到现场中)
,在弹出的对话框中,勾选所有选项同步选项,点击确定按钮。(此时控制器数据同步到现场中)
点击菜单栏中的“仿真”,点击“播放”![]() 工具,机器人开始按照示教轨迹自动运行,如下图所示。
工具,机器人开始按照示教轨迹自动运行,如下图所示。

三、总结
至此,Robotstudio软件创建机器人基础工作站已经完成,总结起来分为以下步骤:
1.创建机器人工作站布局
2.由布局配置机器人控制系统
3.同步现场数据至控制器
4.设定切换末端执行器
5.示教编程
6.仿真运行
实际当中并没有这么简单的工作站,创建基础工作站只是演示软件创建工作站的基本流程。另外,Robotstudio软件中内置的虚拟示教器与真实的工业机器人示教器没有任何区别,对于学习ABB机器人现场示教编程的,可以在基础工作站中进行学习使用。
仿真案例资源下载
解压后得到RobotStudio软件ABB机器人基础操作练习的虚拟仿真案例文件,文件夹内为使用RobotStudio创建的用于ABB机器人基础操作练习的虚拟仿真案例打包文件(Test1.rspag),打包文件使用RobotStudio 6.08.01版本软件创建,兼容RobotStudio 6.08版本,建议使用与创建打包文件相同版本的软件打开。
资源下载可能会发生付费,请酌情谨慎下载。
资源下载链接:https://download.csdn.net/download/WHX1083575213/90300557
更多内容,请关注公众号IndRobSim


















 9782
9782

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











