






第2部分包含了稳定性相关的基础概念以及其测量方法:环路增益。现在详细介绍环路增益,并介绍了四种推导环路增益的方法以及每种方法的优缺点。
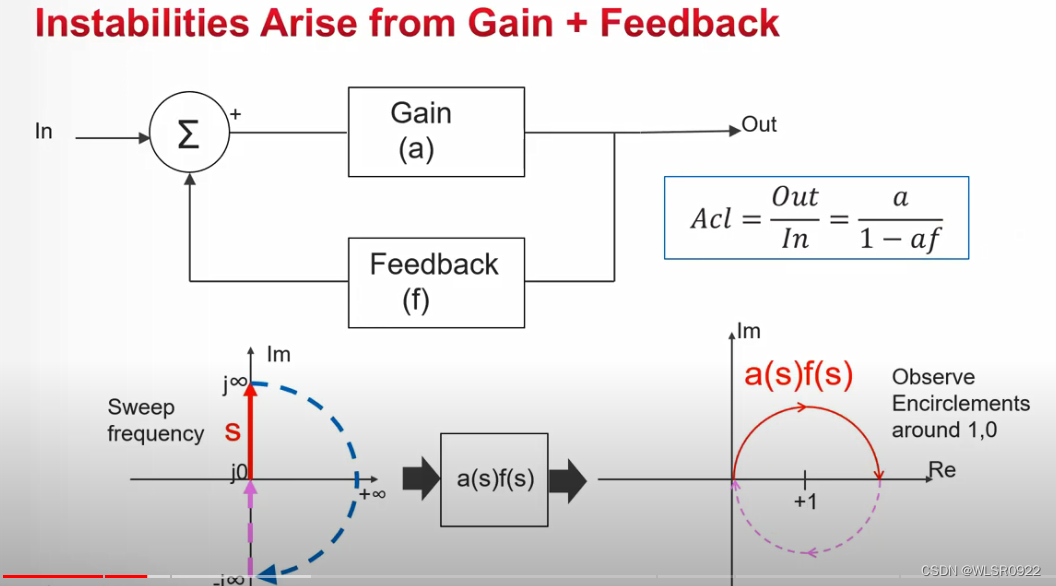
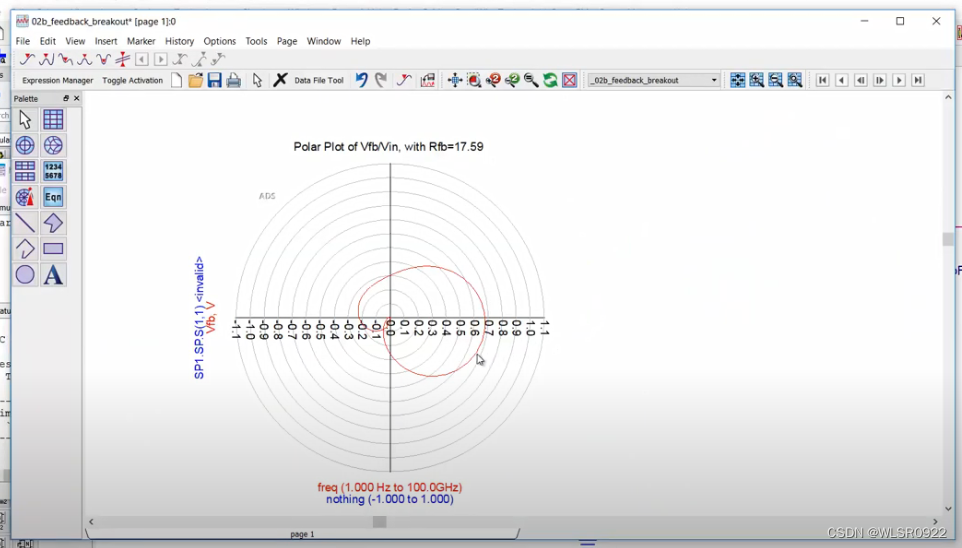
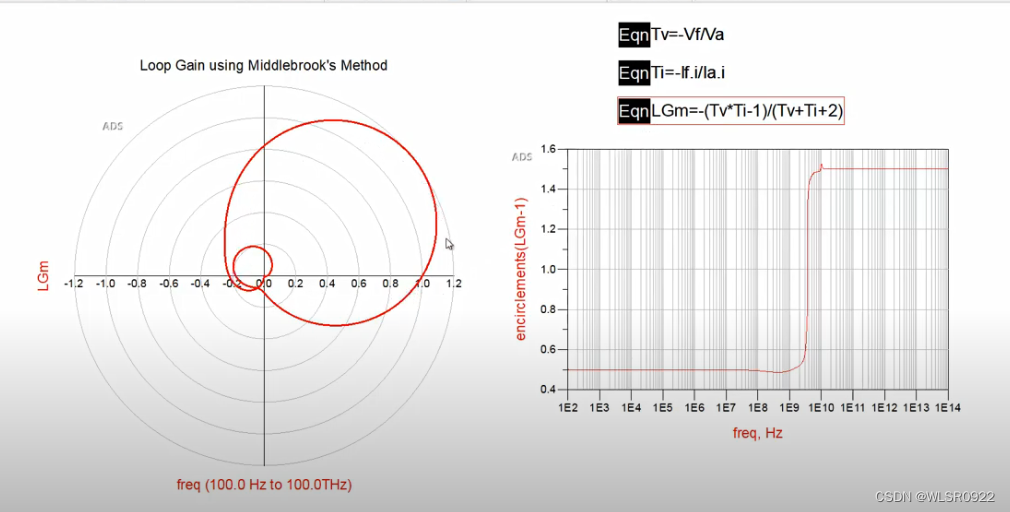
第2部分了解到放大器和反馈部分构成的反馈系统是否稳定的关键在于放大器与反馈的组合,也就是环路增益。如果这个环路增益在极坐标上顺时针绕(1,0)旋转,则系统将不稳定。如图一。
图一
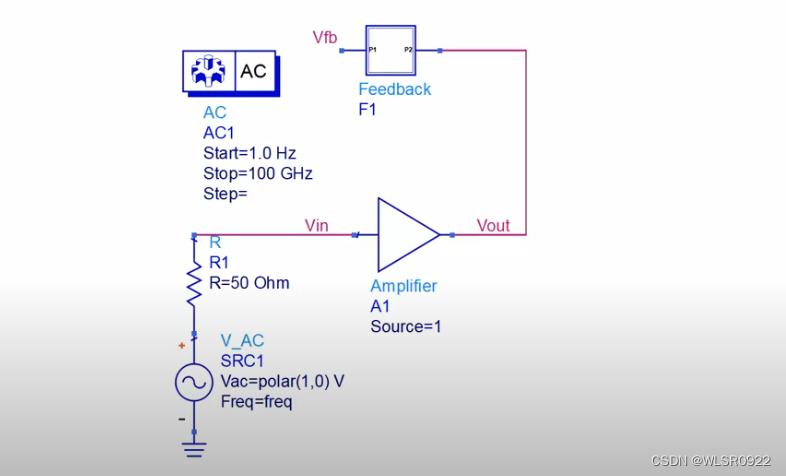
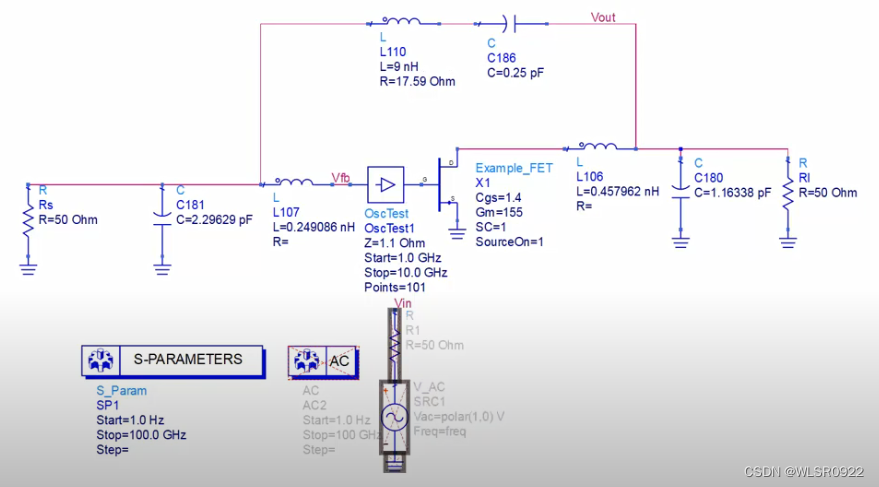
现在来继续探究第2部分提到的例子,并对其进行内部原理的解读。如图二、三、四。
图二
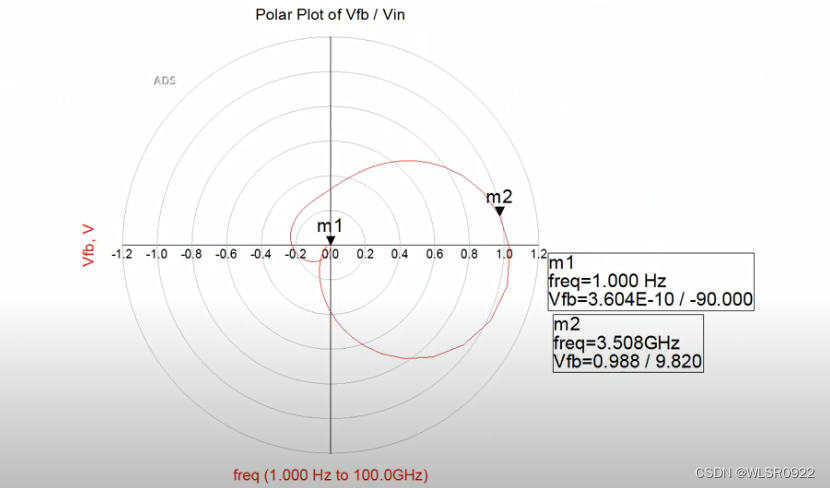
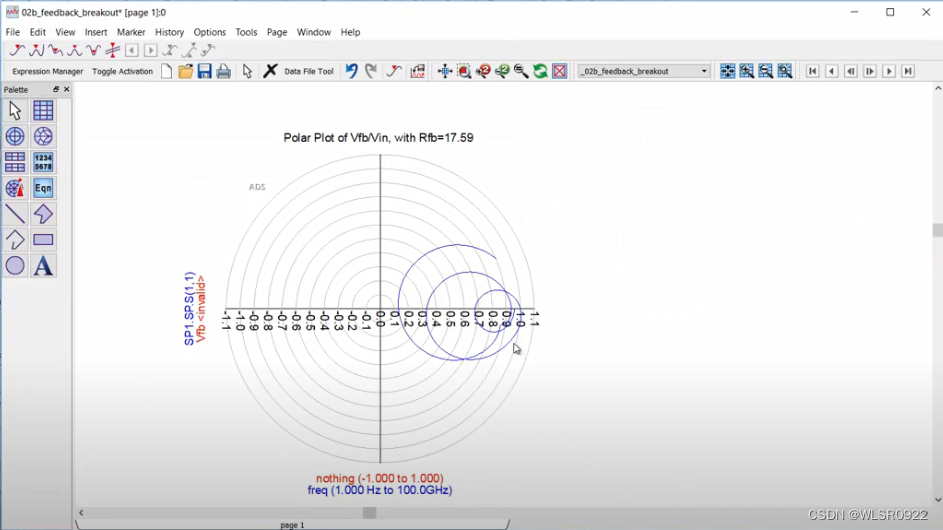
图三
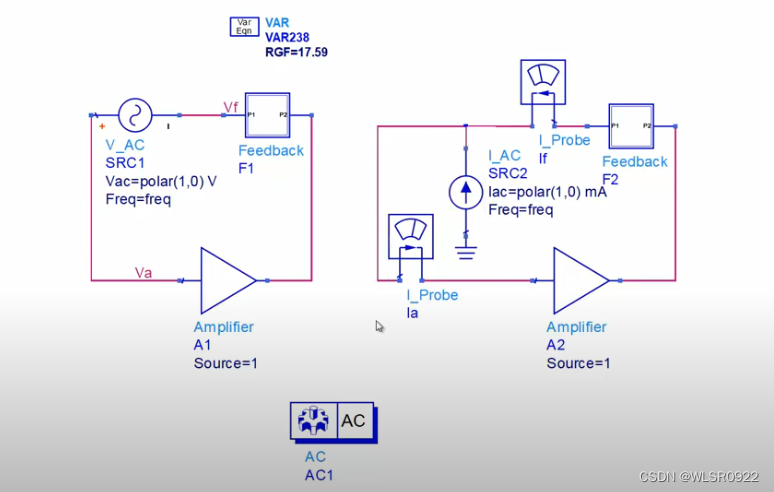
图四
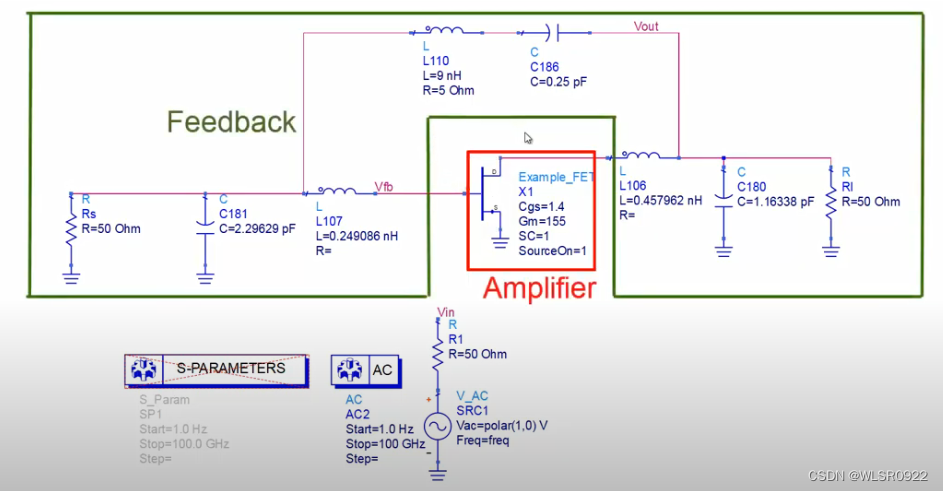
可以通过调整图四中的L110来使电路稳定或者振荡。晶体管就是图三中的Amplifier,红色框图为反馈模块。增加反馈电阻值为17.59Ohm,使得电路处于稳定的边缘。这是为了说明第2部分中为了计算环路增益,断开了反馈与输入,然后插入了交流信号源和AC仿真控件,然后绘制出图二的Vfb的返回电压。如图五,是改变反馈电阻后的结果。
图五
但是不确定上述这种方法是完全合理的,交流信号源注入50欧姆终端,在闭环瞬态振荡中理想电压源是一个短路状态,它会抑制瞬态分析中的阻尼振荡。上面的步骤可以用到ADS中的Osctestt-振荡器控件来完成。Osctest的优点是它将环路增益整合到单个s参数中-基本上元件内部有一个终端,正向波从这个终端发出,然后返回信号作为反向波返回到相同的终端。这意味着循环增益被压缩成只有一个s参数——S11,如图六。仿真就过如图七。
图六
图七
图七中,现在电路非常接近(1,0),但是实际上几乎不稳定,因为并没有完全包围(1,0)点。但是Osctest的电阻默认值是没有任何道理的。上面所有描述中还有几个漏洞,似乎都认为信号流向仅有反馈回路,实际上输入信号也会从反馈回路直接到晶体管输出端;输出端信号也会从晶体管直接到输入端。放大器和反馈块的划分是否正确?从阻抗入手来解释。
双空注入:一种测量技术,通过这一技术可以断开环路并注入两个信号(电压/电流,来抵消返回电压和电流)。以下图八展示的就是这个技术,仿真来获得返回电压和电流,见图九。
图八
图九
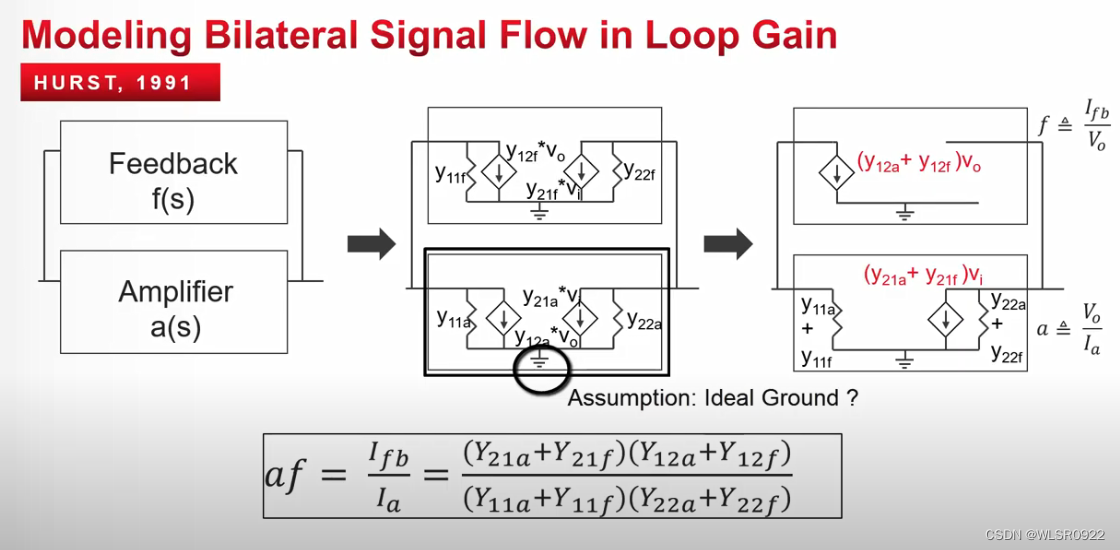
但是结果显示是不稳定的,这与之前使用Osctest的实验结果互相矛盾。Middlebrook该实验解决了阻抗问题,但是信号流向仍然是单一的。Hurst提出了解决该问题的方法:将放大器和反馈模块建模为并行的双向Y参数网络,这个方法考虑了两个方向的信号流,但是其也有相关假设,因此也不是完全可靠。如图十。
图十
我们参照Hurst的公式来对放大器和反馈单独建立仿真并转换为Y参数,如图十一、十二。
图十一
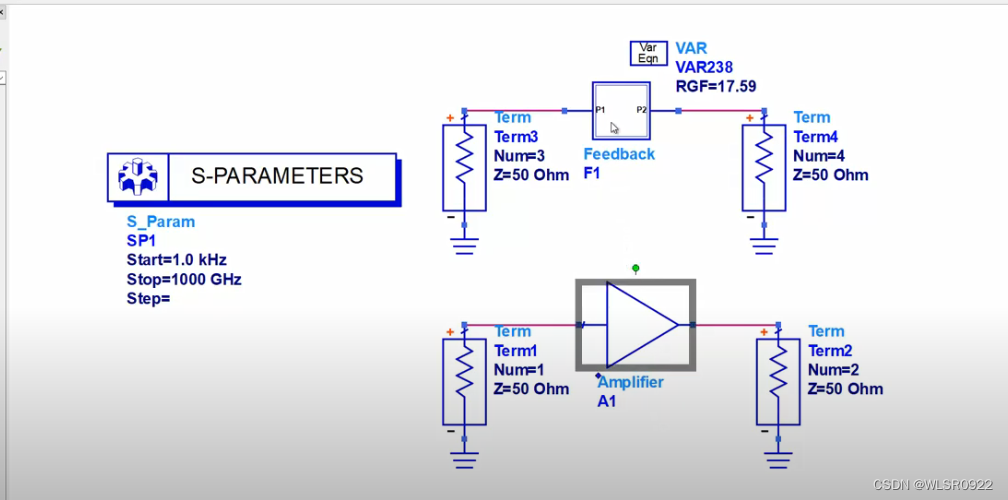
图十二
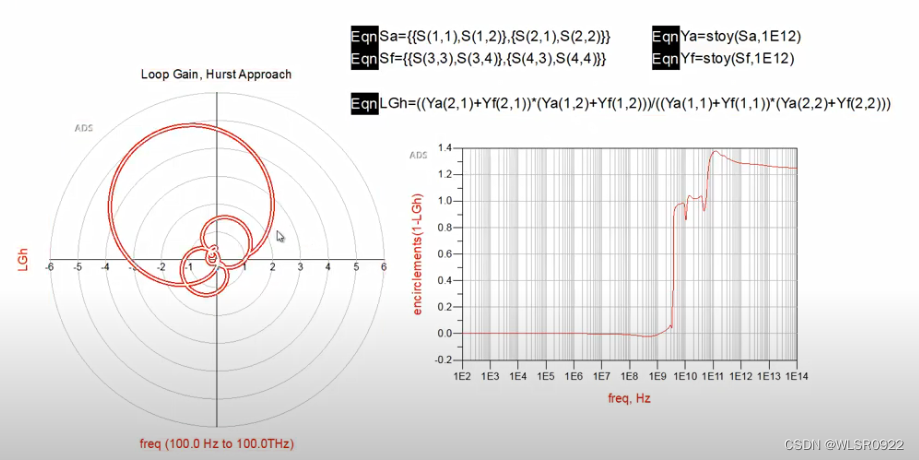
图十三
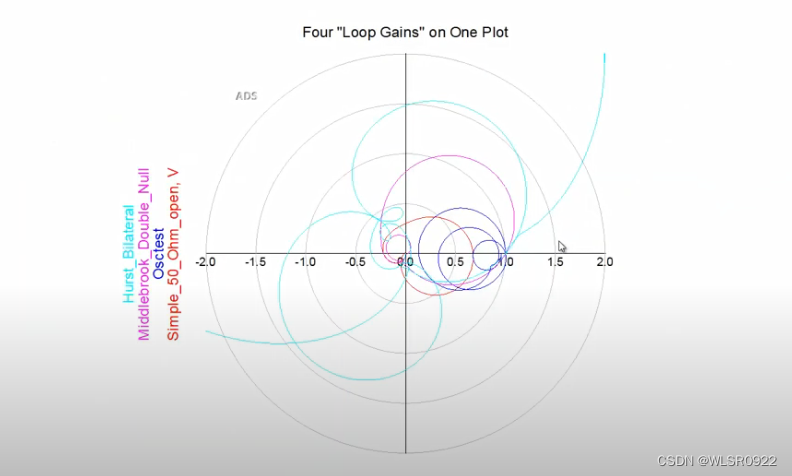
使用Hurst的公式得到另一个极坐标图,并且显示电路不稳定。如图十三。
上面介绍的四个方法,分别有两个显示电路稳定,另外两个显示电路不稳定。还记得在第1部分谈及的K因子的精度问题,当然环路增益技术也同样存在问题,因为每种技术都做出了假设以及对应的简化,在第4部分将会介绍可以放心使用的技术。















 369
369











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









