







一、非线性优化算法通用流程
非线性优化的基本流程可以总结如下(最小化问题):
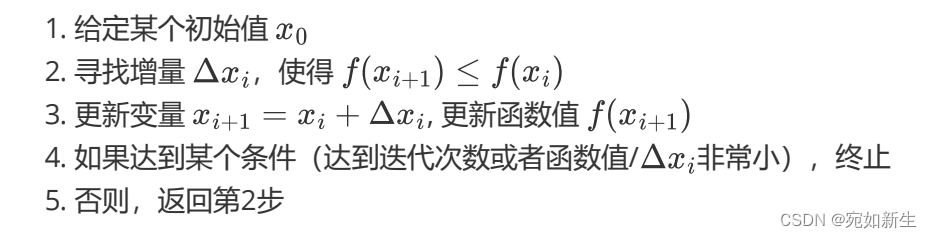
可以看到,我们主要的工作就是寻找那个
Δ
x
i
\Delta x_i
Δxi,而不同的寻找方法和更新流程,就对应不同的优化方法。
二、不同的优化方法
1.梯度下降法
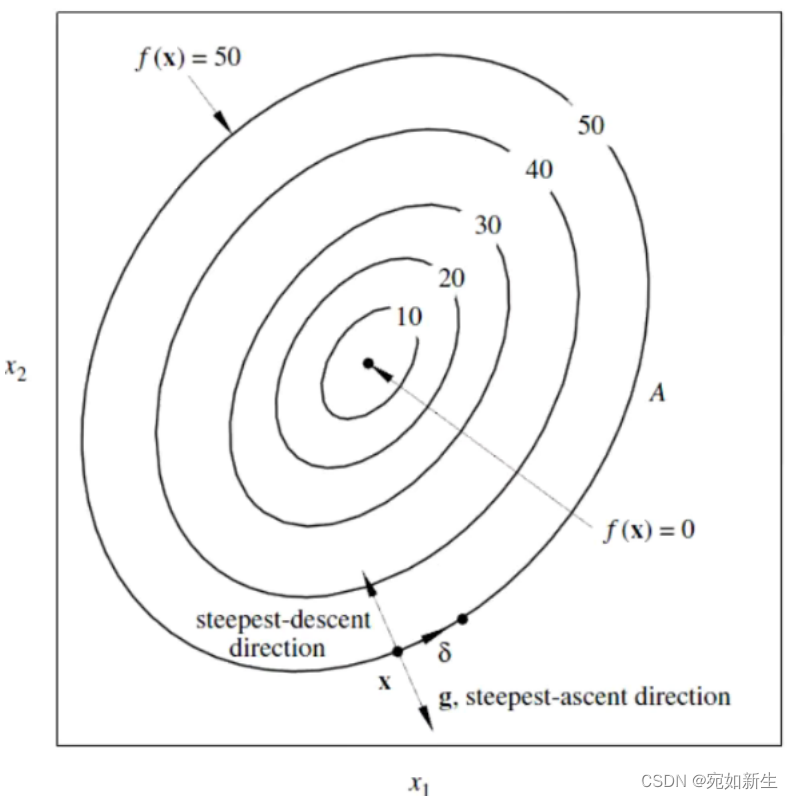
上图表示我们目标函数的二维表现形式。我们通过非线性优化的方法找到函数的最小值对应的
x
1
x_1
x1和
x
2
x_2
x2。
其中
g
(
x
)
g(x)
g(x)是
F
(
x
)
F(x)
F(x)的一阶导。
α
\alpha
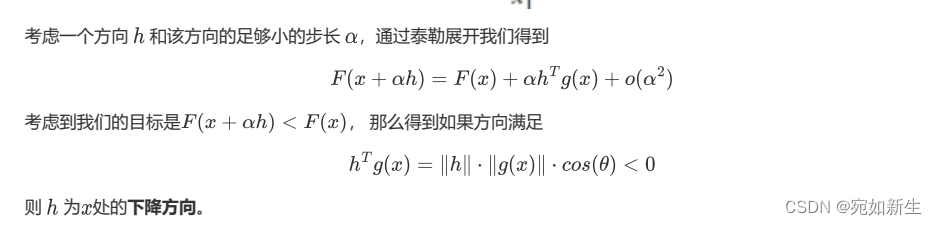
α为我们设定的步长。为了达到使得目标函数值随自变量变化而减少的要求,得出下降方向
h
h
h。
也就是说,我们在
x
x
x点给定一个步长
α
\alpha
α和一个与一阶导方向夹角大于90°的一个方向
h
h
h,则可以保证目标函数值是向减少的方向更新自变量参数的。
2.最速下降法
最速下降法也很简单,顾名思义就是找到使得目标函数变化率最大的那个方向即可。
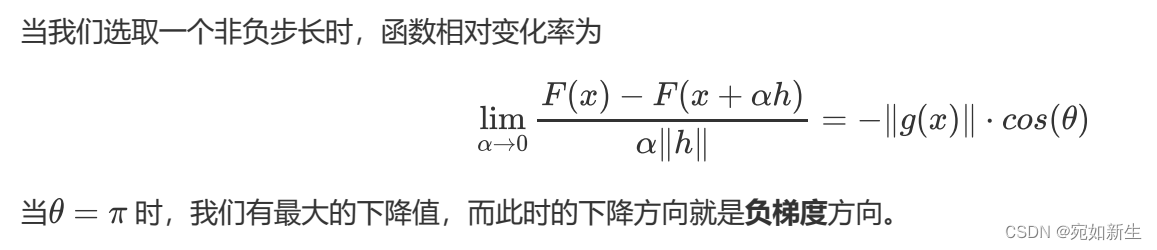
即,当函数梯度和下降方向夹角为
π
\pi
π时,迭代更新最快可以达到最小值。
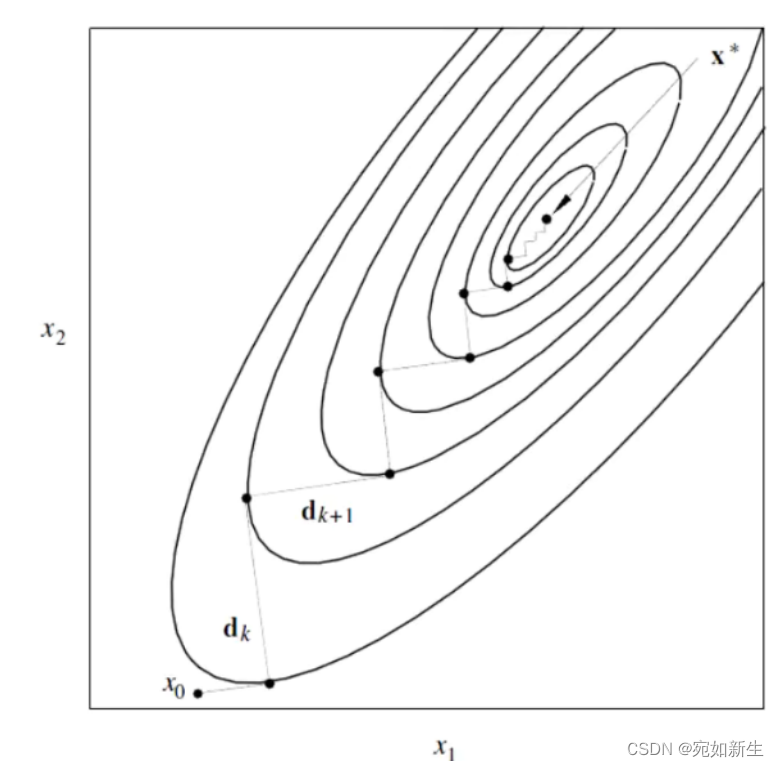
他是有明显缺点的。由于这里面我们要给定他一个非负步长
α
\alpha
α,从上图来看,步长给大了,对后面迭代过程是不友好的,很容易陷入反复,陷入一个死循环。步长给小了效率太低,所以这个
α
\alpha
α很难去合理确定。
3.牛顿法
牛顿法是对最速下降法的一个改进。
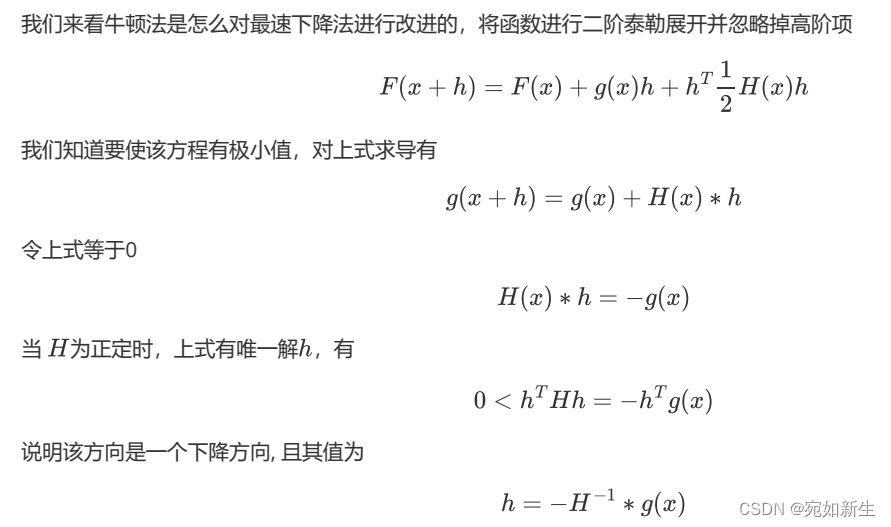
我们通过上面的方法就能直接解出
h
h
h,但这也是有条件的,那就是
H
H
H必须正定,但在实际的工程问题中这很难一直保证。
一般情况下,牛顿法中
α
=
1
\alpha=1
α=1。
牛顿法之所以比最速下降法要好就是因为,牛顿法用了泰勒公式进行了二阶近似。求解出来的
h
h
h受二阶导的影响,接近最小值附近时,$h
$会变得更小来适应最后阶段的迭代。
缺点也很明显,他要计算二阶海森矩阵,这是非常复杂的,加大了计算量。
4.高斯-牛顿法
高斯牛顿法又是对牛顿法的改进。
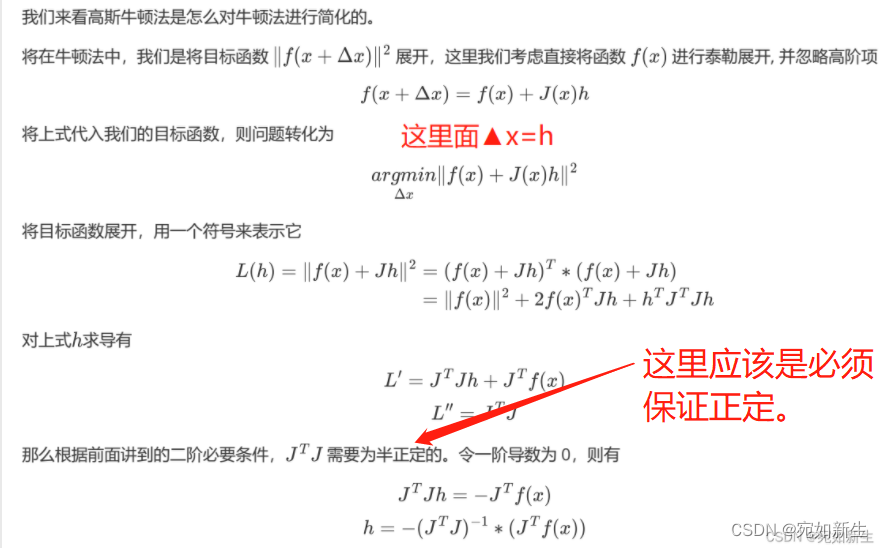
与牛顿法对比,发现高斯牛顿法不是对目标函数进行展开,而是对里面的误差函数
f
(
x
)
f(x)
f(x)进行一阶泰勒展开。代入目标函数,发现得到
J
T
J
h
=
−
J
T
f
(
x
)
J^TJh = -J^Tf(x)
JTJh=−JTf(x),与牛顿法的正规方程形式一致,相当于高斯牛顿法用
J
T
J
J^TJ
JTJ近似了牛顿法中很难计算的
H
H
H。这大大降低了牛顿法的计算量。
缺点就是,实际工程中我们仍不能一直保证 J T J J^TJ JTJ是正定的。而且步长取得不能太大,因为一阶泰勒近似在 x x x附近才能有很好的近似。
5.LM法
LM法正是解决了上面高斯牛顿法无法保证“海森矩阵”为正定以及步长不能太大的缺点。
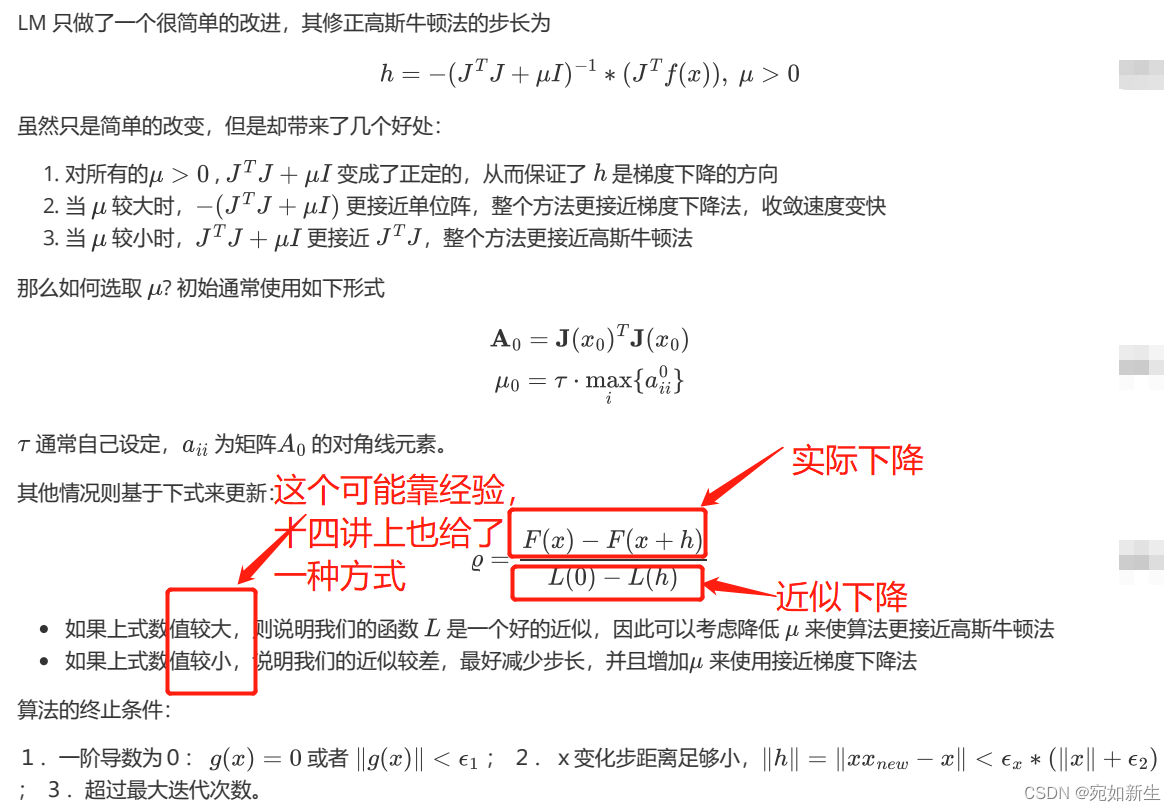
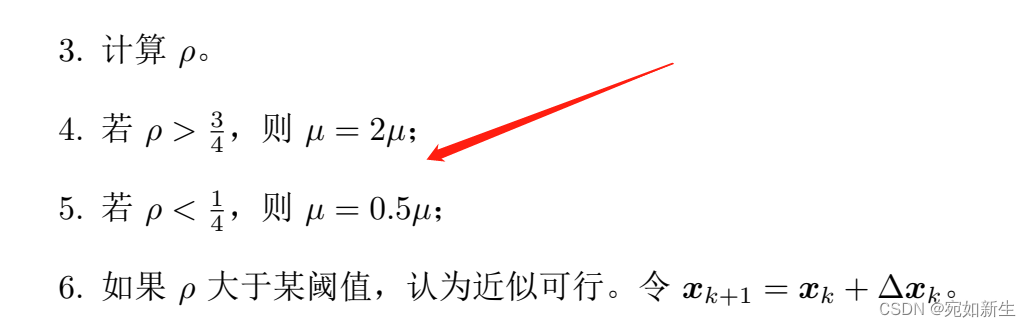
可见,LM法既避免了计算复杂的海森矩阵,又保证了信息矩阵的正定性,同时还合理的选择了更新步长。无疑,是这几个优化方法中最好的优化算法。

















 666
666











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











