







本讲大纲:
1.最优间隔分类器(optimal margin classifier)
2.原始/对偶优化问题(KKT)(primal/dual optimization problem)
3.SVM对偶(SVM dual)
4.核方法(kernels)(简要,下一讲详细)
1.最优间隔分类器
假设给我们的数据集是线性可分的(linearly separable). 就是说用超平面可以分隔正负样本. 我们要找到最大的几何间隔. 我们可以转化为下面的优化问题:
由于||W|| = 1,这保证了函数间隔等于几何间隔,只要解决了上面的优化问题我们就解决了这个问题,但是||W||是一个不好的(非凸性)的限制,这不是我们能够直接用软件解决的优化问题. 因此转化为更好的一个问题:
我们最大化

前面有讨论过对w和b加上任意比例的限制不会改变什么. 因此,加上规模的限制,对训练集的函数间隔设置为1:
因此
上面的优化问题变为一个凸二次目标函数(convex quadratic objective). 这给我们一个最优间隔分类器的解决方案. 这个优化问题可以用商用的二次编程代码解决.
2.原始/对偶优化问题
2.1 拉格朗日二元性(Lagrange duality)
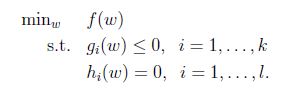
考虑下面形式的问题:
我们可以用拉格朗日乘数法来解决这个问题.
定义Lagrangian为:
这边
然后解出w和

2.2 原始优化问题(primal optimization problem)
定义一般的拉格朗日算子(generalized Lagrangian):


下标”P”表示”prime”, 如果给定的w违反了原始限制(
如果w满足原始限制,那么

考虑最小化问题:

可以看到回到了最初的原始问题. 定义目标的原始值为
一个略微不同的问题:

下标”D”表示”dual”.
2.3 对偶优化问题(dual optimization problem)

同样的,定义目标的对偶值为:

显然:
(函数最小值的最大值肯定小于等于最大值的最小值),在某些条件下,会有
假设f和g是凸函数(黑塞矩阵为半正定的),h为仿射函数(affine,和线性是一样的,只不过是加了截距,

基于上面的假设,肯定存在


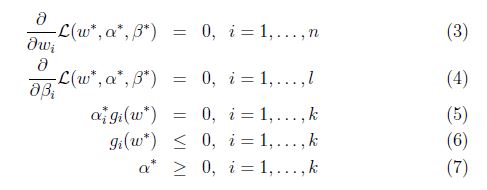
如果
等式(5)称为KKT对偶补充条件(KKT dual complementarity condition). 具体来说,就是如果

3.SVM对偶
前面为了找到最优间隔分类器,提到以下的优化问题(原始优化):
限制可以写为:

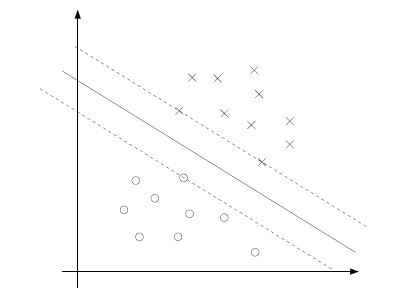
(实线为超平面)
最小的间隔是离决定边界最近的点,上图中有三个(一个负的两个正的),因此对于我们的优化问题只有三个a是不等于零的. (KKT对偶补充条件,只有
为优化问题构建Lagrangian,有:

对w求偏导:

推出:
对b求偏导:
根据上面的式子化简得到:

最后一项为零,进一步得到:

得到以下对偶优化问题:
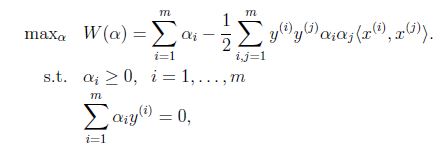
需要满足


再得到:
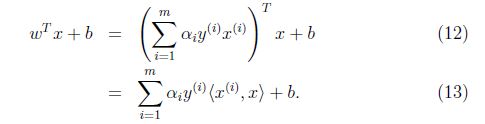
因此如果我们找到了a,为了预测,我们只需要计算x和数据集中点的内积(
4.核方法
有时候训练样本的维数很高,甚至有可能得到的特征向量是无限维的. 通过计算不同方法的内积,利用内积来进行有效的预测.















 3458
3458

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









