







sift描述子
文章目录
1、实验需求
(1)针对自己所处的环境,拍摄多张图片(注意要来自不同场景),构造出一个小的数据集(15张以上)
(2)实现数据集中,每张图片的SIFT特征提取,并展示特征点
(3)给定两张图片,计算其SIFT特征匹配结果
(4)给定一张输入的图片,在数据集内部进行检索,输出与其匹配最多的三张图片
2、语言和平台
语言:python2.7.13 (anaconda2)
平台:pycharm 2018.2
3、算法简介
近年来,提高特征描述点检测与描述有了很大的发展,下面我们会看这其中最好的算法之一——SIFT。
SIFT算法可以解决的问题
• 目标的旋转、缩放、平移(RST)
• 图像仿射/投影变换(视点viewpoint)
• 弱光照影响(illumination)
• 部分目标遮挡(occlusion)
• 杂物场景(clutter)
• 噪声
4、算法原理
1.检测尺度空间极值
其主要思想是通过对原始图像进行尺度变换,获得图像多尺度下的空间表示。 从而实现边缘、角点检测和不同分辨率上的特征提取,以 满足特征点的尺度不变性。尺度空间中各尺度图像的 模糊程度逐渐变大,能够模拟 人在距离目标由近到远时目标 在视网膜上的形成过程。一个 图像的尺度空间,L(x, y, σ) ,定义为原始图像 I(x, y)与一个可变尺度的2 维高斯函数G(x, y, σ) 卷积运算。
G ( x i , y i , σ ) = 1 2 π σ 2 e x p ( − ( x − x i ) 2 + ( y − y i ) 2 2 σ 2 ) G(x_i,y_i,σ)=\frac {1} {2πσ^2}exp(-\frac {(x-x_i)^2+(y-y_i)^2} {2σ^2}) G(xi,yi,σ)=2πσ21exp(−2σ2(x−xi)2+(y−yi)2)
L ( x , y , σ ) = G ( x , y , σ ) ∗ I ( x , y ) L(x,y,σ)=G(x,y,σ)*I(x,y) L(x,y,σ)=G(x,y,σ)∗I(x,y)
2.高斯金字塔
高斯金字塔的构建过程可分为两步:
(1)对图像做高斯平滑;
(2)对图像做降采样。
为了让尺度体现其连续性,在简单下采样的基础上加上了高斯滤波。 一幅图像可以产生几组(octave) 图像,一组图像包括几层 (interval)图像。
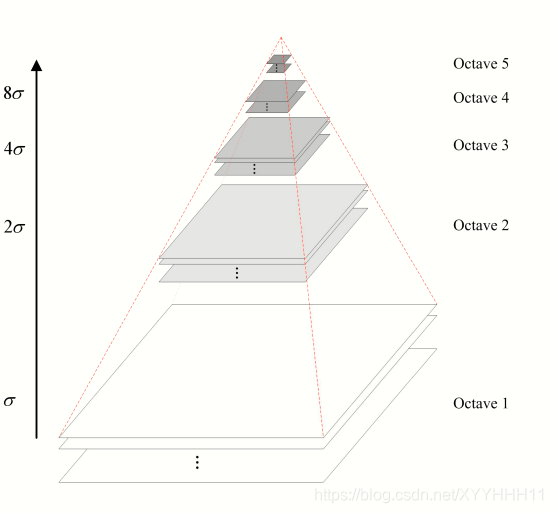
高斯图像金字塔共o组、s层,
则有: σ ( s ) = σ 0 2 s S σ(s)=σ_02^\frac {s} {S} σ(s)=σ02Ss
σ:尺度空间坐标;
s:sub-level层坐标;
σ 0 σ_0 σ0:初始尺度;
S:每组层数(一般为3~5)
最后可将组内和组间尺度归为: 2 i − 1 ( σ , k σ , k 2 σ , . . . , k n − 1 σ ) 2^{i-1}(σ,kσ,k^2σ,...,k^{n-1}σ) 2i−1(σ,kσ,k2σ,...,kn−1σ)
i:金字塔组数
n:每一组的层数
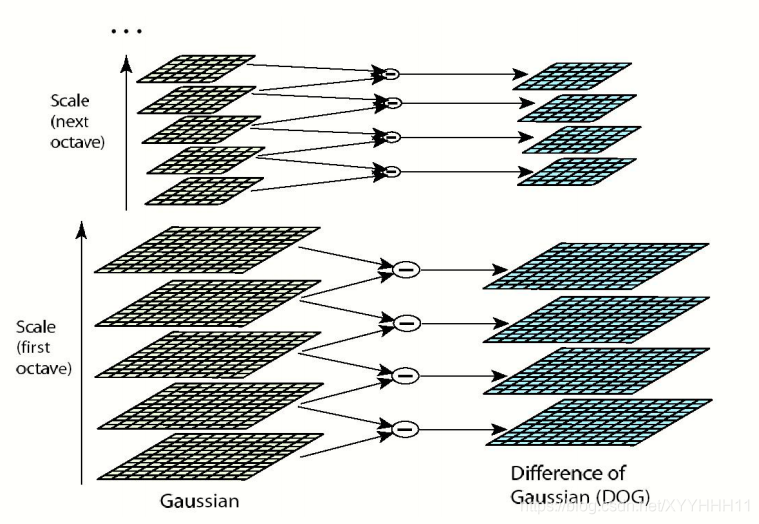
3.关键点检测DoG
L ( x , y , σ ) = G ( x , y , σ ) ∗ I ( x , y ) L(x,y,σ)=G(x,y,σ)*I(x,y) L(x,y,σ)=G(x,y,σ)∗I(x,y)
D ( x , y , σ ) = [ G ( x , y , k σ ) − G ( x , y , σ ) ] ∗ I ( x , y ) D(x,y,σ)=[G(x,y,kσ)-G(x,y,σ)]*I(x,y) D(x,y,σ)=[G(x,y,kσ)−G(x,y,σ)]∗I(x,y)
= L ( x , y , k σ ) − L ( x , y , σ ) =L(x,y,kσ)-L(x,y,σ) =L(x,y,kσ)−L(x,y,σ)
DoG在计算上只需相邻高斯平滑后图像相减,因此简化了计算!
对应DOG算子,需构建DOG金字塔可以通过高斯差分图 像看出图像上的像素 值变化情况。(如果 没有变化,也就没有 特征。特征必须是变 化尽可能多的点。) DOG图像描绘的是目 标的轮廓。
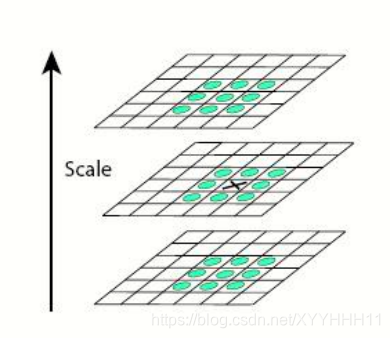
4.DOG局部极值检测
DoG的局部极值点
特征点是由DOG空间的局部极值点组成的。为了寻找DoG函数的极值点, 每一个像素点要和它所有的相邻点比较,看其是否比它的图像域和尺度域 的相邻点大或者小。中间的检测点和它同尺度的8个相邻点和上下相邻尺度对应的9×2个 点共26个点比较,以确保在尺度空间和二维图像空间都检测到极值点。
去除边缘响应
由于DoG函数在图像边缘有较强的边缘响应,因此需要排除边缘响应。 DoG函数的峰值点在边缘方向有较大的主曲率,而在垂直边缘的方向有 较小的主曲率。主曲率可以通过计算在该点位置尺度的2×2的Hessian矩 阵得到,导数由采样点相邻差来估计:
[ D x x D x y D x y D y y ] \begin{bmatrix} D_{xx} & D_{xy} \\ D_{xy} & D_{yy} \\ \end{bmatrix} [DxxDxyDxyDyy]
Dxx 表示DOG金字塔中某一尺度的图像x方向求导两次。
D的主曲率和H的特征值成正比。令 α ,β为特征值,则
T r ( H ) 2 d e t ( H ) = ( α + β ) 2 α β \frac {Tr(H)^2} {det(H)}=\frac {(α+β)^2} {αβ} det(H)Tr(H)2=αβ(α+β)2
d e t ( H ) = α β det(H)=αβ det(H)=αβ
t r a c e ( H ) = α + β trace(H)=α+β trace(H)=α+
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1647
1647











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









