







 本文详细解释了梯度在搜索算法中的几何意义,包括其作为改进方向的基础、与曲面、法线和切面的关系,以及在梯度下降和最速下降方法中的应用。强调了梯度方向与优化问题目标值的关系。
本文详细解释了梯度在搜索算法中的几何意义,包括其作为改进方向的基础、与曲面、法线和切面的关系,以及在梯度下降和最速下降方法中的应用。强调了梯度方向与优化问题目标值的关系。
之前一直使用梯度法,本文系统整理一下梯度的几何解释,为后面搜索算法的理解打基础。参考文献:运筹学(原书第2版)—[美]罗纳德L.拉丁(Ronald L.Rardin) http://www.cmpedu.com/books/book/2066930.htm
http://www.cmpedu.com/books/book/2066930.htm
1. 方向步长(direction-step) 范式
“方向步长范式是几乎所有搜索算法的核心。”
其中 是步长,
是搜索方向。
定义1:如果对于足够小的
,都有
的目标值优于
,则称
是当前解的一个改进方向(improving direction)。
定义2:如果对于足够小的
2. 曲面、法线、切面与梯度的关系
任意可微函数 的梯度为
由于每个偏导数都是目标函数在当前解的斜率或者随坐标方向变化的变化率,因此梯度描述了目标函数的形状。下面描述梯度与曲面的法线的关系。
梯度在函数图像上是切线,指向函数值增大的方向;在等高线图上是法向量,指向函数值增大的方向。
例:(参考:直观上理解“梯度”与“法向量”的关系 - 知乎)假设 是一个三维曲面,实际上这可看作是函数
一个等高面,如图2.1所示。曲面上的某一个点
的法向量为
,该点的切面上的任意一个向量
与法向量垂直(注:
表示一个
指向
的向量),则可得到曲面/等高面
的切面方程为
因此,一个函数
的梯度方向是
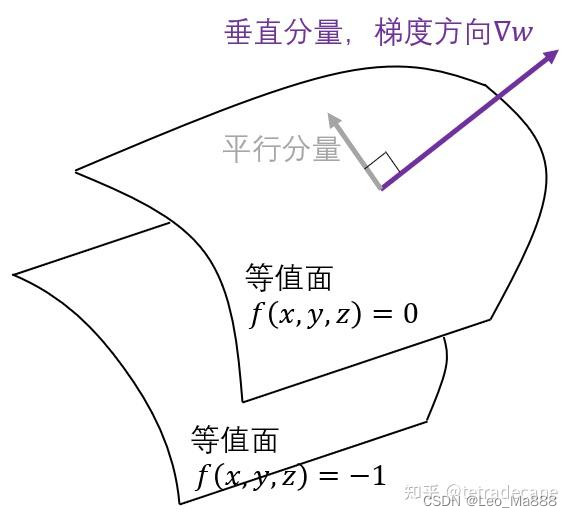
图2.1 曲面、法线和梯度的关系
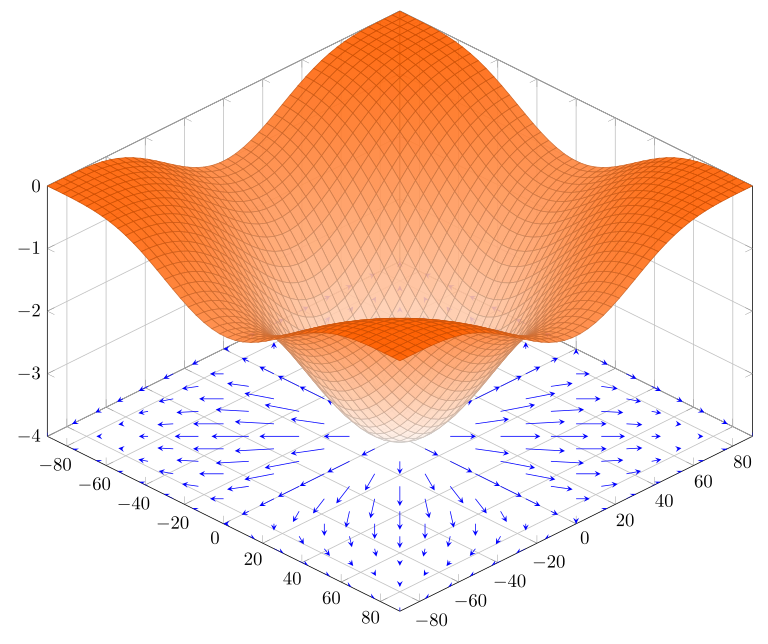
图2.2 梯度在函数图像上是切线方向
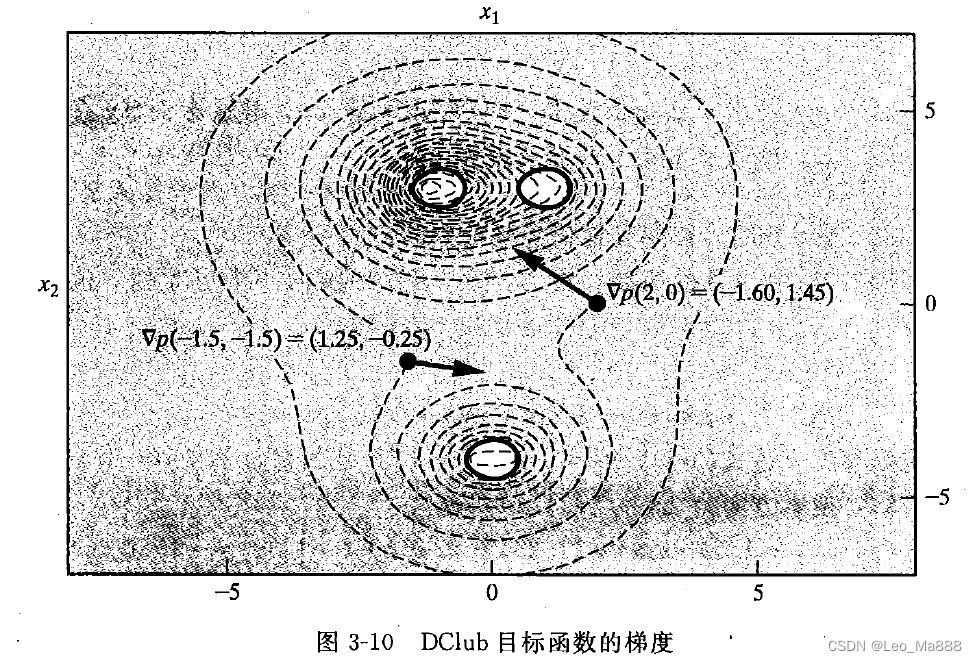
图2.3 梯度垂直于等值线
3. 梯度与改进方向的代数关系
考虑函数 ,记
是一个等值面,则由上节可知该等值面在
处的切面方程为
所以,即当步长
足够小时,有
函数值的变化量
因此,对于最小化问题,如果
,则
所以可以直接使用梯度 作为改进方向,即梯度下降法或最速下降法。
从几何的角度讲,对于最小化问题,改进方向需要与梯度方向的夹角大于90°;对于最大化问题,改进方向需要与梯度的夹角小于90°。

















 1510
1510

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









