









EM算法源自论文Baidu Apollo EM Motion Planner,是Apollo早期版本的主要规划器,算法框架中带有决策(即DP、轻决策)。
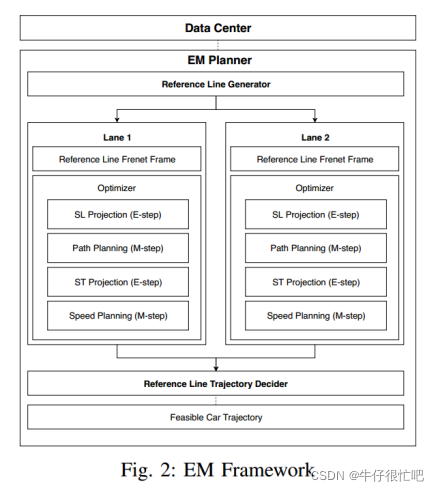
虽然Apollo已经将主要规划器修改为piecewise jerk optimization,但其思想仍具有借鉴意义,尤其是在速度规划中,目前还是采用的DP+QP的解决方案。
Apollo 6.0的EM Planner (1):路径规划的动态规划DP过程 - 知乎
Apollo 6.0的EM Planner (2):路径规划的二次规划QP过程 - 知乎
Apollo 6.0的EM Planner (3):速度规划的动态规划DP过程 - 知乎
Apollo 6.0的EM Planner (4):速度规划的二次规划QP过程 - 知乎
Baidu Apollo代码解析之EM Planner中的DP Path Optimizer - 知乎
Baidu Apollo代码解析之EM Planner中的QP Path Optimizer 1 - 知乎
Baidu Apollo代码解析之EM Planner中的QP Path Optimizer 2 - 知乎
Baidu Apollo代码解析之EM Planner中的QP Path Optimizer 2b - 知乎
Baidu Apollo代码解析之EM Planner中的QP Path Optimizer 3 - 知乎
Baidu Apollo代码解析之EM Planner中的QP Speed Optimizer 1 - 知乎
Baidu Apollo代码解析之EM Planner中的QP Speed Optimizer 2 - 知乎
Baidu Apollo代码解析之EM Planner中的DP Speed Optimizer - 知乎
Apollo EM Planner阅读笔记_qyshen815的博客-CSDN博客
Apollo EM中path_assesment_task相关细节的讨论 - 知乎
论文研读笔记--"Baidu Apollo EM Motion Planner" - Challenging-eXtraordinary
path optimization and piecewise jerk optimization · Issue #9599 · ApolloAuto/apollo · GitHub



















 6602
6602

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











