







在对视频图像进行分析处理的时候首先需要对所获取的监控视频进行相机标定,以此来获取相机的内参和外参,然后对由于相机本身因素和相机镜片因素所导致的畸变(径向、切向)校正,得到可用于空间分析和处理的视频图像。在此我们要对相机进行标定,首先需要了解相机成像模型。
空间中的一点的位置坐标要转化为图像中的像素点坐标,需要经历如下四个步骤:
1、 假设空间中一点世界坐标(3维点):(Xw,Yw,Zw)
2、 相机坐标(3维点):(Xc,Yc,Zc)
3、 像平面坐标(2维点):(x,y)
4、 像素点坐标(2维点):(u,v)
在此我们引用一个图进行解释各个坐标系之间的关联:

世界坐标系中坐标是显示世界中构建的坐标系;相机坐标系中的坐标是以相机光心为原点构建的坐标系,其主要是为了将相机作为原点;像平面坐标系是以光心映射到物理成像平面为原点构建的坐标系;像素平面坐标系是在物理成像平面上以左上角为原点构建的坐标系(有利于计算机处理图像)。因此相机成像模型的过程就是:由世界坐标系->相机坐标系->像平面坐标系->像素坐标系。
1、世界坐标系->相机坐标系
由世界坐标系到相机坐标系,主要是两个坐标系的旋转和平移变换,可用如下矩阵表示:

式中R,t代表相机的外参,其中R为旋转矩阵,t为平移矩阵。
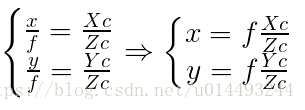
2、相机坐标系 ->像平面坐标系(利用相似三角形)
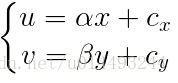
2、像平面坐标系 ->像素平面坐标系
像素坐标是光在平面成像的一个模拟量,所以需要对成像平面上的像进行采样和量化,得到物体的像在像素平面上的坐标值。像素平面与成像平面之间,相差一个缩放和原点的平移。如下式所示,在u轴上放大了α倍,在v轴上放大β倍,原点平移cx,cy。
将(2)和(3)结合起来,可改写为下式:

以齐次方程的形式表示:

融合(5)和(1)式:

这就是最终的计算结果,当然以上过程未考虑畸变,在实际应用过程中还需要考虑畸变。畸变包括径向畸变和切向畸变。
径向畸变:
成像仪光轴中心的畸变为0,沿着镜头半径方向向边缘移动,畸变越来越严重。畸变的数学模型可以用主点(principle point)周围的泰勒级数展开式的前几项进行描述,通常使用前两项,即k1和k2,对于畸变很大的镜头,如鱼眼镜头,可以增加使用第三项k3来进行描述,成像仪上某点根据其在径向方向上的分布位置,调节公式为:
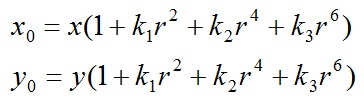
公式里(x0,y0)是畸变的原图上像素点的位置;(x,y)是校正后输出图像上像素点的位置。
实现过程是,对输出图的点做遍历——以1080p的图像为例,从点(0,0)到点(1919,1079),一行一行的遍历——依次找到输出点(x, y)对应的原图点(x0, y0)的像素值,再将(x0, y0)的值赋给(x, y)。如果计算出来的对应的原图的点(x0, y0)不是整数,则用二次线性插值计算此点,然后赋值给(x, y)。
切向畸变一般不用考虑,因为切向畸变产生的原因是由于成像平面与镜头不重合,但由于制作技术的精良,现在这种情况很少发生。
(本文综合自网上多类资源,加上自己的理解,如有侵权,请联系删除)















 2762
2762











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









