






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
使用可穿戴A模式超声估算动态活动中的关节扭矩研究
摘要
人体在日常生活和运动中不断经历各种机械负荷。量化肌肉骨骼系统内的内部负荷,尤其是动态活动中的负荷,对于理解肌肉功能、预防损伤和康复至关重要。然而,传统测量方法往往局限于实验室环境,而现有的可穿戴技术在动态运动过程中缺乏肌肉特异性和准确性验证。本研究提出了一种创新的策略,利用可穿戴A模式超声技术,在各种动态活动中从具有不同结构的肌肉中估计相应的关节扭矩。通过跟踪肌肉厚度变化,我们在肘部和膝盖的扭矩估计中实现了小于7.6%的误差,并在受控等速收缩期间获得了大于0.92的决定系数(R²)。此外,我们还在举重、骑自行车、跑步机运动和室外运动等现实任务中展示了可穿戴关节扭矩估计的可行性。这一技术为肌肉功能和运动生物力学提供了新的见解,并在预防损伤和康复领域具有广泛的应用前景。
引言
肌肉骨骼系统的内部负荷量化是运动科学、康复医学和生物力学领域的重要研究内容。传统上,关节扭矩的测量依赖于复杂的实验室设备,如等速测力计或光学运动捕捉系统,这些设备不仅昂贵,而且限制了测量场景。近年来,虽然一些可穿戴设备被开发出来用于动态活动监测,但这些设备在肌肉特异性和准确性方面仍存在不足。因此,开发一种准确、可穿戴且适用于各种动态活动的关节扭矩估计方法具有重要意义。
方法
1. A模式超声技术
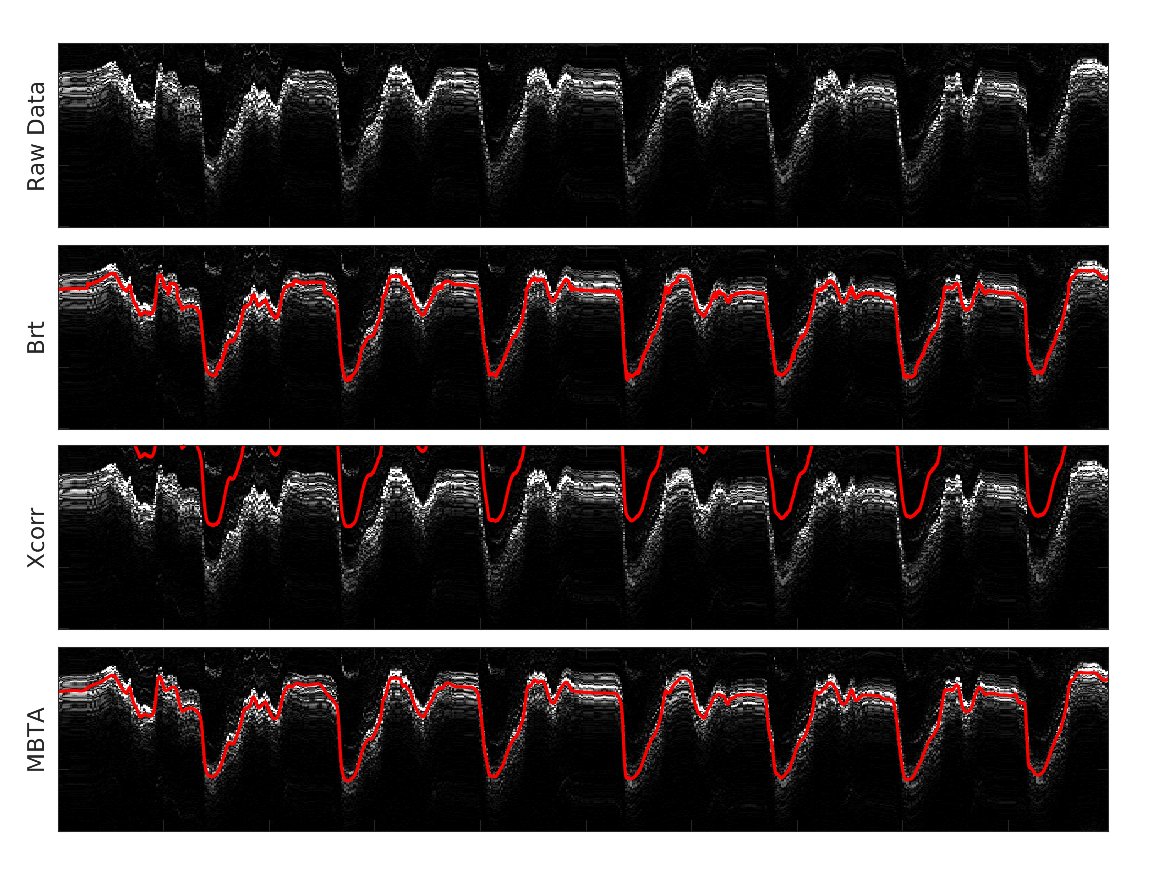
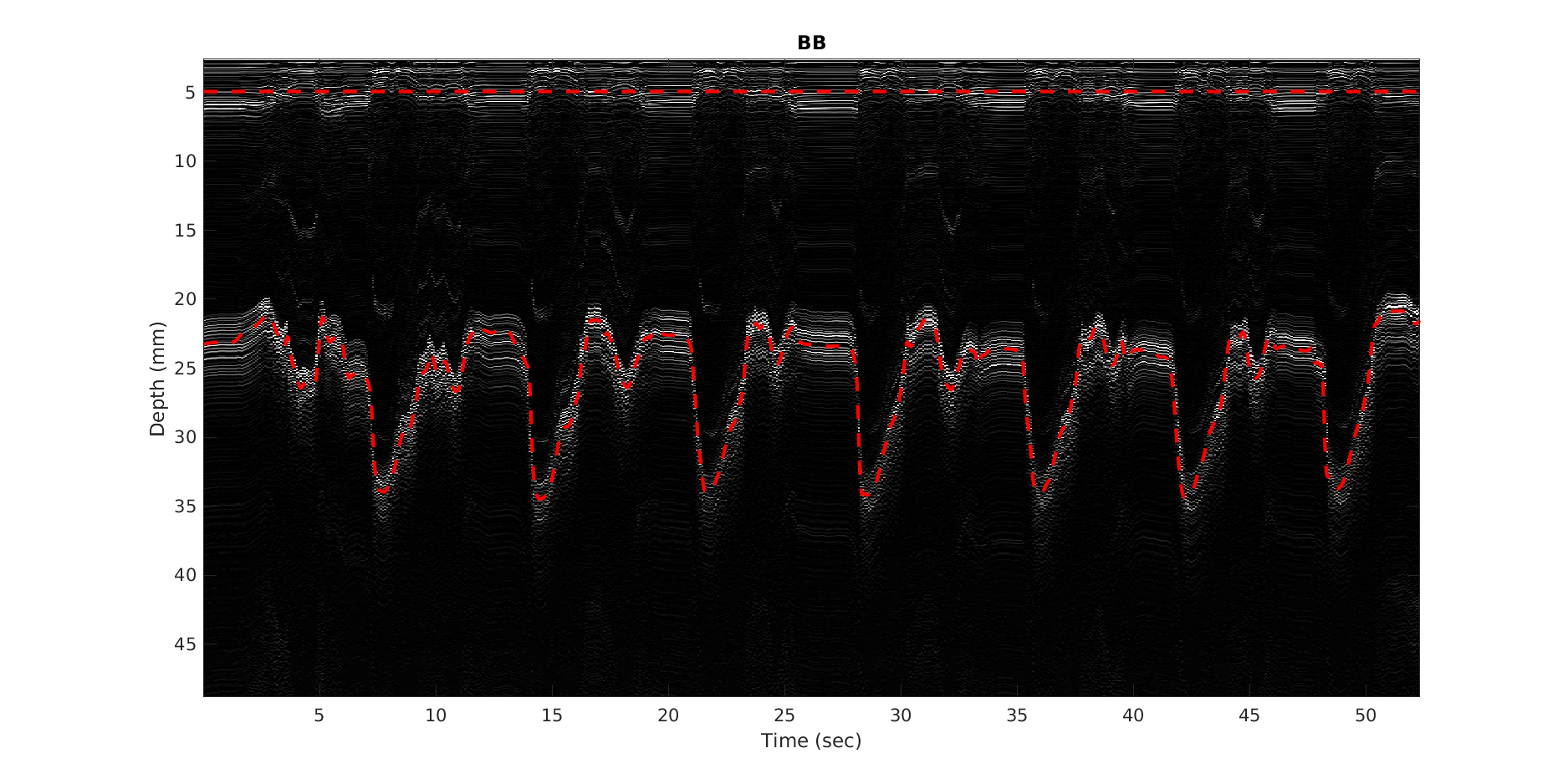
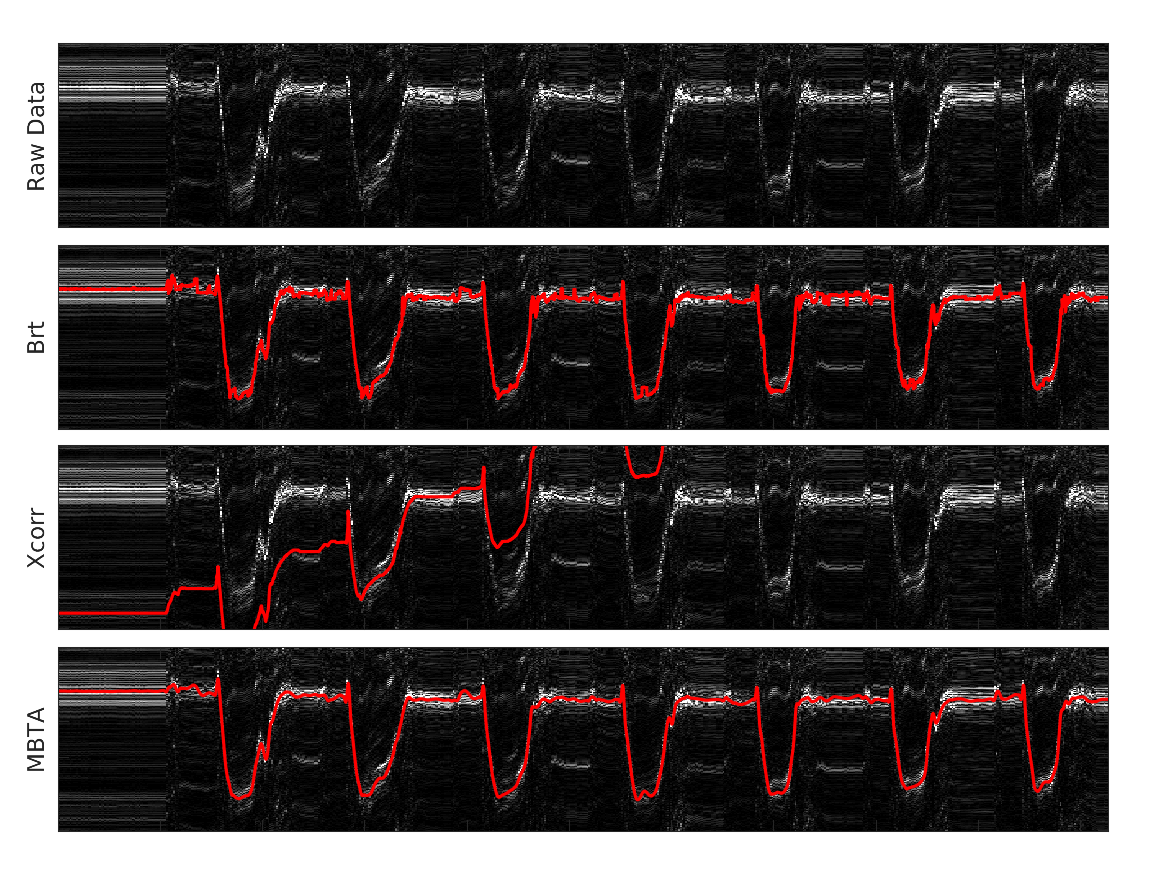
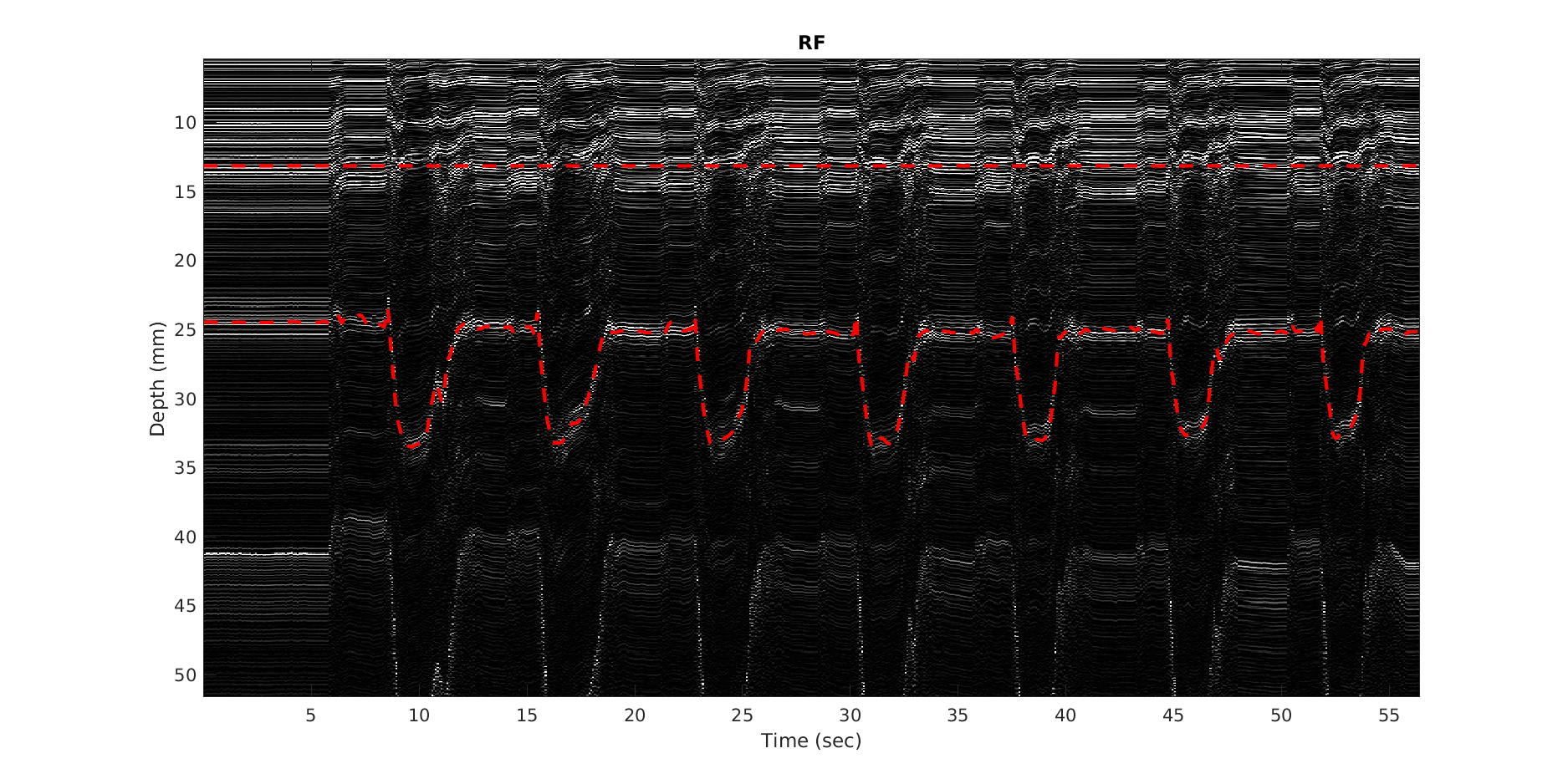
A模式超声技术是一种通过测量超声波在组织中传播的速度和时间来评估组织特性的方法。在本研究中,我们采用单元件超声换能器,通过连续发送超声波并接收反射信号,实时跟踪肌肉厚度的变化。
2. 肌肉厚度变化与关节扭矩的关系
肌肉在收缩过程中会产生厚度变化,这种变化与关节扭矩之间存在一定的相关性。我们通过实验标定,建立了肌肉厚度变化与关节扭矩之间的数学模型。
3. 受控等速收缩实验
为了验证模型的准确性,我们首先进行了受控等速收缩实验。通过等速测力计控制关节的运动速度和力量,同时记录肌肉厚度变化和关节扭矩,用于模型的训练和验证。
4. 动态现实任务实验
在验证了模型在受控条件下的准确性后,我们进一步将其应用于动态现实任务中,包括举重、骑自行车、跑步机运动和室外运动。通过佩戴可穿戴A模式超声设备,实时记录肌肉厚度变化,并估计关节扭矩。
结果
1. 受控等速收缩实验结果
在受控等速收缩实验中,我们发现肌肉厚度变化与关节扭矩之间具有良好的相关性。通过建立的数学模型,我们在肘部和膝盖的扭矩估计中实现了小于7.6%的误差,决定系数(R²)大于0.92。
2. 动态现实任务实验结果
在动态现实任务中,可穿戴A模式超声设备成功地实时记录了肌肉厚度变化,并估计了关节扭矩。尽管动态活动中的肌肉活动模式更为复杂,但我们的方法仍然能够在举重、骑自行车、跑步机运动和室外运动等任务中提供可靠的关节扭矩估计。
讨论
本研究提出了一种利用可穿戴A模式超声技术估计动态活动中关节扭矩的新方法。通过跟踪肌肉厚度变化,我们实现了对关节扭矩的准确估计。这种方法不仅具有肌肉特异性,而且适用于各种动态活动,为肌肉功能和运动生物力学提供了新的研究工具。
然而,本研究也存在一些局限性。例如,虽然我们在多个动态任务中验证了方法的可行性,但样本量相对较小,未来需要更大规模的实验来进一步验证其准确性和可靠性。此外,虽然A模式超声技术具有实时性和可穿戴性,但其分辨率和穿透深度仍有待提高,以更好地满足实际应用需求。
结论与展望
本研究利用可穿戴A模式超声技术,在各种动态活动中从具有不同结构的肌肉中成功估计了相应的关节扭矩。通过跟踪肌肉厚度变化,我们实现了对关节扭矩的准确估计,并在受控等速收缩和动态现实任务中验证了方法的可行性。这一技术为肌肉功能和运动生物力学提供了新的见解,并在预防损伤和康复领域具有广泛的应用前景。
未来,我们将继续优化算法和硬件设备,提高测量准确性和可靠性。同时,我们将开展更大规模的实验,进一步验证该方法在不同人群和动态活动中的适用性。此外,我们还将探索将该方法与其他生物力学参数(如关节角度、肌肉激活程度等)相结合,以提供更全面的肌肉骨骼系统负荷评估。
📚2 运行结果
部分代码:
function [ha, pos] = tight_subplot(Nh, Nw, gap, marg_h, marg_w)
% tight_subplot creates "subplot" axes with adjustable gaps and margins
%
% [ha, pos] = tight_subplot(Nh, Nw, gap, marg_h, marg_w)
%
% in: Nh number of axes in hight (vertical direction)
% Nw number of axes in width (horizontaldirection)
% gap gaps between the axes in normalized units (0...1)
% or [gap_h gap_w] for different gaps in height and width
% marg_h margins in height in normalized units (0...1)
% or [lower upper] for different lower and upper margins
% marg_w margins in width in normalized units (0...1)
% or [left right] for different left and right margins
%
% out: ha array of handles of the axes objects
% starting from upper left corner, going row-wise as in
% subplot
% pos positions of the axes objects
%
% Example: ha = tight_subplot(3,2,[.01 .03],[.1 .01],[.01 .01])
% for ii = 1:6; axes(ha(ii)); plot(randn(10,ii)); end
% set(ha(1:4),'XTickLabel',''); set(ha,'YTickLabel','')
% Pekka Kumpulainen 21.5.2012 @tut.fi
% Tampere University of Technology / Automation Science and Engineering
if nargin<3; gap = .02; end
if nargin<4 || isempty(marg_h); marg_h = .05; end
if nargin<5; marg_w = .05; end
if numel(gap)==1;
gap = [gap gap];
end
if numel(marg_w)==1;
marg_w = [marg_w marg_w];
end
if numel(marg_h)==1;
marg_h = [marg_h marg_h];
end
axh = (1-sum(marg_h)-(Nh-1)*gap(1))/Nh;
axw = (1-sum(marg_w)-(Nw-1)*gap(2))/Nw;
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1] Jin, Y., Alvarez, J.T., Suitor, E.L. et al. Estimation of joint torque in dynamic activities using wearable A-mode ultrasound. Nat Commun 15, 5756 (2024).
🌈4 Matlab代码、数据、文章
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









