










 本文详细探讨了数字高程模型的起源、重要性,以及各种采集方法(摄影测量、LIDAR、纸质地图等)的对比。深入分析了DEM的高保真特性,包括不同内插方法的特性,并揭示了数字环境下地貌数据的特点。最后,介绍了基于等高线图生成DEM的几种策略,如离散化、构TIN和内插方法。
本文详细探讨了数字高程模型的起源、重要性,以及各种采集方法(摄影测量、LIDAR、纸质地图等)的对比。深入分析了DEM的高保真特性,包括不同内插方法的特性,并揭示了数字环境下地貌数据的特点。最后,介绍了基于等高线图生成DEM的几种策略,如离散化、构TIN和内插方法。
【合辑】数字高程模型科普
文章目录
一、数字高程模型的提出、演变、重要性及定义
数字高程模型(Digital Elevation Model)的概念从20世纪50年代被提出以来就受到了极大的关注。但也经历了一个循序渐进的发展过程。20世纪50年代中期到60年代初,数字高程模型的建立只能满足特定的行业和专业部门的应用需求,并未成为一种象地图一样的标准产品。
从60年代开始,随着数据库、可视化等计算机相关技术的迅速发展,逐步建立起国家范围和区域范围的地理信息系统(GIS)和空间数据库成为了数字时代政府和相关行业所关注的热门的话题。DEM作为标准的基础地理信息产品也开始大规模的生产。目前,在美国、中国、德国、英国、日本等许多国家,数字高程模型己经成为国家空间数据基础设施(NSDI)的基本内容之一。
我国国家基础地理信息库建设于1999年前后启动,相继完成了全国范围的1:100万DEM, 1:25万DEM,1:5万DEM、七大江河重点防范区1:1万DEM和长江三峡库区1:5万DEM,全国各省1:1万DEM正在建设之中。
图1 某区域的DEM
近些年来随着科学技术的迅速发展,在DEM数据的获取方法、数据存储和数据处理速度方面已经取得了一些突破性进展。激光扫描(Light/Laser Detection And Ranging,LIDAR/LADAR)系统,特别是集成了高精度惯性导航系统(Intertial Navigation System,INS)、全球定位系统(Global Positioning System,GPS)的机载激光雷达(Air Laser Scanning,ALS)已经能较好地满足和实现人们对现代测量的需求,已经被广泛地应用于生产高精度、高密度的数字模型的生产,如DEM,DTM,应用于海岸工程与水道测量、植被测量、建筑物模型的三维重建等领域。
数字高程模型是地球信息科学最重要的基本概念之一,经历了五六十年的发展,历史上出现了许多术语。如德国的DHM(Digital Height Model)、英国的DGM(Digital Ground Model)、美国USGS使用的DTEM(Digital Terrain Elevation Model)、DEM(Digital Elevation Model)等。这些术语的实质性差别并不大。但是从DEM到数字地形模型(Digital Terrain Model,DTM),概念得到了更为丰富的拓展,后者更注重数字高程模型表达的地形信息特征,包括基于数字高程模型的各种线形和非线性运算,所以DEM和DTM有着包含关系:DEM属于DTM(汤国安,2005)。
数字高程模型(DEM)是DTM的特定类型,是关于地面某指定区域的高程的模型表达。下表列举了历史上几个典型的有关DEM的定义。
表1 数字地面模型、数字高程模型的定义(引自汤国安,2005,增补)
| 学者 | 定义 |
|---|---|
| Miller(1958) | 数字地面模型是利用一个任意坐标场中大量选择的已知X,Y,Z的坐标点对连续地面的一个简单统计表示 |
| Doyle(1978) | 数字地面模型时描述地面特性空间分布的有序数值阵列,在一般情况下,记录的特性为高程值,其分布由x,y平面系统来描述。也可以通过经纬度描述海拔分布。DTM可以是每个三位坐标值为一组散点结构,也可以是由多项式或傅里叶级数确定的曲面方程。另外数字地面模型可以包含除高程外的其他地面特性,如地价、土地权属、土壤类型、岩层等。 |
| 王之卓(1979) | 数字地面模型是地形表面用x,y,z坐标的数字形式的一种表达 |
| Burrough(1986) | 数字高程模型是以数字形式表示的局部地球表面的量化模型,有时也称为数字地形模型 |
| Weibel(1991) | 数字地形模型是局部地形的数字化表达 |
| 龚建雅(1993) | 数字地面模型DTM是定义在二维区域上地形特征空间分布及关联信息的一个n维向量序列{Xi},数值高程模型DEM是DTM的一个子集,它表示地形框架分布的一个有限三维向量序列{Xi,Yi,Zi},其中Xi, Yi表示地形点的平面位置,Zi表示相应点的高程 |
| 汤国安(2005) | 数字高程模型是通过有限的地形高程数据采样点用某种规则连接成一系列曲面或平面片的集合。DEM={Mi=ζ(Pj) |
| 胡鹏(2007) | DEM是关于地表面某指定地域上n个有序点集上的高程函数值或向量序列,它是该n个有序点集上区域地面高程的数字抽象 |
图2 某矿山区域的DEM
二、DEM的重要性
数字高程模型(Digital Elevation Model)是国家级地球信息基础产品之一,也是当今所有地理信息系统(GIS)教科书和几乎所有测量学教科书中的基础内容之一。
图1 某区域DEM
横跨工程测量、摄影测量、地图制图等多个传统学科。数字高程模型作为地形表面的一种数字表达,具有传统地形图无法比拟的优点。其应用十分广泛,几乎遍及所有行业和应用领域。包括测绘、地质、地理等测绘科学研究领域,和水利、交通、城建等经济部门,对国防建设等均具有重要意义,并具有巨大的经济技术价值。
随着数据库等相关技术的迅速发展,逐步建立起国家范围和区域范围的地理信息系统(GIS)和基础地理数据库成为政府部门和各行业所关注的重点。数字高程模型己经成为许多国家的国家空间数据基础设施(NSDI)的基本内容之一,被纳入数字化空间数据框架进行规模化生产。
图2某区域DEM
然而值得注意的是,不论是理论上还是实际应用,有关DEM本身和基于DEM的应用分析,还有大量不同层次悬而未决的尺度问题摆在我们的面前(汤国安等,2006;胡鹏等,2007),如DEM精度、DEM尺度、DEM质量等。
三、DEM的主要采集方式
3.1 摄影测量方法
其原理是用立体像对来恢复三维表面的立体模型,然后在立体模型上量测地物的三维空间坐标以代替野外测量。从信息获取的方式上,可分为航空/航天摄影测量、地面摄影测量两大类。
目前在我国全数字化摄影测量的理论和方法已经成熟并大量地应用于国家基础地理信息的生产,全数字化摄影测量方法用于生产DEM的方式有两种:
①全自动方法。即除了内定向、相对定向、绝对定向等几个步骤中需要少量的人工干预及质量检查外,影像相关、DEM采集等全部由计算机自动完成。
②交互式方法。即先由计算机自动相关得到一个粗(分辨率低)的DEM,然后由人工识别、采集地形结构线。以附加地形特征的数据和粗DEM为基础,内插出目标分辨率的DEM,并进行相应的质量检查。显然交互式方法能够得到更加可靠且精度更高的DEM产品。
3.2 合成孔径雷达干涉测量方法
合成合成孔径雷达干涉测量方法(InSAR),目前主要是针对机载或星载合成孔径雷达所获得的多幅同一地区的雷达影像进行联合处理来提取地球表面信息。
其用来生成DEM的主要是想是利用相邻像素间的干涉相位差异值的相互关系来处理数据,如何确定绝对干涉相位差,即相位解缠,和基线参数是InSAR数据处理的关键所在。生产DEM的主要流程包括主从影像的配准及重采样,地形干涉相位图处理(包括相位解缠),基线参数的确定,几何转换等步骤。
3.3 机载激光扫描数据采集方法
机载激光扫描系统又被称为机载激光雷达(LIDAR)。它是测绘困难地区,如森林、密集的城区等的新的技术方案。目前激光测量的高程绝对精度可达15cm,相对精度能够达到5cm,平面精度1mm-3cm,因而系统较为昂贵。
其工作的主要原理是利用主动遥感原理,机载激光雷达发射激光信号,经由地面反射后到系统的接收器,通过计算发射信号和反射信号之间的相位差或时间差,来获得地面高程信息。目前激光扫描用于生产DEM的高程精度达10cm,空间分辨率达0.5m。
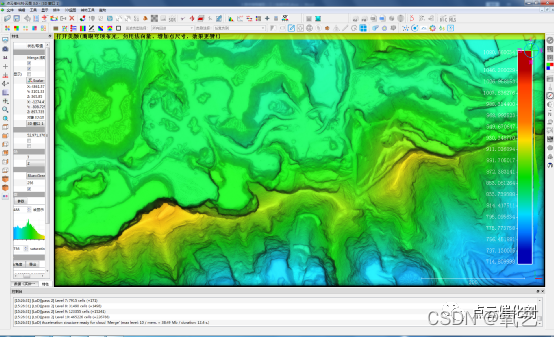
图1 某区域的DEM
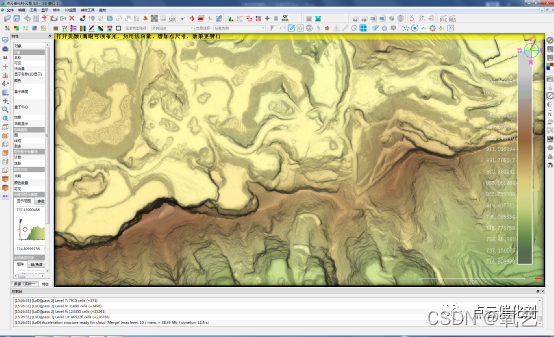
图2 某区域的DEM
3.4 由纸质地形图采集DLG
从纸质地形图采集DLG是最基本的一种生产方式,因为资料源的获取相对容易,采集速度也较高,所以是目前世界各国生产DEM最常见的一种方式。从纸质地形图生产DEM的途径是从地形图获取数字化线划图(DLG),然后用DLG内插生成DEM。矢量化方法有两种形式:一种是手扶跟踪数字化,另一种是地形图扫描数字化。
3.5 从地面直接采集(地形)数据
从地面直接采集数据的方法有很多种,如使用GPS、激光扫描、全站仪或经纬仪等设备或仪器进行野外地形数据采集。尽管这种方法劳动强度大,效率低,但是在小范围内采集地形数据时,为了保证地形数据精度,总是选择地形的特征点、特征线进行采样。
这种方法用于DEM数据生产也需要进行数据预处理、内插等步骤。目前基于车载或机载的高精度高分辨率的DEM直接获取已经成为现实,采用无反射的激光扫描测距技术获取DEM数据通常包括激光扫描数据采集,原数据预处理以及通过滤波从地面中区分建筑物和植被等技术环节。
四、DEM采集方式对比
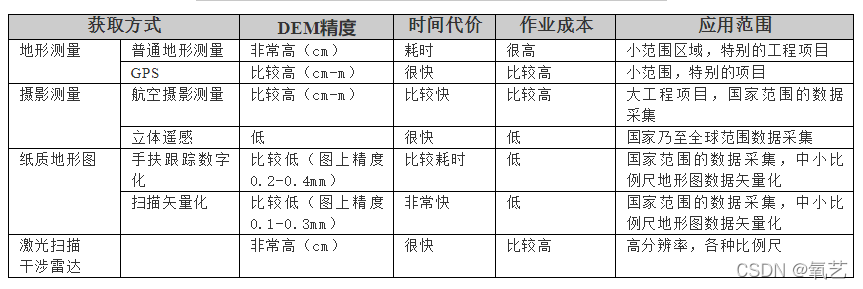
对于DEM的采集方法可以从性能、成本、时间代价、精度等几个方面进行比较分析。就精度而言,野外测量方式是最高的,而且地形特征可以得到充分的顾及,但此方式的人工作业量大;从时间效率看,激光扫描、干涉雷达等新技术无疑有非常好的前景。
但是综合来看,在我国目前的实际生产中,摄影测量方法和利用现有纸质地图采集DLG数据两种方法是最为适用最为普遍的方法。前者自动化程度较高,并且交互式摄影测量可以较好地顾及地形特征;后者则以方便适用为特点,因为在任何国家都有几乎覆盖本国范围的多个尺度的地形图。表1 关于DEM采集方法的比较分析是摘自李志林(2003)的“数字高程模型”。
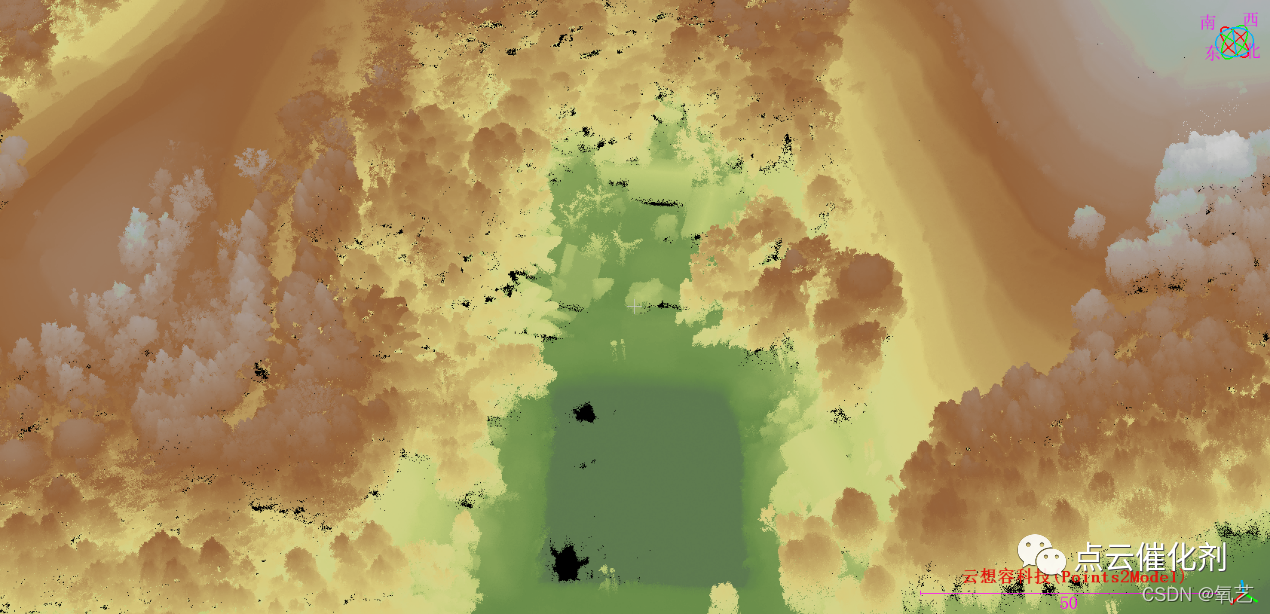
表1 DEM数据采集方法对比分析(引自李志林,2003,改编)
五、DEM类型
DEM的类型可以有多种方式,这里引用李志林等(2003)、汤国安等(2005)的分类体系,如表1。
表1 数字高程模型的分类体系(引自汤国安,2005)
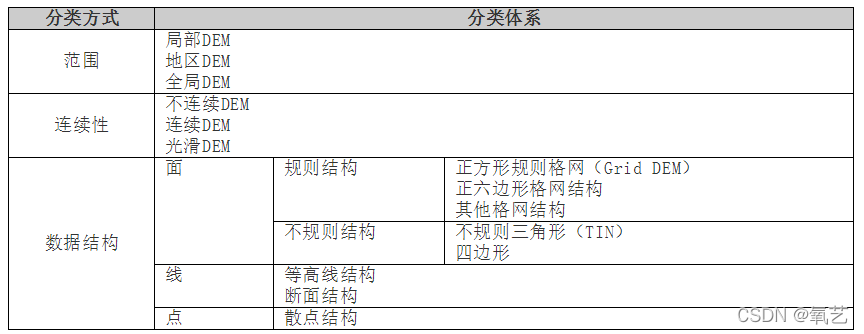
本文约定Grid DEM特指正方形规则格网表示的连续表面模型;TIN特指不规则三角形表示的连续表面模型。文中的DEM综合生成是在Grid DEM到Grid DEM的的尺度变换基础上实现的。
图1是几种常见的数字高程模型的形式,即等高线模型、面栅格DEM,格网点栅格DEM(Grid DEM)、和三角网模型(TIN)。其中面栅格DEM为不连续DEM,其它三个为表面连续模型。
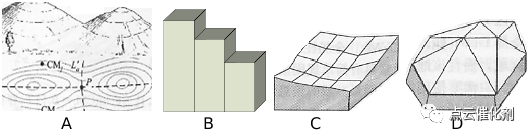
图1 几种常见的DEM,(A)等高线,(B)面栅格DEM,(C)Grid DEM,(D)TIN
六、DEM高保真特性分析
6.1 DEM高保真的含义
DEM是对地形表面的一种逼近,为了评定内插方法和内插生成的DEM质量,除了精度之外,还要求生成的DEM是高质量或高保真的。误差小跟高保真是不同概念:误差小只说明它每一个点位离真实位置距离不大, 并不表明各点之间高程关系真实性。
高质量和高保真在这里是同义词,它是指DEM在满足一定精度要求前提下,还应该具有的保持原始三维数据的高程逻辑的特性,因此与众多重要的DEM理论问题联系在一起,如DEM的定义、DEM的综合等。
地学界关于高质量DEM或高保真DEM也有不同的描述:
(1)Carrara(1997)高保真观点
Carrara A.等(1997)提出如下DTM质量评定标准,反映了DTM高保真的要求:
(a)原始等高线周围的高程必须等于或约等于等高线高程值(例如,误差应小于5%等高距)。
(b)两等高线带内的高程值必须根据两等高线的高程范围来确定。
(c)高程带内的DTM高程应为两根等高线间高程的线性变化。
(d)具有低地形信息、宽阔的山谷底部或山的平顶特征的区域,其DTM高程模式必须反映合理或现实的地貌形态。
(e)不合理地貌形态(伪地形)的DTM高程分布应控制在整个数据集的一个小比例范围(比如小于0.1%或0.2%)。
在地表逼近问题上,Carrara A.等(1997)认为,虽然自然斜坡中凸型坡和凹型坡比直斜坡常见,但任何坡型都可用一系列等高线对所划分的直斜坡段来逼近,在无额外信息的情况下,这种逼近比凸型坡和凹型坡更为合理。
(2)汤国安等(2005)高质量DEM要求
汤国安等(2005)从DEM逼近地形表面的角度提出了高质量DEM的三个基本要求:
(a)保凸性。设实际地面曲面方程为H=f(x,y),拟合曲面方程为H=F(x,y)。以高程为H0的水平平面切割实际曲面和拟合曲面。所谓的保凸性,就是要求这种切割后得到的两个平面曲线y=f(x)和y =F (x)有相同或接近相同数量的拐点,并且拐点位置一致或接近。
如果两条曲线拐点数目接近但位置相差较远,或位置接近但数目相差较大,就认为保凸性较差。实际上两个平面曲线的拐点数据和位置的基本一致也就意味着两者对应的山脊线和山谷线的走向基本一致。
(b)逼真性。在研究区域内,地面曲面方程为H=f(x,y)和拟合曲面方程为H=F(x,y)对应的点之间满足Max(|f(x,y)- F(x,y)|)≤σ,则认为逼近地面达到逼真性要求。表达式中σ是逼近的容许误差,其大小根据应用要求确定,σ越大,逼真性要求越低,σ越小逼真性要求越高。逼真性在DEM中常常用中误差(RMSE)、标准差(SD)、平均误差(ME)衡量。
(c)光滑性。光滑性指三维曲面或二维曲线的二阶导数的连续性,或者说是曲面或曲线的曲率的连续性。如果实际地面是光滑的,那则逼近曲面也应该是光滑的。
这三个要求相互独立又相互影响,逼真性和保凸性有关,逼真性实际上要求逼近曲面以尽可能高的逼近度(低误差)表达地形表面,保凸性也会影响曲面的整体逼真性;但保凸性往往和光滑性有冲突,一个光滑性很好的逼近曲面可能保凸性较差。
另外,逼近性、保凸性,和光滑性在不同的应用领域会有不同程度的侧重点。如对于比较粗糙破碎的地形,DEM保凸性和逼真性在先而光滑性次之;而在DEM综合的目的是在原有DEM基础上要得到一个保持主要特征的光滑曲面,所以就会要求较高的保凸性,而在逼近性和光滑性方面是折中的。
(3)胡鹏(2007)高保真观点
地面是一个严密的三维有序系统,一个区域三维地面的全部点集由于高程(重力)决定;使用DEM来表达地面,不仅是几个点组成的向量序列,而且必须兼顾这些点的全部关系。
高保真问题是指:人工模型是否保持有实际三维空间或原始三维数据所具有的在其相邻区域内的无冲突的三维特征和高程逻辑(指地形高低起伏的有序结构)?不仅仅是它的精度。高保真要求是对原对象高程序列的维护,与DEM生成中原对象各点高程的误差不是一个概念。
DEM高保真问题是对DEM生成方法和生成机理的严格要求,它不仅要求能够生成满足精度的数字模型,而且要求生成的模型保持所有相关的高程逻辑:保持“三维地面的拓扑性”,和“高处仍高,低处仍低”的特性,而且要保证三维地面概念模型的质特征——地形结构特征。
高保真概念建立在三维地形几何模型之上,其主要思想可以归纳为:
(a)地形表面是复杂的,但是也是确定的。在此模型下,地形表面可以表达为多个单元的简单曲面拼接成的连续曲面,这些简单的地形单元称为“坡面元”。
坡面元及是单值的、单调的函数曲面片,其内部被认为没有明显的坡度变更线。如果曲面面片不满足此特性,则总可以将之分为更小的组成单元,使单元内符合上述特性。
(b)不管是地形图还是DEM都是尺度依赖的,这里所定义的高保真并不都是对地形表面的保真。例如以一定比例尺的地形图为输入数据生成DEM时,是对该尺度地形图所表达的地面模型的保真。因为等高线图形是该等高面上覆三维曲面的同胚像,其间的1-1拓扑映射是针对等高线所表达的三维曲面,而不是地面本身,参见“等高线图形是该等高线平面上覆地貌的同胚像[钟业勋等,2002]”。
(c)高保真是全局的本质特性要求,要使内插生成的DEM保证这个特性,DEM必须经过综合生成。以一定比例尺的地形图作为为输入数据内插生成DEM为例,为确保DEM高保真特性,先应采用与该地形图相同或更高的图解分辨率(如图上0.1mm)为DEM格网大小,生成综合的“基础DEM”,然后再实行多—1变换的综合过程。
(d)地形的高保真特性以地形结构(线)的高保真特性为基础。即要求结构线内插像惟一,所有内插不越过结构线。具体表现为:所有内插不越过等值线或特征高程点进行,所有内插不越过结构线进行。
6.2 三种线性内插方法的高保真特性分析
胡鹏等(2007)在其DEM高保真的概念之下分析并论证了3种线性内插方法的不同的高保真特性。分为主动的、被动的,和不具备三种。现总结如下。
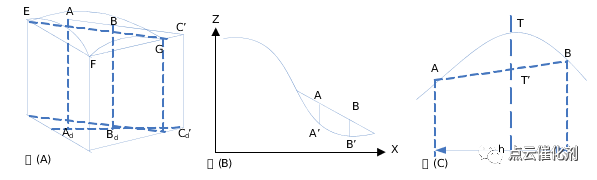
图 1 (A)三角形上线性内插的高保真特性,(B)流水线上线性内插高保真特性,©格网h线性内插的高保真情况
(1)三角形上线性内插高保真特性
由于一个平面区域中可以分解为无缝无叠的三角剖分。如图1(A)中,坡面元内两点A、B在内插的三角形上有内插像点A’、B’。地面点和内插像点保持了“高处仍高,低处仍低”的特性,且在三角形内部和边界上和对应的坡面都具有一一对应且双向连续特性。三角形上线性内插方法的高保真特性可以概括为:
(a)三角网模型能够保持“三维地面的拓扑性”,即地面点在线性内插的三角形上有唯一的像点;
(b)不管是在一个坡面元内,还是在相邻或者不相邻的坡面元内,三角形上线性内插具有“高处仍高,低处仍低”的高保真特性;
(c)三角形上线性内插具有高保真特性的前提是任何三角形内不能有结构线;而保证这一点必须在构建TIN模型之前手工或程序自动补充足够的地形特征点,所以说,这是一种被动的高保真线性内插方法。
(2)线性内插的高保真特性
地面上每一点的流线及整个流线集合体现了全区域上的高程逻辑,它表现为等高线图上过每一点且垂直于等高线的流线投影。每一个线性内插的内插段,均在两相邻的等高线之间,或等高线与高程点之间(高程点可视为浓缩为一点的等高线)。任何一点的线性内插的都在一个内插段中进行。流线上线性内插的高保真特性是:
(a)地面点在线性内插的变换中有唯一的像点;在同一坡面元内能保持“高处仍高,低处仍低”的高保真特性;
(b)若能严格地实施流水线上线性内插,那么这种内插是不会超越任何地形结构线,也就是说此方法具有主动的高保真特性;
(3)双一次拟线性内插的高保真特性
双一次拟线性内插的高保真特性分两种情况,不规则格网和规则格网。
(a)双一次拟线性内插用于不规则四边形格网时,因为不能保证边界上的点在相邻内插单元中像点的唯一性。在全区域中不能保证一一对应且双向连续的“三维地面的拓扑性”,不具备高保真的基础。
(b)规则格网上进行双一次拟线性内插,在全区域中能够保证一一对应且双向连续的拓扑特性,但是在规则格网上线性内插时,难以顾及地形特征。如果在同一个坡面元内内插,高保真特性可以保持,但当四个点跨越结构线时,高保真特性没有保证。此时只能大幅度缩小格网的尺寸,大幅提高已知数据的进度及密度来改善高保真特性。
七、数字环境下地貌数据的特点
6.1 地貌信息的特点
(1)地貌形态的连续性
地貌(landform)即地表起伏形态,在地理学中也叫“地形”,其形成是受地壳运动和构造类型的控制,且与地貌营力、岩性、地下水潜蚀、地貌发育等作用因素也有一定的关系。平原、高原、山脉、山峰、丘陵、河谷、盆地、悬崖,山岭间的塬、梁、峁等,构成了千姿百态的地貌。但是地球表面的地貌却是连续的(即数学上的连续曲面,没有断点)。这也正是用等高线来表达地貌形态的理论基础。
(2)地貌的三维特性
地貌是地理信息中基本的要素之一,是其它地理要素,如土质、植被、水系等自然要素,和道路、境界、居民地等人文要素的自然基础和支撑。可以说其他地物的三维特性是建立在地貌的三维特性基础之上的。
地貌综合必须充分利用这一特性,基于地貌三维特性的综合有了更可靠的信息支持,而基于二维等高线的几何特性的综合方法,如果没有利用三维信息,即便是顾及等高线所隐含的地性线信息,也难以令人满意的综合效果。
尽管在数字环境下,地貌可以以TIN、Grid DEM、散点、曲面等模型进行全三维的存储管理和显示,但是在地图上地貌是以二维的等高线族表达的。这也是地貌综合的难点所在。
(3)地貌的结构化和层次性
地图综合首先意味着对地理信息的全局性评价,即查明与建立地理目标的分布规律与结构关系。在地图中或数字高程模型表达的地貌中,隐含着丰富的空间关系信息,结构线(山脊线、谷底线)起着桥梁和纽带作用,它们是骨架线。结构线之所以重要,是因为评价地形图上的等高线族或DEM表达的地貌特性(重要性)很困难,但是评价其替身——“地性线”要方便容易的多。
在较大的地理区域中,结构线呈现出明显的结构特征和层次特征,通常以(层次)树结构来表达。并可以可用三种不同的途径来实施地貌形态的结构化综合:基于分形学原理的准(隐式) 结构化综合,基于结构线的显式结构化综合和基于地貌高程带的结构化综合(毋河海,1995a)。
在地图综合中,河流、谷地线、山脊线等各种树状结构都可以建立其等级体系。以树状结构的等级体系为依据,有利于在概括过程中保留主流(主谷、主脊),舍去支流(支谷、支脊),从而保持其主干骨架线。河流等分级体系常常采用Horton、Strahler、Scheheidegger、Shreve等编码规则,根据这些要素之间的连接关系, 可以确定河流之间的父子关系,如图 4‑2(A-D)(毋河海,1996);这种结构特性和层次特性还体现在等高线的空间关系之中,为了表达等高线之间的包含、平行等关系,人们常常以一个区域内连续的等高线建立起等高线树,如图 4‑2(E-F)。
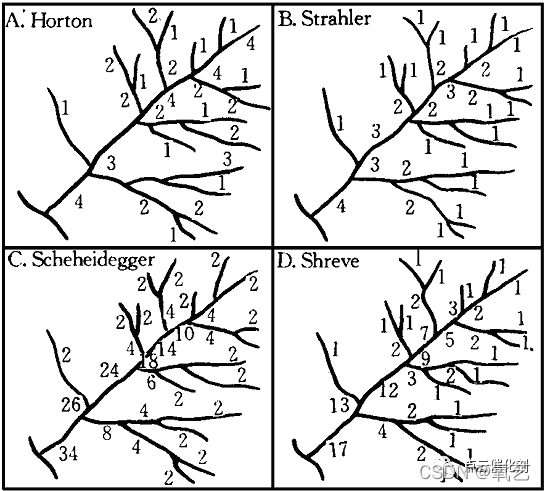
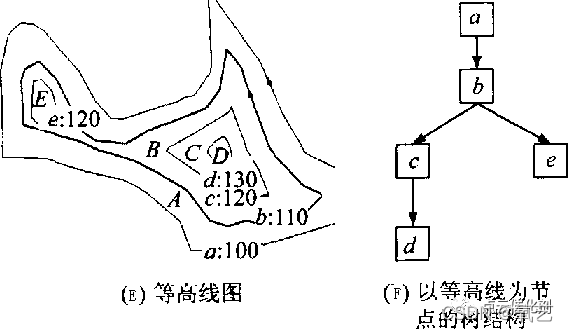
图 4‑2地貌结构化及层次特征,(A-D)河流(谷地线)的分级编码方法,(E-F)等高线的树结构(引自毋河海,1996)
(4)地貌的复杂性
由于地貌形态,地貌营力及其发育过程的复杂性造就了地貌类别的千姿百态。如果仅仅只是考虑地表形态,按我国的陆地地貌习惯上划分为平原、丘陵、山地、高原和盆地五大形态类型。根据外营力,通常划分为流水地貌、湖成地貌、干燥地貌、风成地貌、黄土地貌、喀斯特地貌、冰川地貌、冰缘地貌、海岸地貌、风化与坡地重力地貌等。
外力又包含侵蚀的和堆积的两种类型。但由于地貌形成因素的复杂性,还需考虑内营力、形态及其规模。
地貌信息的复杂性不仅体现在地貌类别的纷繁复杂,而且即使是单一的地貌类别又有着复杂的嵌套、复合关系。这种复合性通过嵌套的等高线弯曲来表达,要求既需要考虑局部地形特性也要顾及领域甚至全局的地形特性。
不管是等高线还是Grid DEM,对于不同类型的地貌的适应性是不一样的;王光霞等(2004)研究了不同的地貌区域的DEM描述误差,得到了不同地貌区域DEM描述误差呈现出不同的规律的结论;大量的研究表明,区域DEM高程精度与区域平均坡度值之间存在强相关(Akman,1979)。
(5)邻近关联性
邻近关联性是自然界的普遍现象。邻近关联性也就空间自相关(spatial autocorrelation),是地理学的第一定律。即空间分布的事物或现象在不同程度上相互联系和制约,而且相近的事物之间的影响通常大于较远的事物的影响。
Griffth(2003)在分析空间自相关与空间格局分布时依据分析空间范围的大小,将空间自相关可分为全局空间自相关(Global Spatial Autocorrelation)和局部空间自相关(Local Spatial Autocorrelation)。
全局空间自相关指研究范围内邻近位置同一属性相关性的综合水平,局部空间自相关指研究范围内各空间位置与各自周围邻近位置的同一属性相关性;依据空间自相关的性质,空间自相关可分为正空间自相关(Positive SpatialAutocorrelation) 、负空间自相关(Negative Spatial Autocorrelation)和无空间自相关。按Griffth的观点,如果一个空间场中的类似的数值有聚集的倾向,则该空间场就表现出正空间自相关;如果类似的属性值在空间上有相互排斥的倾向,则表现为负空间自相关。
地貌是典型的具有很强的正空间自相关的空间现象。地貌临近点的高程值具有“聚集”的倾向,“高处仍高,低处仍低”是地貌自相关性质的体现。这种空间自相性是DEM(内插)生成、地形分析的理论前提,也是所有地貌综合方法的理论基础。
(6)不确定性
不确定性也是自然界的普遍现象,地貌信息的不确定性是指地貌信息的表达存在一定的随机性、不精确性、不可分辨性和模糊性等。地貌信息的不确定性主要体现在:
(a)地貌类别的分类的不确定性,也就是说,按照上述不同的分类体系(地貌形态及其规模,外营力和内营力等因子的组合),就会得到不同的分类结果;
(b)地貌单元边界的模糊性,不能得到一个确定的,精确的地貌单元划分边界。如山顶与背坡、山脊区域(分水区域)和谷地区域(汇水区域)等。
(c)地貌描述手段的不确定性,即等高线表达地貌的不确定性。李占元等(2005)认为等高线是地表一定空间范围内高程相等与不相等的连续线在水平面上的投影。等高线与比例尺密切相关,,当比例尺为1:1时,等高线是名副其实的;当比例尺缩小时,等高线的含义就发生了变化。
等高线上的点的真实高程是不一样的。比例尺越小,与真实值的差异就越大,也充满了不确定性(承继成等,2007)。
(d)地貌信息量化后的各类数据误差,数据获取误差、分析计算误差等。
6.2 数字环境下地貌数据的特点
地貌信息除了上述几个特征以外,在计算机环境下它还具有如下几个特点:
(1)DEM模型表达法的离散性
在地图上表示地表形态是困难的, 因为要在二维平面上表示三维空间形态,而三维信息在地图上并不直接表示。等高线是表示地貌形态的重要手段,具有严密、可量测和易转换的特点。
但是地貌形态是连续的,而作为表示手段的等高线束通常是相当离散的。从几何特性看,等高线在其沿线方向是连续无断点的,但在其垂直方向却是不连续的。特别是当等高距较大或地形比较和缓而使得等高线比较稀疏时,地貌形态表象的不连续性就突出了(毋河海,2006)。
而通过Grid DEM和TIN模型表达的地貌则是通过几何上离散的三维点集,配合点集之间的空间关系表达连续的地球表面。所以,这三种典型模型都是借助模型化的手段,通过几何空间上不连续的数据“刻画”连续的地貌表面。
数字环境下表达地貌数据的不连续性还表现在以离散等高线或Grid DEM表达连续的地形表面时,地貌结构线会具有不完整性(郭庆胜,2002)。
人工识别地貌结构特征具有宏观的完整的结构,且会对微观的局部的地貌特征予以综合考虑。但是这种局部的和全局的地貌特征在计算机中表示时,也会出现不连续性。如与其他谷地线无任何联系的独立谷底线,另一种情况是综合时遇到的平坦地形区域,使得山脊线并不总是连续的。
(2)地形结构信息的隐含性
地形结构信息是结构化综合法的基础和关键,但不管是地图上的等高线,Grid DEM,还是TIN等模型,都没有显示地表达出结构信息。而且地貌的实体信息,如谷地、山体等,也都是在等高线图上也是间接地表达的,在地图数据库中或在GIS空间数据库中所存储的是表示地貌的等高线,GridDEM或TIN等模型数据。
在人工综合中,作业员由等高线群识别地貌实体是一件极为容易的事,而在数字环境下就不同了。因此为了完成以结构化为基础的地貌综合,一个重要的任务从等高线、或Grid DEM、TIN数据中“导出”地形结构信息。一般会经过三个步骤,探测可能的地形特征点,联系特征点组成特征线,和将特征线关联起来构成综合中便于评价地貌特征的层次化的结构。
八、基于等高线图的DEM生成方法
这里的等高线图是指从纸质地形图经过矢量化后得到的DLG,或者是野外测量、摄影测量方法生产的DLG数据,DLG中用于生成DEM的要素类包括等高线、高程点、水系等。
从已有文献分析看出,虽然DEM直接获取方法日益成熟并逐步得到广泛应用,如摄影测量方法(包括航空摄影测量和基于遥感立体影像的摄影测量方法),航空激光扫描(Airborne laser scanning)或LIDAR、干涉雷达(SAR)等。
尽管此类方法的直接获取时间代价非常低,但是目前其设备昂贵,且这些先进的技术方法都也有自身的局限性,例如InSAR用于地形测量或其他监测也有明显的缺点,如对于大气参数的变化、卫星轨道参数的误差和地表覆盖的变化非常敏感(游新兆等,2001;单新建等,2001);Iknos或SPOT等遥感影像的获取受季节和云层覆盖的限制,在数据获取渠道不畅通的情况下,实际获取到某个区域的DEM数据的整体时间有时并不比其他方法短,因而工程实施的整体成本十分高。
因此通过获取地形数据,然后实施内插来获得DEM仍是适用的技术途径。以现有纸质地形图或现有DLG通过空间内插生成DEM的方法仍然是目前最便捷和经济因而也是最主要的技术途径。我国1:25万、1:5万DEM数据库,以及各省自治区已经或正在建立的1:10000DEM数据都是在已有DLG的基础上内插生成的。
MADEM就是针对由等高线图内插生成DEM的技术方法。
关于基于等高线图生成DEM的方法的分类,已经有了多种思路(Watson,1992;李志林等,2003;汤国安等,2005)。最简单的分类方法只分为点方法和线方法。这里沿用李志林等(2003)的分类方法,将基于等高线图生成DEM的方法分为三类:等高线离散化方法,等高线构TIN方法,和等高线内插方法。
8.1 等高线离散化方法(Point-based)
等高线离散化方法也叫做点方法(Point-based),采用离散后的三维点和已有高程点内插形成DEM。这种方法简单易行。点方法可以分为全局内插法和局部内插法(Burrough, 1986),全局方法以整体内插或分块内插实现。
常规内插方法中的多面函数法、最小二乘配置法、有限元法也可用于全局内插法中,但最常见的整体内插法是建立在多项式或样条函数基础上,考虑到地形的变化趋势通常用高次多项式,形式为:
式中有n个待定系数Cij(i,j=1,2,…m),需要从研究区域内取n个参考点来解算n阶线性方程。这种方法不适表达复杂的地貌,且高次多项式函数也极不稳定。而分块内插方法需要把参考空间分成若干块,各块使用不同的内插函数。这时的问题是要保证各分块之间的连续性。一般相邻分块之间要求有一定的重叠度,以保证分块平滑、连续拼接。
全局内插方法由于没有充分利用等高线本身的特性,它能得到一个全局光滑的表面,但生成的DEM与实际情况符合程度较差。且由于它只利用了等高线上的一部分点的信息,且没有充分利用地形结构信息,对于地形变化复杂的地貌,不可能得到精度可靠的DEM。
局部方法就是利用待定格网点最邻近的点或位于待定点的一个指定大小的窗口内的已知点进行内插。TIN方法就是局部内插方法中最具代表性的方法,因为它的独特重要性,这里将之从局部方法中分开来讨论。
逐点内插法是以待插点为中心,定义一个局部函数模拟周围的数据点,数据点的范围随待插点的位置变化而移动,因而又被称为移动曲面法。邻近点线性内插、双线性多项式内插,双二次多项式、双三次多项式内插是最常见的基于局部点的内插函数模型。逐点内插法包括:移动拟合法、加权平均法、Voronoi图法(李志林等,2003)。移动拟合法一般以二次多项式为拟合曲面解算待插点的高程。其关键在于:
(1)如何确定待插点的最小邻域范围以保证有足够的参考点;
(2)如何确定各参考点的权重。
加权平均法是移动拟合法的特例,它使用加权平均代替误差方程。逐点内插法的权重的定义一般采用与距离相关的权函数,如距离倒数、距离平方倒数等。但是距离难以很好地描述空间的相邻性,Voronoi图法则是利用Voronoi工具来确定参考点的权函数。
局部内插方法的共同问题是内插参考点的选取,这不仅影响到内插的精度还关系到内插的速度。其次常规的局部内插算法用于等高线离散化的DEM内插时,均很难顾及地形的特征。
8.2 等高线构TIN方法(Triangulation-based )
等高线构TIN方法原则上属于点方法中的局部内插方法,这种方法就是利用沿等高线上的点产生TIN,再在TIN的基础上进行内插生成格网DEM。因为TIN模型的本身的三维表达的灵活性,且能够适应任何复杂的地形,所以这种方法是一种非常有效的方法。
我国基础地理信息库中1∶25万DEM、1∶5万DEM建库时,均采用了用DLG数据中的等高线、高程点等要素构TIN的方法,然后实施内插生产DEM。但是等高线构TIN方法生成DEM时,有两个关键问题:
(1)要把等高线本身作为构TIN的约束条件,即构建的任何三角形不能跨越等高线。常规的处理是将等高线作为特征线(断裂线)处理,强制不跨过等高线构TIN。例如ArcGIS中将等高线约束成硬断线(hard lines);
(2)基于等高线构TIN不能跨越地形结构线。如果不考虑的话,构建的TIN会受到平三角形的影响,而这些平三角形往往位于主要地貌特征,如山脊线或山谷线的特征点上,导致该部分的插值难于反映实际地面,影像水文分析。解决此问题的方法就是在构TIN之前,人工或自动地补足需要的地形特征信息。
目前在用摄影测量方法得到DLG数据内插生成DEM时,采取的策略是在采集地形信息时,尽量在地形断裂线、山脊线、水涯线、山头、鞍部等特征部位采集足够的离散高程点和由三维点组成的特征线(3D Polyline)。
在自动生成特征点线方面,许多学者对这一问题进行了研究,提出在空间插值过程中导入预先提取的地貌特征信息以改善平三角形问题。
Hugentobler(2004),Hugentobler & Schneider(2005)通过对当前插值方法进行分析,认为等高线中已包含了所有重要的地形特征信息,提出了一种完全基于等高线数据的提取方法。提取隐含在等高线的形状之中的地形结构信息的算法可以大致归为三类:即等高线曲率判别法,等高线垂线追踪法,及等高线骨架线法。
人工插补高程数据也有其适用性。而理论上讲,计算机自动识别地形结构线的问题并没有完全解决。所以这就造成了一个现状,即先由计算机完成从等高线图中插补出大量的特征点,然后由相应的检查工具检查这些点的合理性,并结合人工判别。
我国基础地理信息库建设中,一幅1∶5万的地形图内可插补几万个至十几万个高程点,这些点在加入内插之前,需经过检查工具和人工检查,以确保所添加的特征数据的可靠性和精度。
8.3等高线内插方法(Line-based)
等高线内插方法亦称为线方法(Line-based)。即尽可能利用全部的等高线上的点和离散高程点的高程信息来内插生成DEM。可以分为等高线直接内插法和等高线插密法两类。
(1)等高线直接内插法
其原理是根据待插点与相邻等高线之间的拓扑关系,直接计算其高程。等高线直接内插法也分有两种方式,一种是沿预定轴方向的等高线直接内插,预定轴数可能是1条、2条,或4条。利用这些轴与相邻等高线的交点,借助拟合曲面或距离加权平均法等建模,直接对待定点进行高程插值计算。
另一种方式称为沿内插点最陡坡度方向内插,也被称为断面方法(Profile-based)。这种方法模拟人工方式,选取最陡坡度方向线,取这些射线上的与待定点相邻的等高线上的点作为内插参考点,使用线性内插、或非线性的二次、三次函数方法内插待定点的高程。按Leberl和Olson的做法,在预定轴与相邻等高线的8个交点中确定坡度最大的方向,然后用此方向上的两个点内插待定点的高程。
这种方法利用了地形特征的构造特点,在最陡方向上完成待定高程的内插。但传统的Olson的8方向8点算法和Clarke的8方向16点算法都会在地形复杂情况下错误地识别地形的坡面点和最陡坡度方向。Prima Oky等(2002)分析了这类方法,将其问题归纳为:
(1)8个方向不足以找到完整的最陡方向线,坡面点被误认为山顶点。如图 2‑1(A)(B)。
(2)沿着8方向的某一个直线方向的内插不合理,因为结构线可能是弯曲的。如图 2‑1(C)。
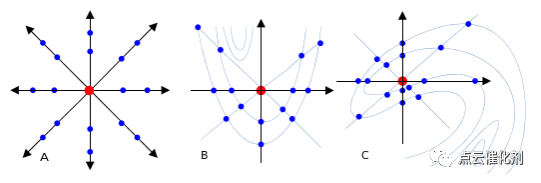
图 2‑1等高线内插,(A)8方向16点,(B)8方向的不足以找到最陡方向,©沿一条直线方向得不到最陡方向
Prima Oky等(2002)将算法扩展为16方向32点,大大规避了这种问题出现的可能性,但从理论上还是有坡面点误判的可能。
(2)等高线插密法
利用等高线之间的空间相互关系,通过等高线插密来生成DEM,Barret 等(1994),Takagi and Shibasaki(1996)最早引入数学形态学应用于栅格等高线的插密。GIS软件ILWIS和GRASS中亦使用了此类算法。
Taud等(1999)在栅格等高线基础上,利用数学形态学的算子,递归地对地图的背景栅格进行交替的4-连通和8-连通侵蚀运算,最后所剩下的骨架栅格就构成了两等高线的中间等高线,利用线性内插原理,中间等高线的高程赋予两相邻等高线的平均值。
进行这种迭代运算直至没有新的中间等高线可以加入;由美国军事建筑工程研究所开发的GRASS (CERL,1996)亦利用了线性内插的原理,但是对待插点实施Flood fill填充,直到遇到两个(高程值)不同的等高线,此点的高程就是两个线性距离的加权平均值;
软件ILWIS (Gorte and Koolhoven, 1990)中,首先计算每一待插点到最近的两个等高线之间的BDM 距离(Borgefors distance measurements ),并存储于两个数组中,然后用这两个距离作线性内插;
冯桂,林宗坚等(2000)在进行数学形态学变换之前,先对地貌进行分类,为不同的地貌类型选择不同的结构元素;刘鹏举,赵仁亮等(2006)则是利用形态学变换得出等高线的骨架线,先计算出骨架线上的栅格点的高程,其它栅格点的高程则利用骨架线高程和形态学变换过程中的扩张次数信息经线性内插得到。
E.Michael等提出依据两等高线间最短连线,取连线中点生成中间等高线,经过多次迭代生成中间等高线,然后对其余点如山顶点或洼地点分别处理。
上述这些算法的共同特点有:
①输入的数据都是栅格等高线图,输出的DEM格网数据与原始数据的分辨率相同。且输入的数据在结果数据中原样保留;
②计算未知点的高程均采用了线性内插;
③共同的限制是等高线不能中断;
④山顶或洼地必须补充高程点,以免山顶被削平,洼地被填平。
基于数学形态学的膨胀法或侵蚀法的实质是在近似欧氏距离变换基础上建立等高线的Voronoi图。但是目前数学形态学在一些重要的理论和实际应用中有如下为题:
①由形态学算子并不能直接地实现精确的欧氏距离计算,要实现精确的欧氏距离计算,需要对结构元素进行复杂的分解,因而大大增加计算工作量;
②进行形态学变换的关键是结构元素的选取,而选择合理的结构元素是复杂和困难的,而且也会涉及到结构元素的分解问题;
③分解与合成规范模型与特征。而且直接通过膨胀实施的欧氏距离变换的误差会随着距离的增大而增大。要使得基于数学形态学的膨胀法的距离变换精度提高,则不得不对结构元进行分解,使问题变得复杂。这种方法的运算效率不能满足大幅面或大数据量的处理。
④这些方法并不能充分地利用离散高程点的高程信息。
本文的DEM生成方法是在栅格化的高程点和等高线的基础上,进行精密的距离变换,并递归计算半距等高线,直至产生足够密集和足够精度的等高线族。大量的数据生产实验表明,这种方法生成的DEM精度可以较好地满足数字高程模型生产的规定。

















 9621
9621

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









