






车道偏离预警系统-LDW,simulink和carsim联合仿真模型
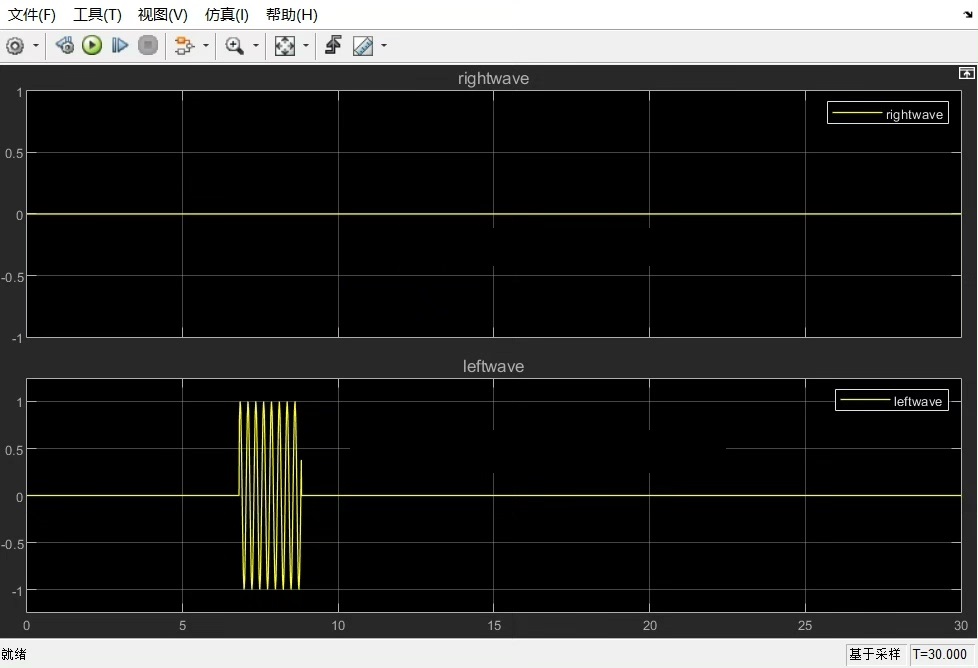
模型中能够准确的实现预警功能,并且报告有驾驶员驾驶风格的判断,利用模糊控制的方法计算不同驾驶风格的驾驶员的预警时间。
其中:
仿真模型+参考文献
加详细讲解视频(视频时长40分钟左右)
ID:1399742774433201
醉里挑灯看客

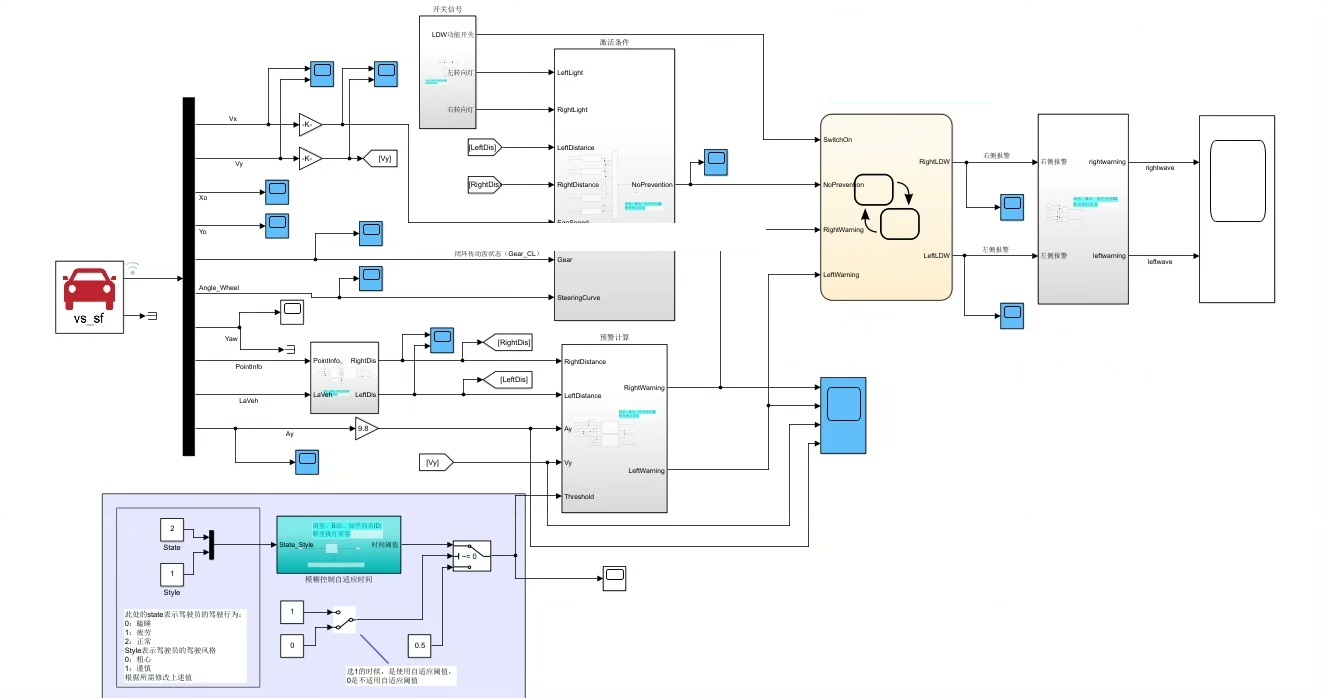
车道偏离预警系统(LDW)是一种广泛应用于汽车行业的安全技术。它可以通过利用车辆传感器和相应的算法来监测驾驶员是否偏离车道,并在必要时提供预警。本文将介绍一个基于Simulink和Carsim的联合仿真模型,用于实现车道偏离预警系统,并进一步分析驾驶员驾驶风格的判断和预警时间计算方法。
在该联合仿真模型中,Simulink被用于建立车道偏离预警系统的算法模型,而Carsim则用于车辆运动学仿真。Simulink可以通过使用不同的传感器数据,如摄像头、雷达和激光扫描仪等,来检测车辆是否偏离车道。通过对这些传感器数据进行处理和分析,Simulink能够实时地判断车辆的行驶状态,并根据预先设定的规则判断是否需要发出预警。
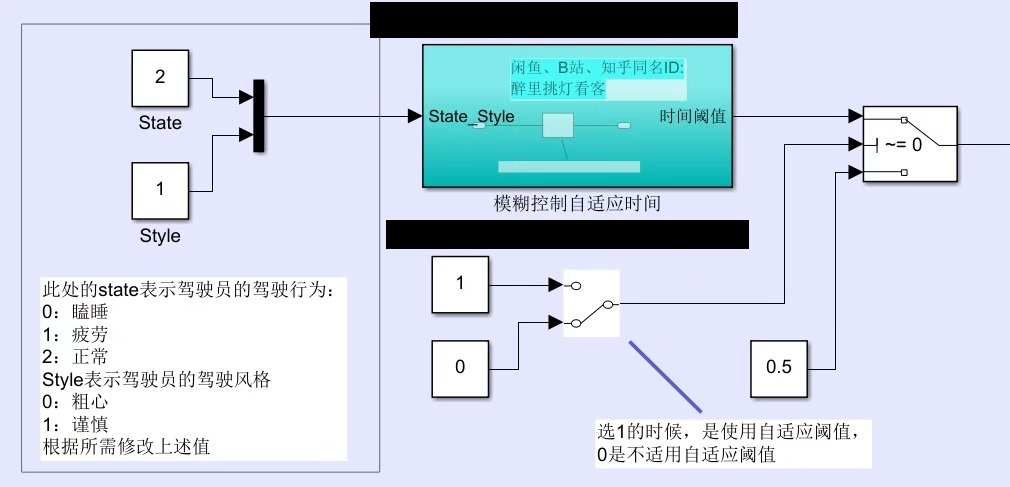
为了准确地判断驾驶员的驾驶风格,我们采用了模糊控制的方法。模糊控制是一种基于模糊逻辑的控制方法,它能够通过模糊集合和模糊规则的定义来描述不确定性和模糊性的问题。在我们的模型中,我们定义了一系列模糊规则,用于计算不同驾驶风格的驾驶员的预警时间。通过对驾驶员的行为和车辆状态进行模糊化处理,我们可以根据模糊规则计算出不同驾驶风格的驾驶员的预警时间,并将其用于车道偏离预警系统中。
在仿真模型中,我们还引入了参考文献进行支持。这些参考文献包含了大量的相关研究和实验结果,可以为我们的模型提供理论依据和实验数据。通过引用这些参考文献,我们可以更加全面地分析和评估我们的模型,并得出有关驾驶风格判断和预警时间计算的结论。
为了更直观地展示我们的模型和方法,我们还制作了详细讲解视频。视频的时长约为40分钟,可以详细地介绍我们的模型和算法,并演示模型的运行过程。通过观看这个视频,读者可以更加清晰地了解我们的模型,并对其中的细节和流程有一个全面的了解。
总结来说,我们提出了一个基于Simulink和Carsim的联合仿真模型,用于实现车道偏离预警系统,并进一步分析驾驶员驾驶风格的判断和预警时间计算方法。通过引入模糊控制的方法和参考文献的支持,我们的模型可以准确地判断驾驶风格并计算驾驶员的预警时间。同时,我们还制作了详细讲解视频,以便读者更好地理解我们的模型和方法。希望本文能够对相关领域的研究和实践有所启发,并提供有价值的参考。
算法模型+传感器数据处理+模糊控制+参考文献支持+详细讲解视频,这些都是我们的模型的核心要素。通过这些要素的结合,我们可以实现一个准确、可靠的车道偏离预警系统,并对驾驶员的驾驶风格进行判断和预警时间计算。希望本文的内容和结构能够满足读者的需求,为他们提供有关车道偏离预警系统的深入分析和研究。
【相关代码,程序地址】:http://fansik.cn/742774433201.html
















 456
456











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









