







 超级会员免费看
超级会员免费看
 本文全面回顾了深度学习在单目物体姿态检测和跟踪领域的最新进展,重点关注实例级和类别级任务,涵盖了基于RGB和RGBD数据的方法。通过对各种方法的分类和性能分析,探讨了当前挑战与未来研究方向,如遮挡处理、鲁棒性增强和轻量化网络设计等。
本文全面回顾了深度学习在单目物体姿态检测和跟踪领域的最新进展,重点关注实例级和类别级任务,涵盖了基于RGB和RGBD数据的方法。通过对各种方法的分类和性能分析,探讨了当前挑战与未来研究方向,如遮挡处理、鲁棒性增强和轻量化网络设计等。
原文:Deep Learning on Monocular Object Pose Detection and Tracking: A Comprehensive Overview
作者:中国人民大学、清华大学、北京交通大学
摘要
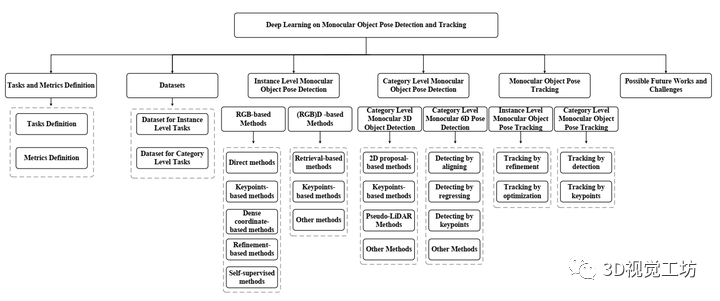
目标姿态检测与跟踪在自动驾驶、机器人技术、增强现实等领域有着广泛的应用,近年来受到越来越多的关注。在目标姿态检测和跟踪的方法中,深度学习是最有前途的一种,其性能优于其他方法。然而,对于基于深度学习方法的最新发展却缺乏调查研究。因此,本文对深度学习技术路线中目标姿态检测与跟踪的最新进展进行了综述。为了更深入的介绍,本文的研究范围仅限于以单目RGB/RGBD数据为输入的方法,包括实例级单目目标姿态检测、类别级单目目标姿态检测和单目目标姿态跟踪三类主要任务。论文详细介绍了检测和跟踪的度量、数据集和方法。文中还介绍了几种公开数据集上的最新方法的比较结果,以及有见地的观察结果和启发性的未来研究方向。
数据集介绍
实例级单目目标姿态估计与跟踪数据集:主要包括经典的Linemod、YCB等数据集~
类别级单目目标姿态估计与跟踪

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 211
211

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











