






本周我们将会有场直播,感兴趣的小伙伴可以预约下,第一时间收到开播提醒
作者:Alone
来源:https://www.zhihu.com/question/421244841
编辑:3D视觉工坊
一、各传感器的优劣势
1.激光雷达:
优点:一般情况下精度准确、360度的感知范围、3维数据(相对于相机具有深度信息)
缺点:成本高昂、数据量大、无序且稀疏(对于单个物体而言,其数据点更少,类似于一张具有深度信息低分辨率的广角照片)
2.相机
优点:纹理细节丰富、成本低廉
缺点:易受光照影响、没有深度信息
3.毫米波雷达:
优点:在特殊场景下(雨雾天气)相对Lidar抗干扰能力强;基于多普勒效应的探测原理能捕捉到一定运动信息;长波长(毫米波)能够检测到一些corner场景下的目标
缺点:精度较低(以点云表达后,数据稀疏且高度信息费城不准;对相对静止的物体检测效果差,并非所有静止物体
4.红外相机:夜视场景,是优点也是局限
二、解决方案
没有详细调研过各企业最终落地的传感器配置方案,但看过不少waymo、百度、nvidia多传感器融合的研究,所以更多地从理论和技术角度分析一下各种解决方案。
1.激光雷达+相机
当前主流的多传感器融合方案,采用相机和激光雷达相互的方式进行3D检测。
将图像数据和点云统一坐标系后,结合图像提供的丰富的物体纹理信息和点云提供的几何结构信息有助于分类任务;点云提供的精确3维信息以及物体在物理世界自然分离的特点有助于改善图像中目标相互重叠的情况,从而更精准地进行目标检测。
一些经典的方法比如MV3D、Frustum Pointnet以及同作者出的ImVotenet等,随便一篇融合的论文的related work都会有较详的综述,在这就不多重复了。目前对于此类融合的算法研究较多,理论研究短期内很难有较大创新,但在工程实践中两种传感器相互辅助的方式可以更加多样化,且必须在考虑算力的前提下,结合不同的场景自适应地调整对不同数据源及特征置信度可能才能真正发挥激光雷达和相机融合的作用。
2.毫米波雷达+相机
若采用点云形式表达毫米波数据,那其实和Lidar和RGB融合原理相差不大,但效果会更差。
另外,毫米波雷达还有range-doppler-azimuth(就是极坐标系下距离、角度以及多普勒特征)数据形式,经过一些数据处理后其实和image张量形式相差不大,因此可以采用传统CNN方法进行融合提取。
关于毫米波雷达的多普勒特征可以算一个小的研究课题,有研究表明,多普勒效应能够捕捉到物体内部组件的振动特征,且毫米波雷达检测到的目标速度信息也是基于此原理。但自动驾驶对此研究并不多,工业应用就更少了。个人认为微多普勒特征的应用虽有理论支持,但在自动驾驶复杂场景以及对安全的高要求下,其性能表现并不稳定和鲁棒,因此没有得到广泛应用。另外,在4D radar实现技术突破能够量产以后,这种特别的特征在自动驾驶场景也许只是锦上添花。
这篇研究[1]则采用这种新的表征形式来融合radar和image的特征,结合模仿学习的理念进行radar检测。
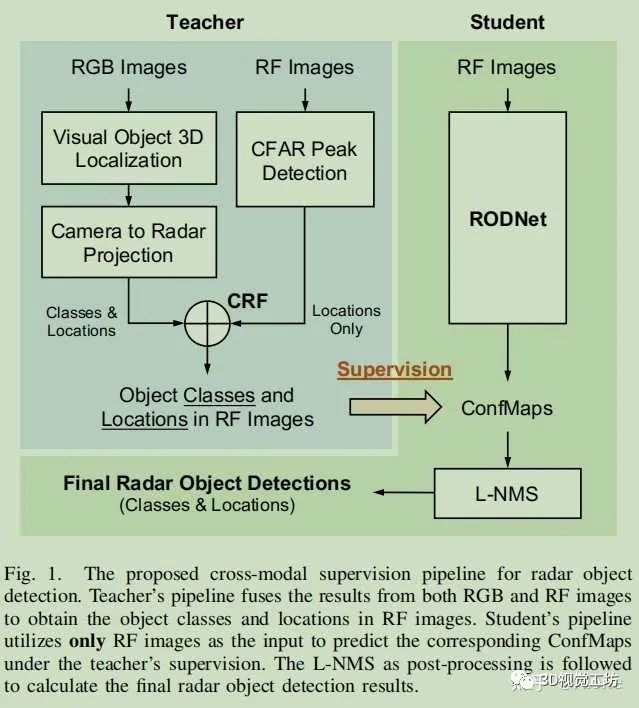
图1
3.毫米波雷达+激光雷达
这篇研究[2]是2020CVPR的一篇文章,研究指出:在雾天场景下,Lidar点云会受到很大干扰,增加很多噪点;而radar的生成的点云虽然稀疏,但几乎不受雾的干扰,因此采用此融合方式可以改善在雾天场景下的3D检测表现。图2为该研究主要框架。
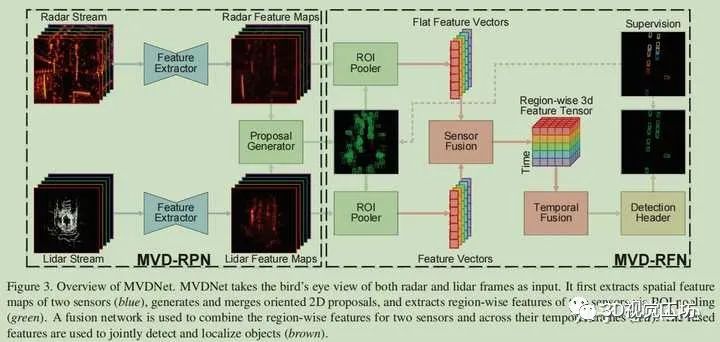
图2
4.RGB相机+红外相机:
主要用于夜视场景的检测
由于应用场景有限,目前更多的是用于学术界的理论研究。但如果真的要实现全天候的自动驾驶,可能终究跨不过类似夜视的长尾场景,只是目前还没发展到那个阶段而已。
总结来看
针对工业界目前近几年L3+的目标,除特斯拉能依靠大规模真实驾驶数据来实现纯视觉的自动驾驶方案以外,其他造车新势力无不加持了激光雷达,同时结合多摄像头实现感知功能。radar和超声传感器等基本已是现代汽车的标配,只是如何使用的问题。
单说传感器的配置方案,可能激光雷达+相机将会是主流(除特斯拉)。
但更加具体和成熟的解决方案必须结合自动驾驶的基础系统来实现,并基于一定的机制来自适应调整从而灵活应用各传感器的数据特征,明确:
一般场景采用什么方式节省算力?
不同场景更加信任哪种数据?
特殊场景如何安全兜底?
等问题的处理机制,在大多数场景下能够表现稳定,才能真正胜出!
参考
1、RODNet: A Real-Time Radar Object Detection Network Cross-Supervised by Camera-Radar Fused Object 3D Localization
2、Robust Multimodal Vehicle Detection in Foggy WeatherUsing Complementary Lidar and (Radar)
—END—高效学习3D视觉三部曲
第一步 加入行业交流群,保持技术的先进性
目前工坊已经建立了3D视觉方向多个社群,包括SLAM、工业3D视觉、自动驾驶方向,细分群包括:[工业方向]三维点云、结构光、机械臂、缺陷检测、三维测量、TOF、相机标定、综合群;[SLAM方向]多传感器融合、ORB-SLAM、激光SLAM、机器人导航、RTK|GPS|UWB等传感器交流群、SLAM综合讨论群;[自动驾驶方向]深度估计、Transformer、毫米波|激光雷达|视觉摄像头传感器讨论群、多传感器标定、自动驾驶综合群等。[三维重建方向]NeRF、colmap、OpenMVS等。除了这些,还有求职、硬件选型、视觉产品落地等交流群。大家可以添加小助理微信: dddvisiona,备注:加群+方向+学校|公司, 小助理会拉你入群。
第二步 加入知识星球,问题及时得到解答
针对3D视觉领域的视频课程(三维重建、三维点云、结构光、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、源码分享、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答等进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业、项目对接为一体的铁杆粉丝聚集区,6000+星球成员为创造更好的AI世界共同进步,知识星球入口:「3D视觉从入门到精通」
学习3D视觉核心技术,扫描查看,3天内无条件退款
第三步 系统学习3D视觉,对模块知识体系,深刻理解并运行
如果大家对3D视觉某一个细分方向想系统学习[从理论、代码到实战],推荐3D视觉精品课程学习网址:www.3dcver.com
基础课程:
[1]面向三维视觉算法的C++重要模块精讲:从零基础入门到进阶
工业3D视觉方向课程:
[1](第二期)从零搭建一套结构光3D重建系统[理论+源码+实践]
SLAM方向课程:
[1]深度剖析面向机器人领域的3D激光SLAM技术原理、代码与实战
[1]彻底剖析激光-视觉-IMU-GPS融合SLAM算法:理论推导、代码讲解和实战
[2](第二期)彻底搞懂基于LOAM框架的3D激光SLAM:源码剖析到算法优化
[3]彻底搞懂视觉-惯性SLAM:VINS-Fusion原理精讲与源码剖析
[4]彻底剖析室内、室外激光SLAM关键算法和实战(cartographer+LOAM+LIO-SAM)
视觉三维重建
[1]彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进)
自动驾驶方向课程:
[1] 深度剖析面向自动驾驶领域的车载传感器空间同步(标定)
[2]面向自动驾驶领域目标检测中的视觉Transformer

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









