






来源:3D视觉工坊
在公众号「3D视觉工坊」后台,回复「原论文」可获取论文pdf链接
添加微信:dddvision,备注:自动驾驶,拉你入群。文末附行业细分群

1. 写在前面
发自动驾驶论文哪少的了数据集,今天笔者将为大家推荐一篇最新的综述,总结了200多个自动驾驶领域的数据集,大家堆工作量的时候也可以找一些小众的数据集刷榜~
下面一起来阅读一下这项工作
2. 摘要
近年来,随着硬件和深度学习方法的发展,自动驾驶技术得到了快速发展,并表现出良好的性能。高质量的数据集是开发可靠的自动驾驶算法的基础。以前的数据集调查试图审查数据集,但要么集中在有限的数量上,要么缺乏对数据集特征的详细调查。为此,我们从多个角度对超过200个自动驾驶数据集进行了详尽的研究,包括传感器模态、数据大小、任务和上下文条件。我们引入了一个新的度量来评估每个数据集的影响,这也可以作为建立新数据集的指南。我们进一步分析了数据集的标注过程和标注质量。此外,我们对几个重要数据集的数据分布进行了深入分析。最后,讨论了未来自动驾驶数据集的发展趋势。
3. 和其他综述的对比
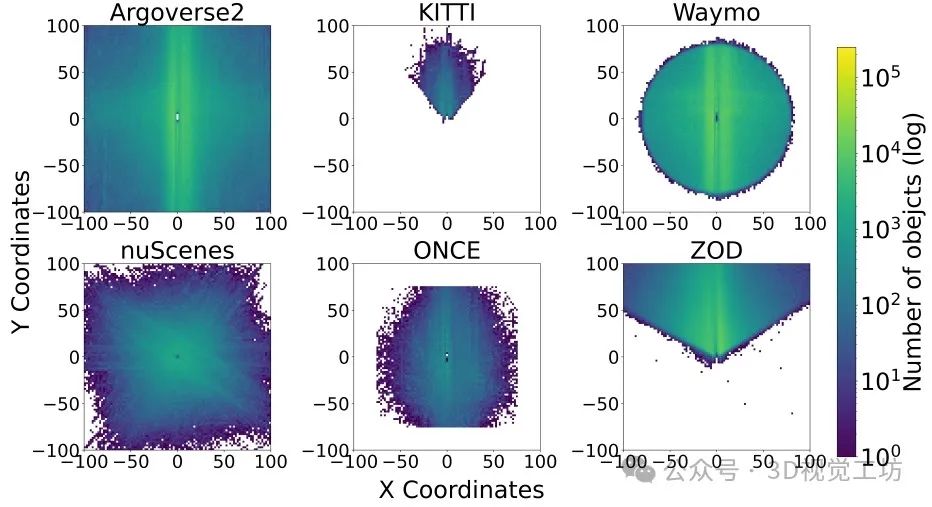
先看一下主流数据集的BEV对象分布。每个热力图对应一个以X和Y坐标绘制的数据集,Y是自车的行驶方向。每个数据集特有的标注特征体现在边界框的分布范围、密度和数量上。
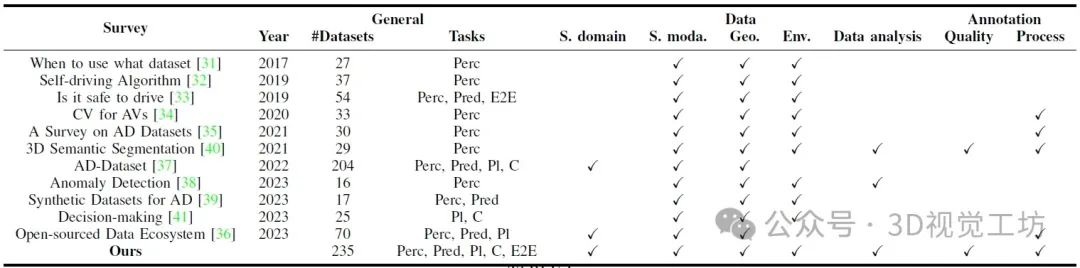
和其他数据集综述的对比:包括收集的数据集数量(Dataset )、相关任务(Tasks)、传感域( S.domain )、传感器模态( S.Moda . )、几何条件( Geo . )、环境条件( Env . )、数据分布(Data Analysis)、标注质量和过程。任务类型用粗粒度来描述,包括感知( Perc . )、预测( Pred . )、规划( PL . )、控制( C . )、端到端 ( E2E )。
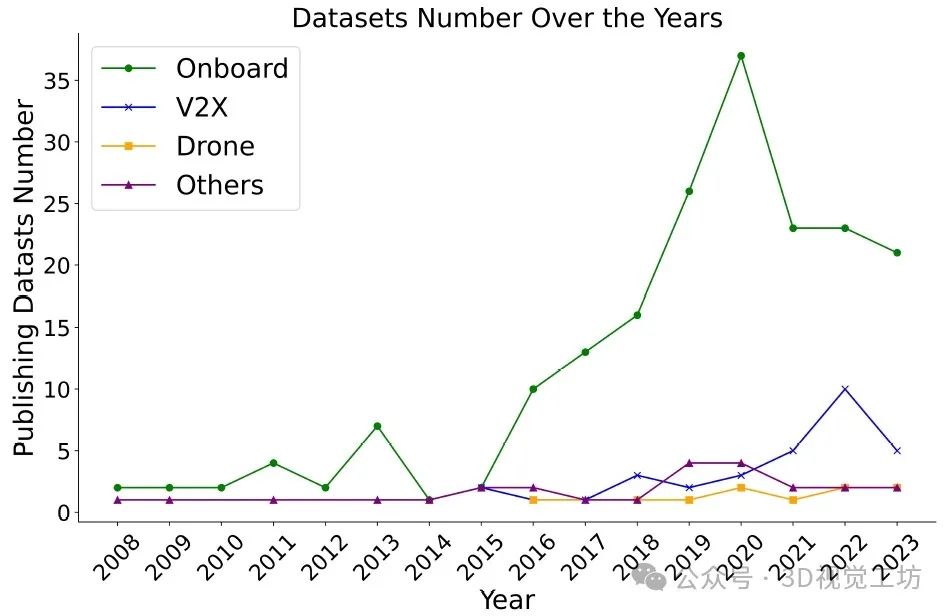
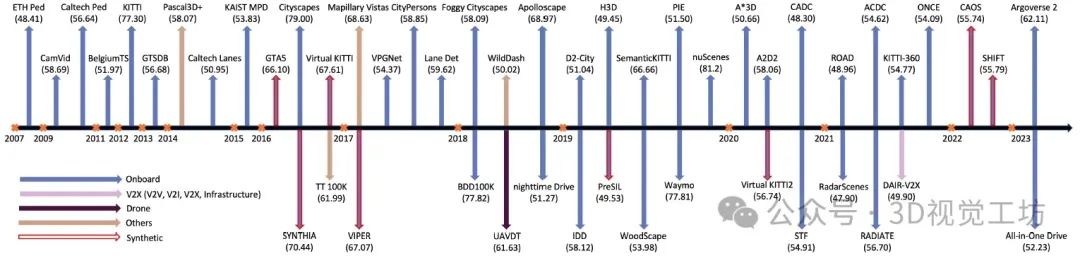
总结了自动驾驶数据集发布的趋势。自动驾驶数据集在2015年至2020快速增长,然后缓慢下降。相比之下,V2X数据集有增加的趋势,显示了协作感知系统的研究趋势。
4. 文章结构
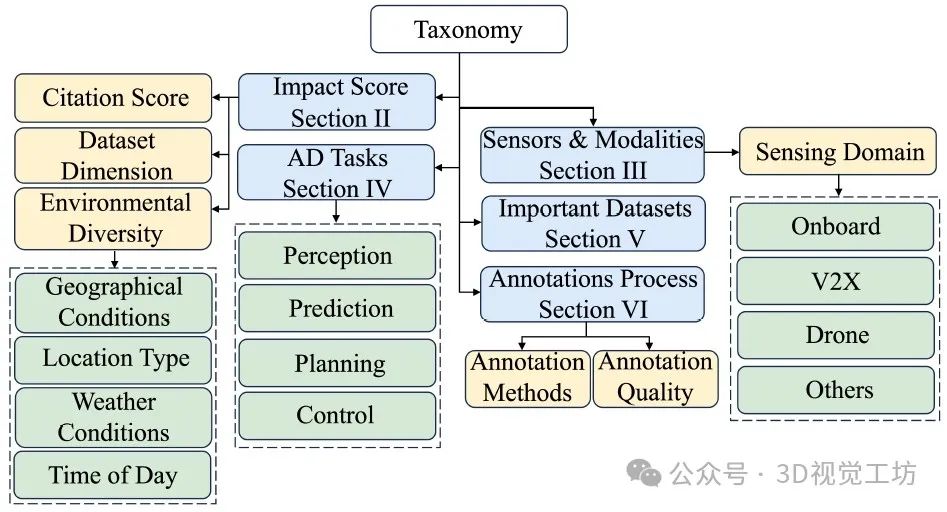
这篇综述主要分类包括影响评分、传感器和模态、自动驾驶任务、重要数据集和标注过程。
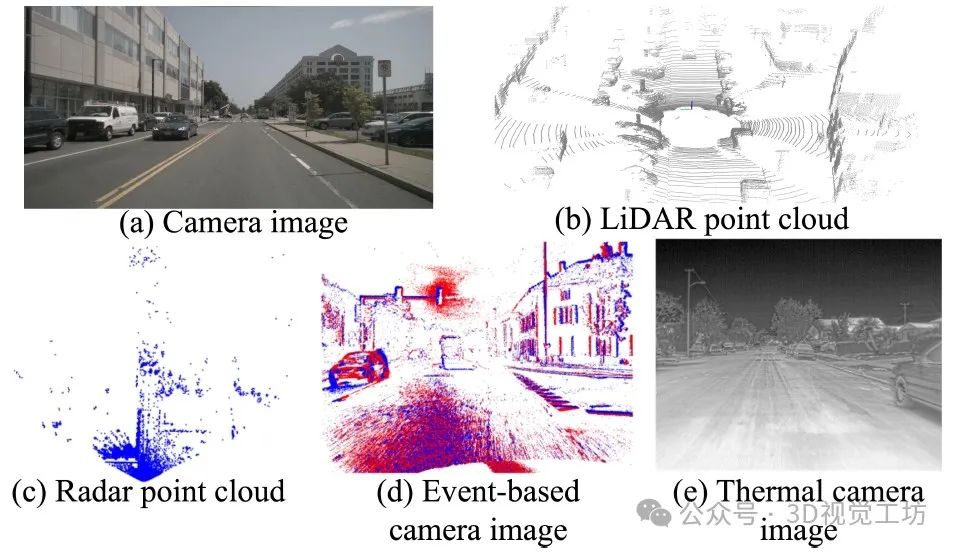
自动驾驶任务中使用传感器的模态总结。
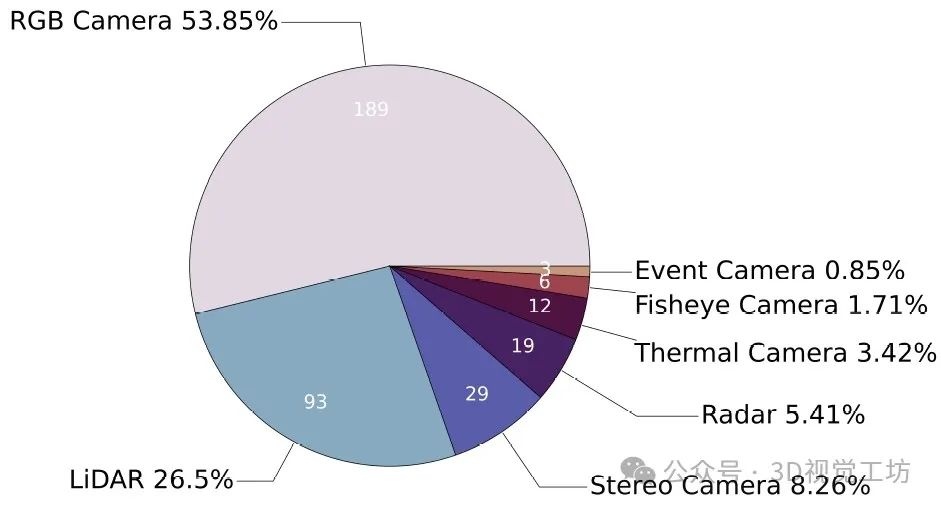
传感器数量分布,RGB相机和激光雷达是自动驾驶数据集中使用最多的传感器。
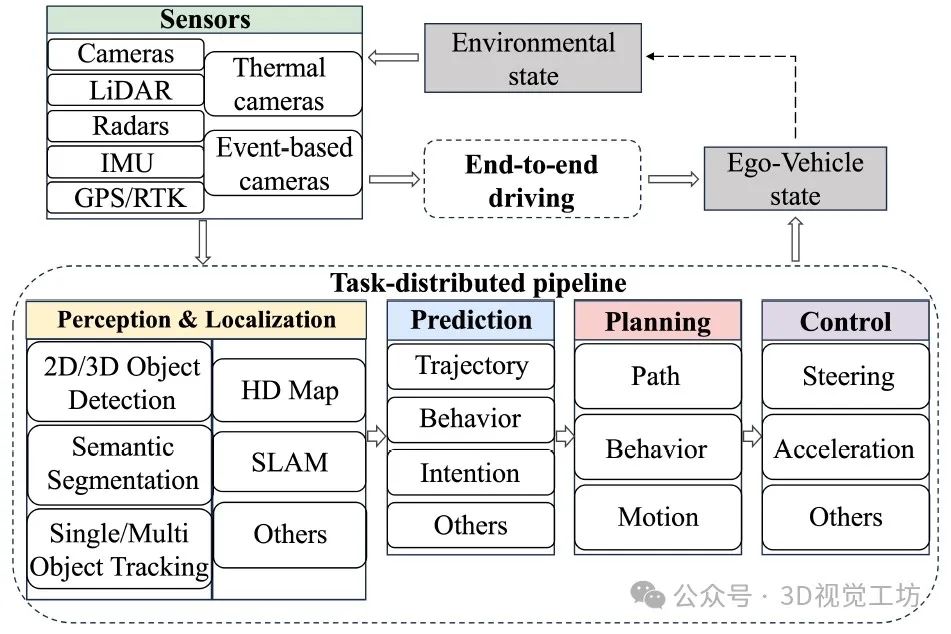
自动驾驶pipeline总结:自动驾驶系统可以分为两种类型:基于模块的和端到端的。
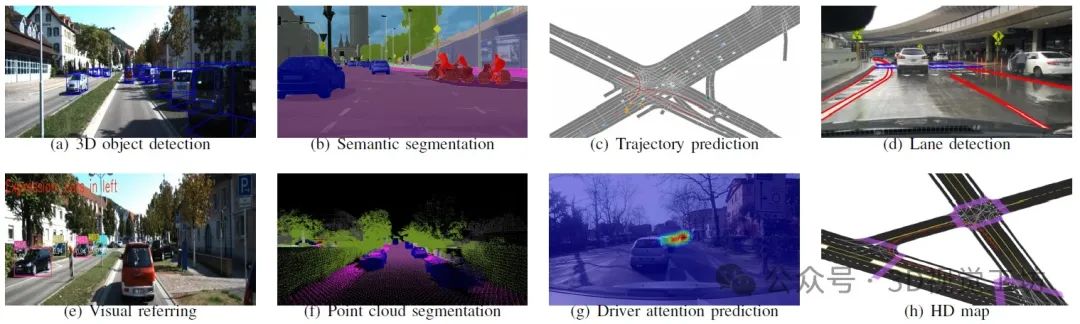
自动驾驶任务的总结。
2007年到2023年的数据集发布的时间线。
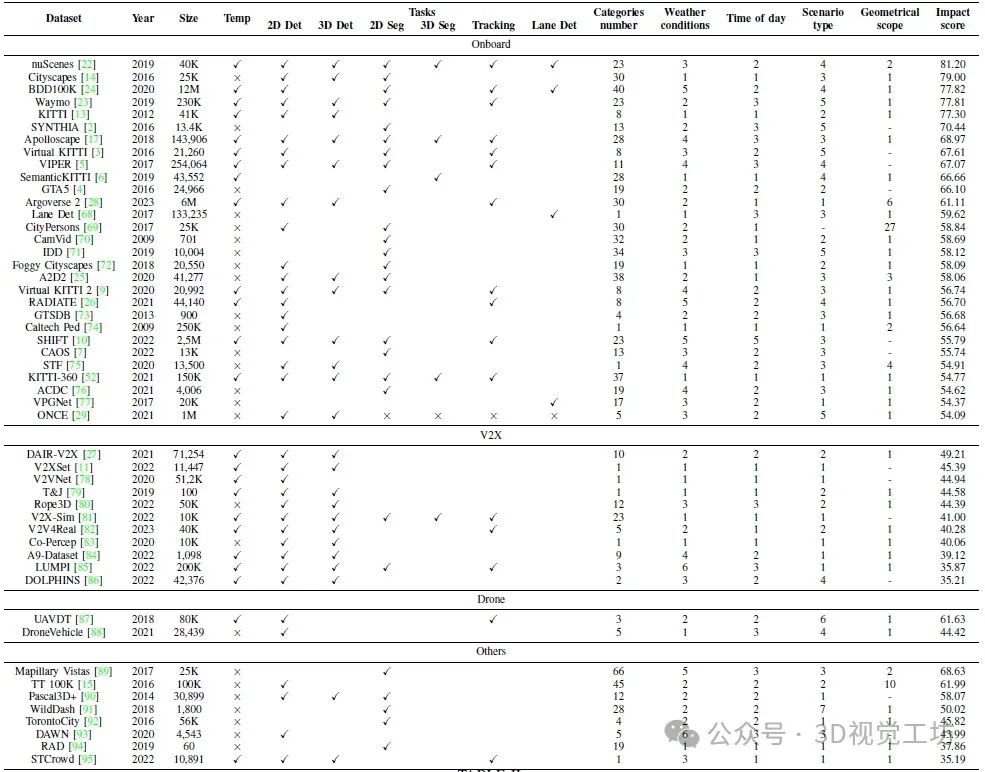
高影响感知数据集的总结。
5. 总结
这篇文章对200多个现有的自动驾驶数据集进行了全面系统的回顾和分析。从与自动驾驶数据集相关的传感器类型和模态、感知域和任务入手。为了验证感知数据集的影响力和重要性,引入了一个新的评价指标- -影响评分。之后展示了几个涉及感知、预测、规划、控制和端到端自动驾驶的高影响力数据集。还对自动驾驶数据集的标注方法进行了说明,并对影响标注质量的因素进行了研究。
对更多实验结果和文章细节感兴趣的读者,可以阅读一下论文原文~
下载
在公众号「3D视觉工坊」后台,回复「 3dcv」,即可获取工业3D视觉、SLAM、自动驾驶、三维重建、事件相机、无人机等近千余篇最新顶会论文;巴塞罗那自治大学和慕尼黑工业大学3D视觉和视觉导航精品课件;相机标定、结构光、三维重建、SLAM,深度估计、模型部署、3D目标检测等学习资料。
3D视觉方向交流群成立啦
目前工坊已经建立了3D视觉方向多个社群,包括SLAM、工业3D视觉、自动驾驶、三维重建、无人机方向,细分群包括:
[工业3D视觉]相机标定、立体匹配、三维点云、结构光、机械臂抓取、缺陷检测、6D位姿估计、相位偏折术、Halcon、摄影测量、阵列相机、光度立体视觉等。
[SLAM]视觉SLAM、激光SLAM、语义SLAM、滤波算法、多传感器融合、多传感器标定、动态SLAM、MOT SLAM、NeRF SLAM、机器人导航等。
[自动驾驶]深度估计、Transformer、毫米波|激光雷达|视觉摄像头传感器、多传感器标定、多传感器融合、自动驾驶综合群等、3D目标检测、路径规划、轨迹预测、3D点云分割、模型部署、车道线检测、Occupancy、目标跟踪等。
[三维重建]NeRF、多视图几何、OpenMVS、MVSNet、colmap、纹理贴图等
[无人机]四旋翼建模、无人机飞控等
除了这些,还有求职、硬件选型、视觉产品落地、最新论文、3D视觉最新产品、3D视觉行业新闻等交流群
大家可以添加小助理微信:dddvisiona,备注:加群+方向+学校|公司, 小助理会拉你入群。



















 450
450











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









