






话不多说,感谢大家一路以来的陪伴与支持,这里赠送大家一张66元星球优惠券(限时三天内使用)。

「导师对3D视觉不是很懂,得不到指导,有项目进来,但是不知道怎么去做?技术栈完全没概念。博主,我应该怎么学起来?身边只有我一个人在做这个方向」
「请问对于深度学习在3D方向的学习,有什么值得推荐的学习路线吗?尤其是深度学习在点云方面的应用、3D目标检测等?」
「博主,您好,请问对于SLAM中的ORB特征提取、回环检测等内容,可以给我们科普下吗?多传感器融合的方式有哪些?有参考资料吗?」
「近年来,3D视觉领域的发展情况怎么样?哪方面比较有研究价值?」
在公众号的后台,经常会收到粉丝们的诸如此类的留言,每次看到后仿佛看到了当初我入门3D视觉时候的样子,很是感同身受,非常希望能用我自身的一些资源或者走过的经验帮助他们一下。
在此,我特别地向大家推荐我们公众号的合伙人以及嘉宾们一起组织运营的知识星球,希望能让大家在学习计算机视觉的路上少走一些弯路。
什么是知识星球?
知识星球是一个高度活跃的社区平台,在这里你可以和相同研究方向的小伙伴一起探讨科研工作难题、交流最新领域进展、分享最新顶会论文&代码资料、分享视频(讲解某一块知识点)、发布高质量的求职就业信息,承接项目等,当然还可以侃侃而谈,吐槽学习工作生活。
「3D视觉从入门到精通」知识星球
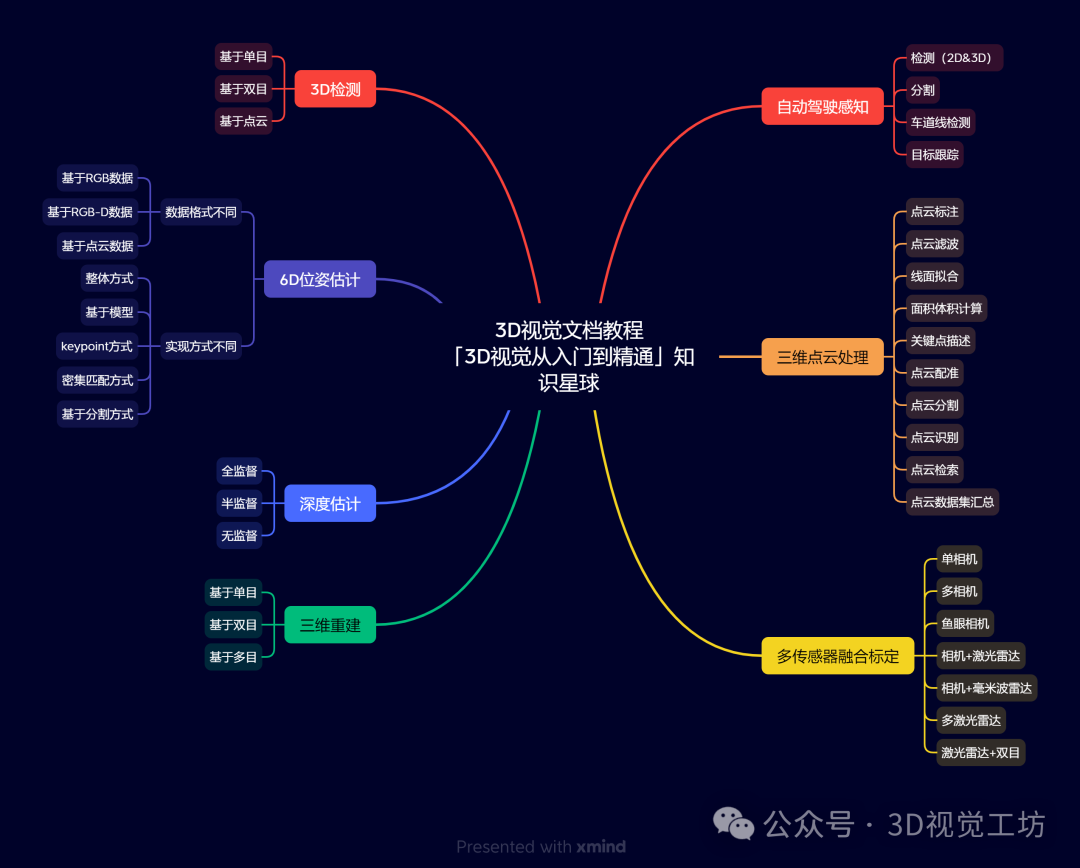
「3D视觉从入门到精通」知识星球是国内超一流的3D视觉学习交流社区,目前已有近5500多名活跃成员,主要涉及这五大方向:工业3D视觉、SLAM、自动驾驶、三维重建、和无人机方向。细分方向众多,包括:相机标定、结构光、三维重建、三维点云、缺陷检测、机械臂抓取、激光/视觉/多模态SLAM、深度估计、模型部署、3D目标检测、深度学习、视觉竞赛、硬件选型、视觉产品落地经验分享、学术&求职交流等。
星球内部汇集了众多实战问题,相信一定能帮你少走很多弯路,以及各个模块的学习资料:论文、书籍、源码、视频(近20门系统课程)等
针对小白,星球推出了学习路线,能够帮助新手快速入门3D视觉。我们的vip微信群(目前已有6个450人以上微信社群)更是营造了良好的学术交流环境。
针对需要进阶的童鞋,星球汇总了大量的前沿技术资源,相信这些内容一定能够帮助到个人的成长发展。

星球成员组成
星球汇集了国内外各个高校的研究生、博士生,包括但不限于清华大学、上海交通大学、华中科技大学、中国科技大学、武汉大学、南京大学、北京理工大学、北京航空航天大学、香港科技大学、香港理工大学等;以及国外留学的小伙伴,主要就读于南加州大学、墨尔本大学、慕尼黑工业大学、亚琛工业大学、京都大学、苏黎世联邦理工、密歇根大学等。除此之外,还有很多一线工作的算法工程师、开发人员,包括但不限于百度、旷视、华为、奥比中光、先临三维、跨维智能等。
知识星球嘉宾
3D视觉从入门到精通知识星球是一个技术社区,在这里你可以讨论任何3D视觉相关的难题、前沿技术。星球邀请了国内外高校博士、CV独角兽公司CTO/CEO、以及各大厂的算法工程师解惑。在这里,你可以一对一和大佬交流,提出自己在工作学习上的疑问。
合作企业
知识星球现已和众多公司建立了良好的合作关系,公司内的算法负责人会不定期的来内部进行前沿技术/产品分享,除此之外,星球也为公司推荐合格的算法/开发人才。现有合作企业包括但不限于:先临三维、跨维智能、奥比中光、视比特科技、百度、阿里等~
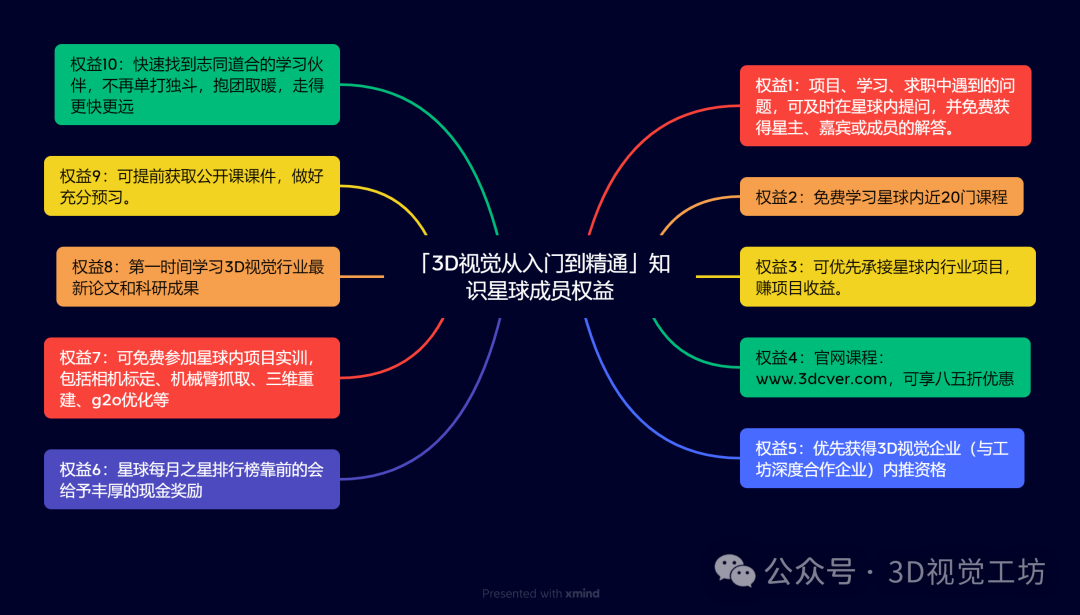
星球成员十大权益
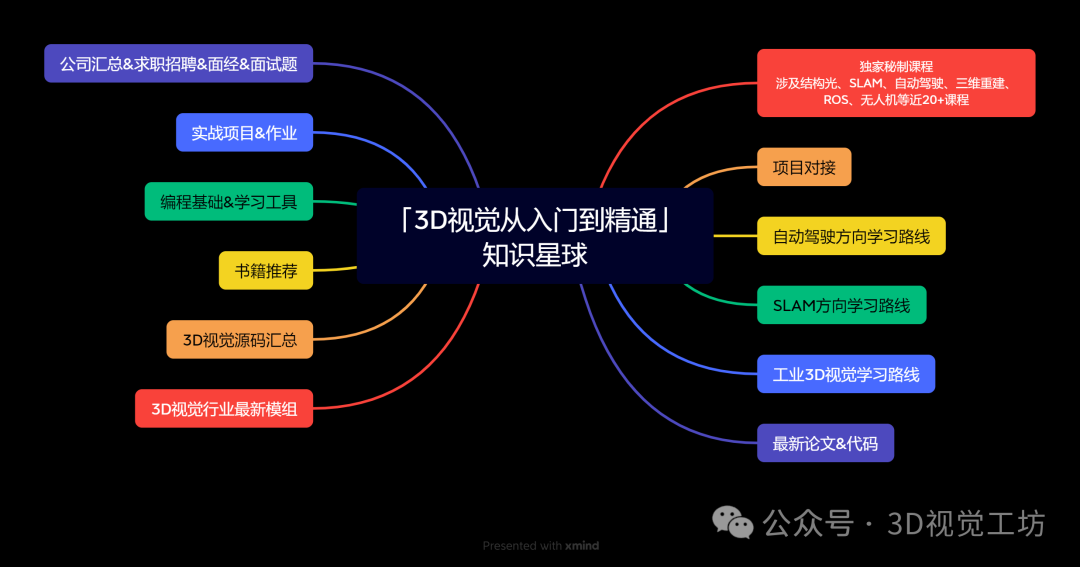
星球内主要内容
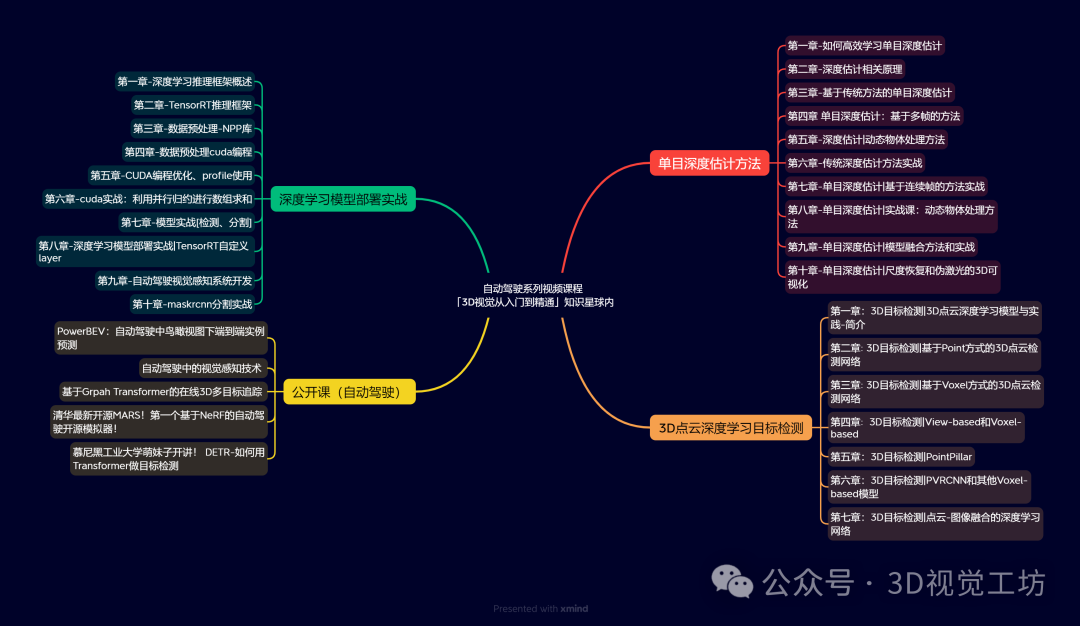
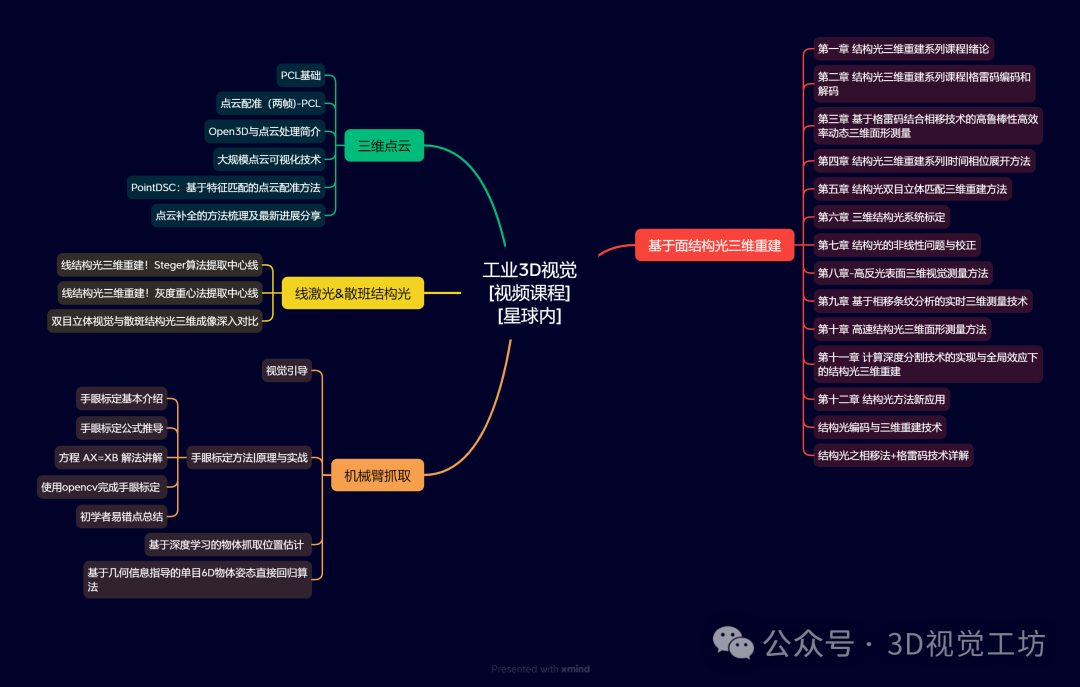
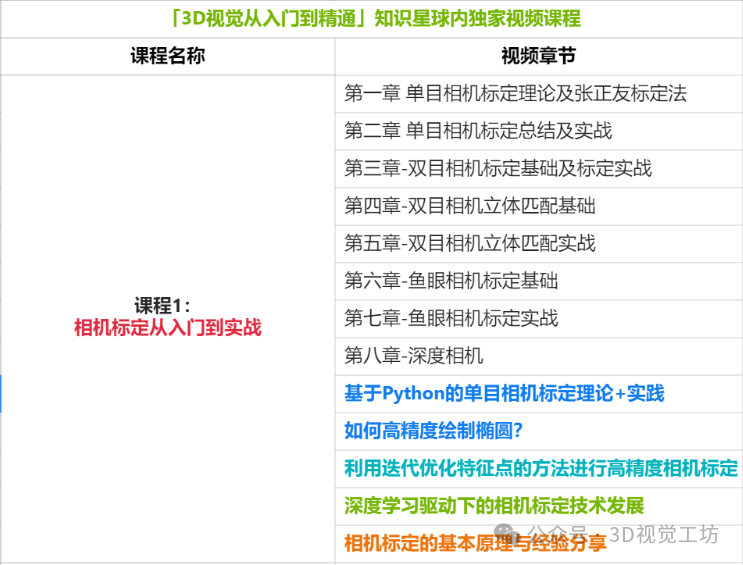
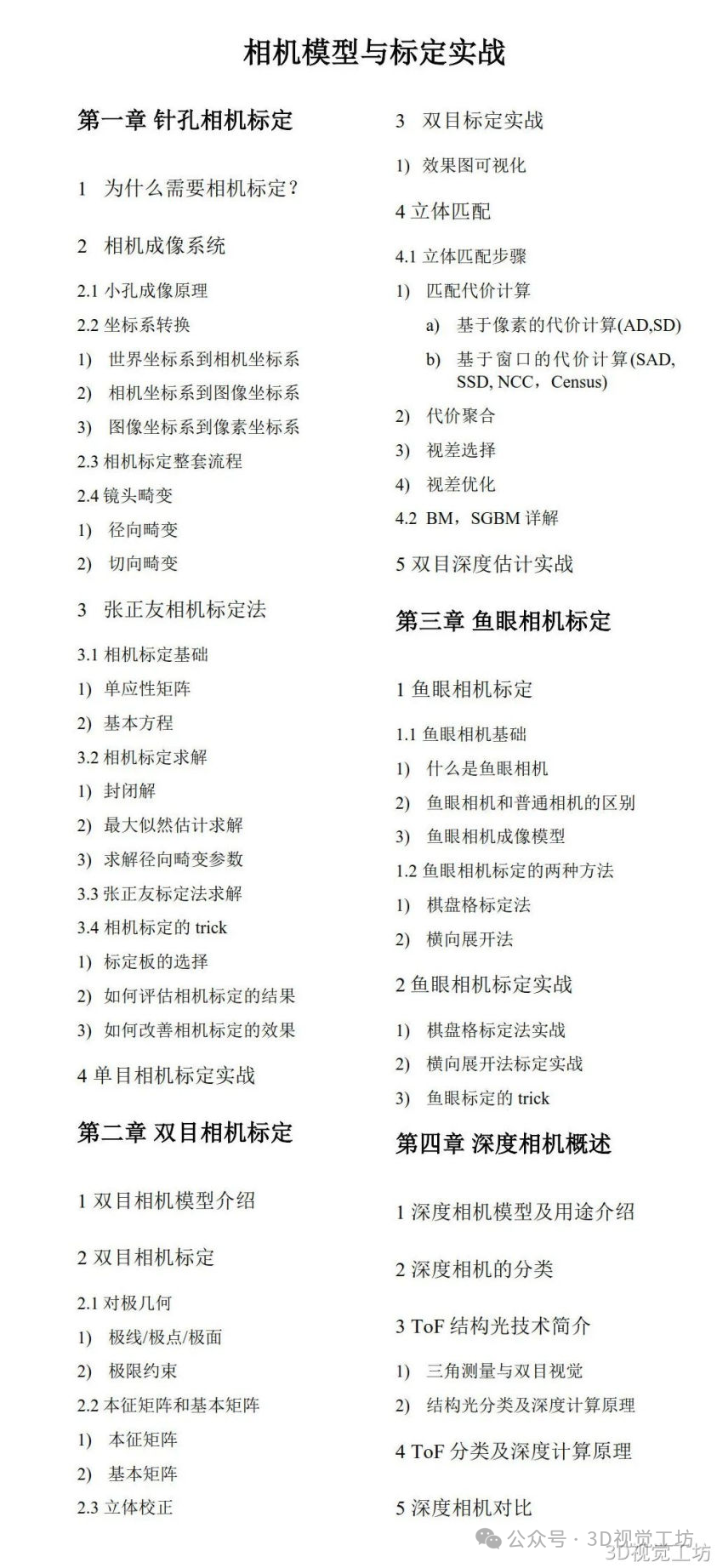
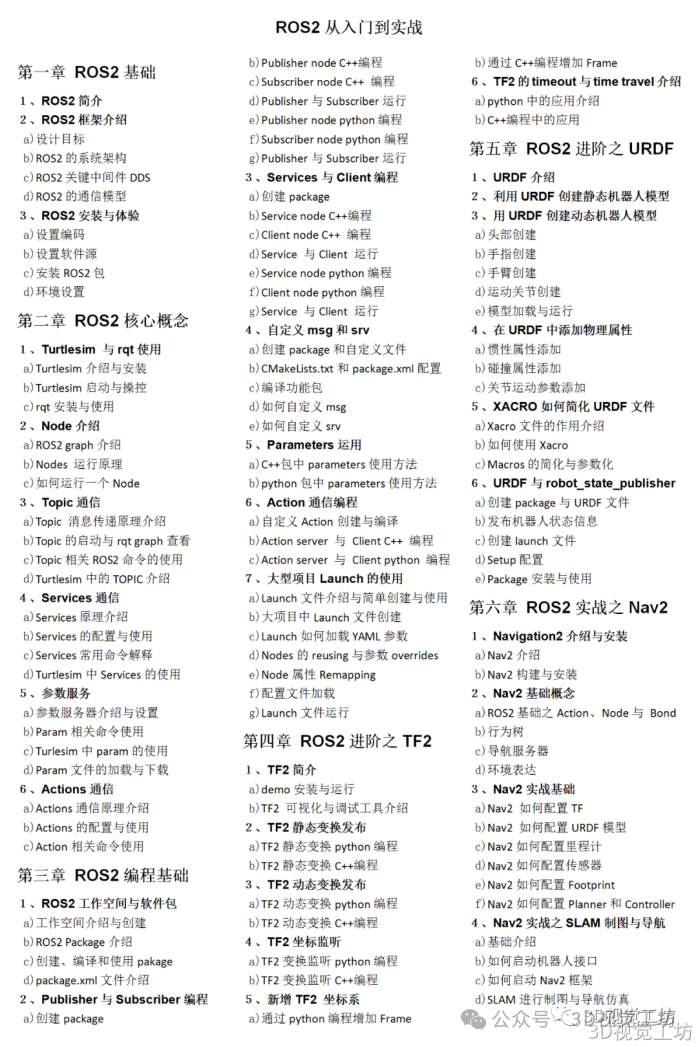
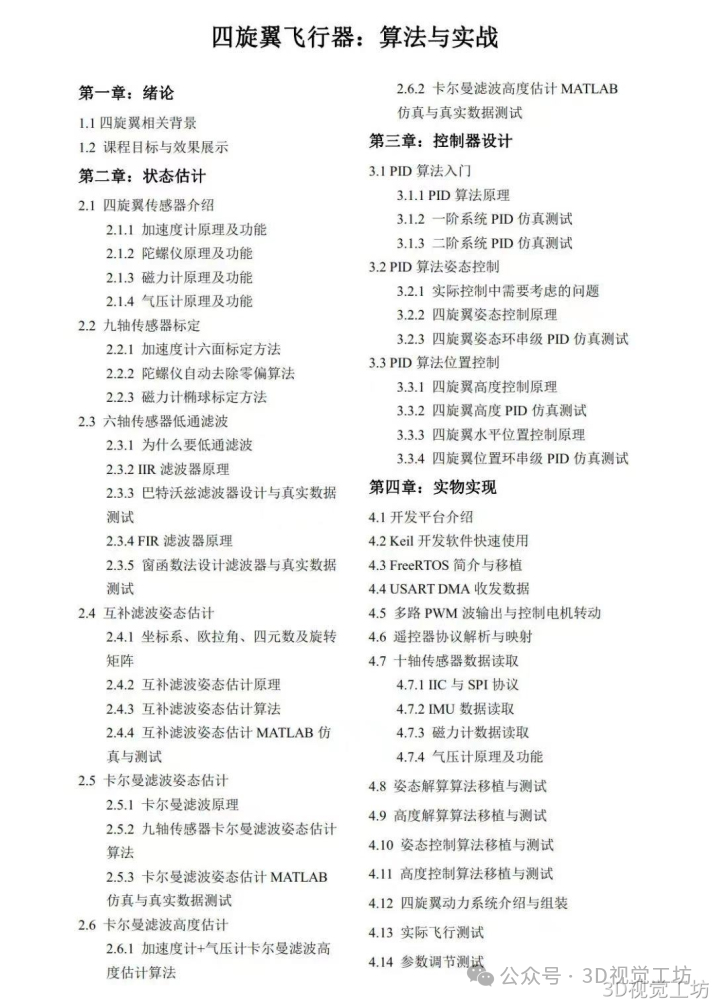
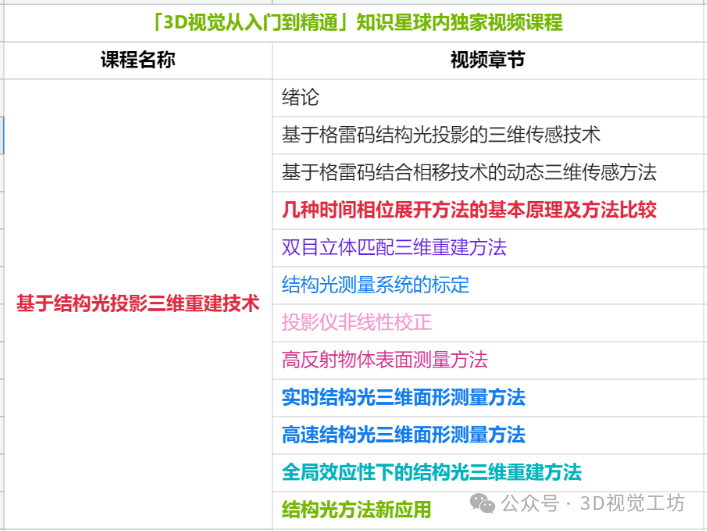
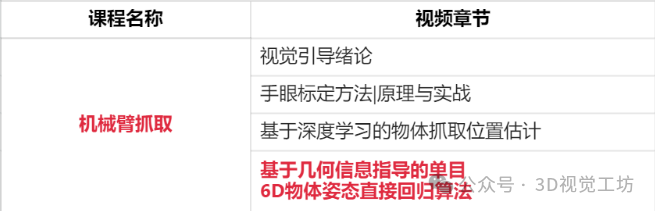
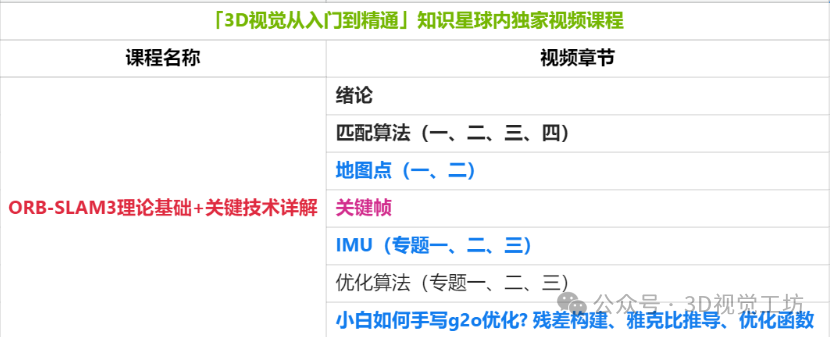
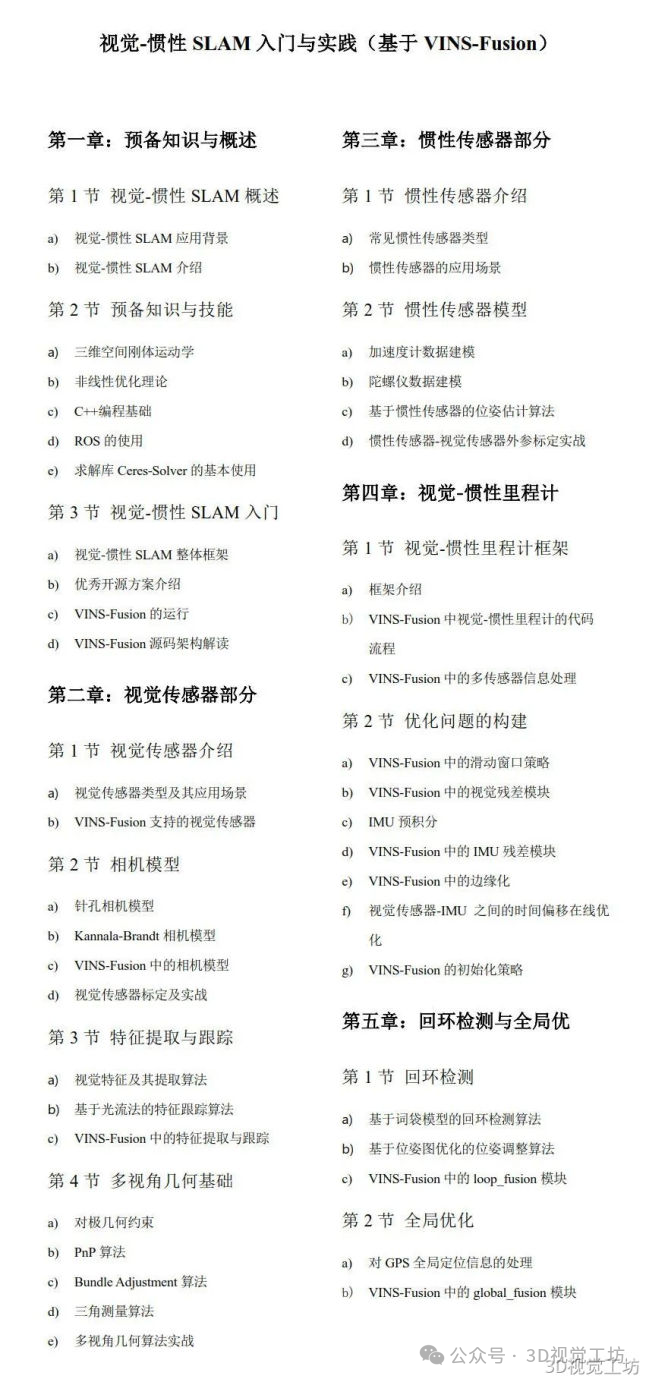
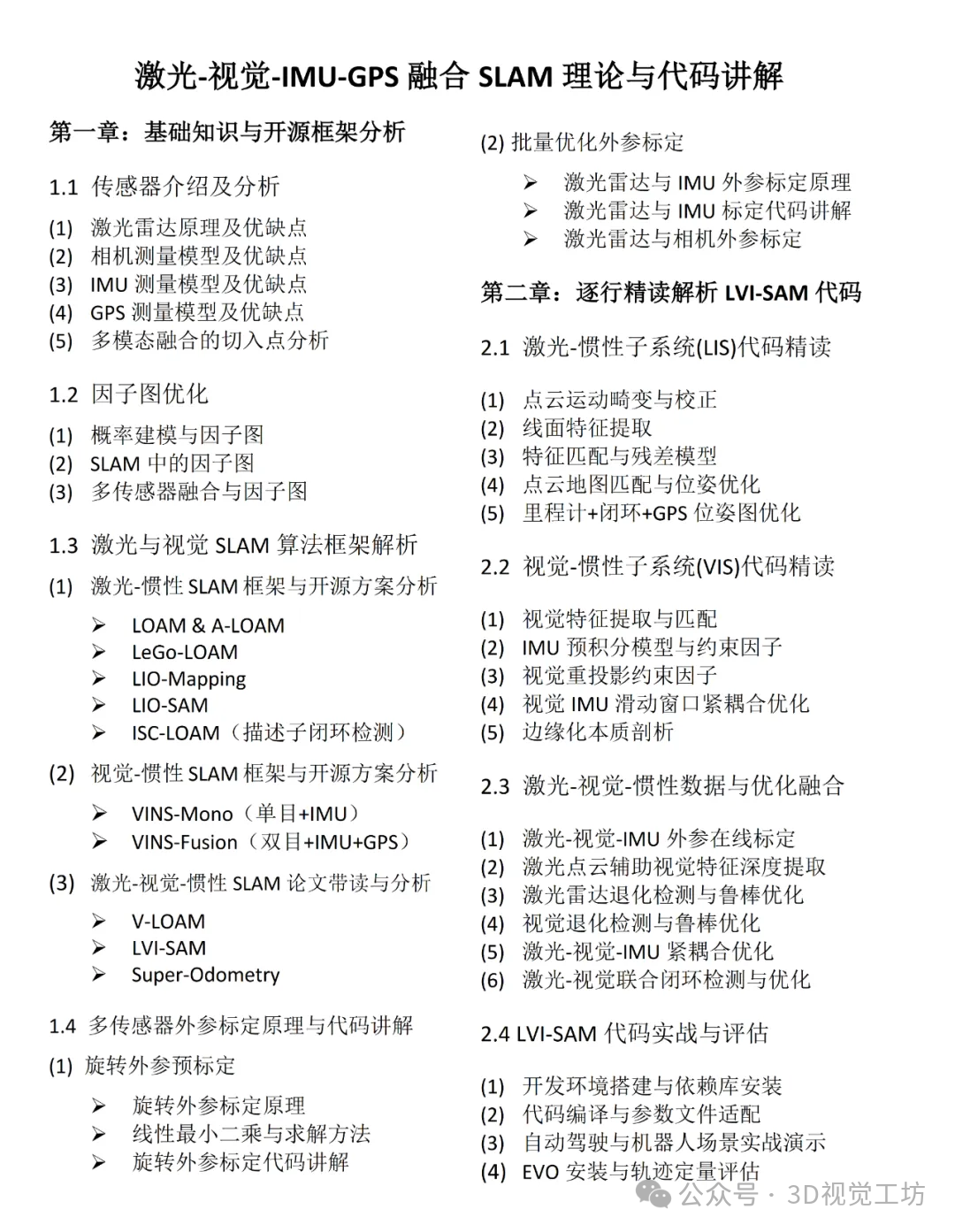
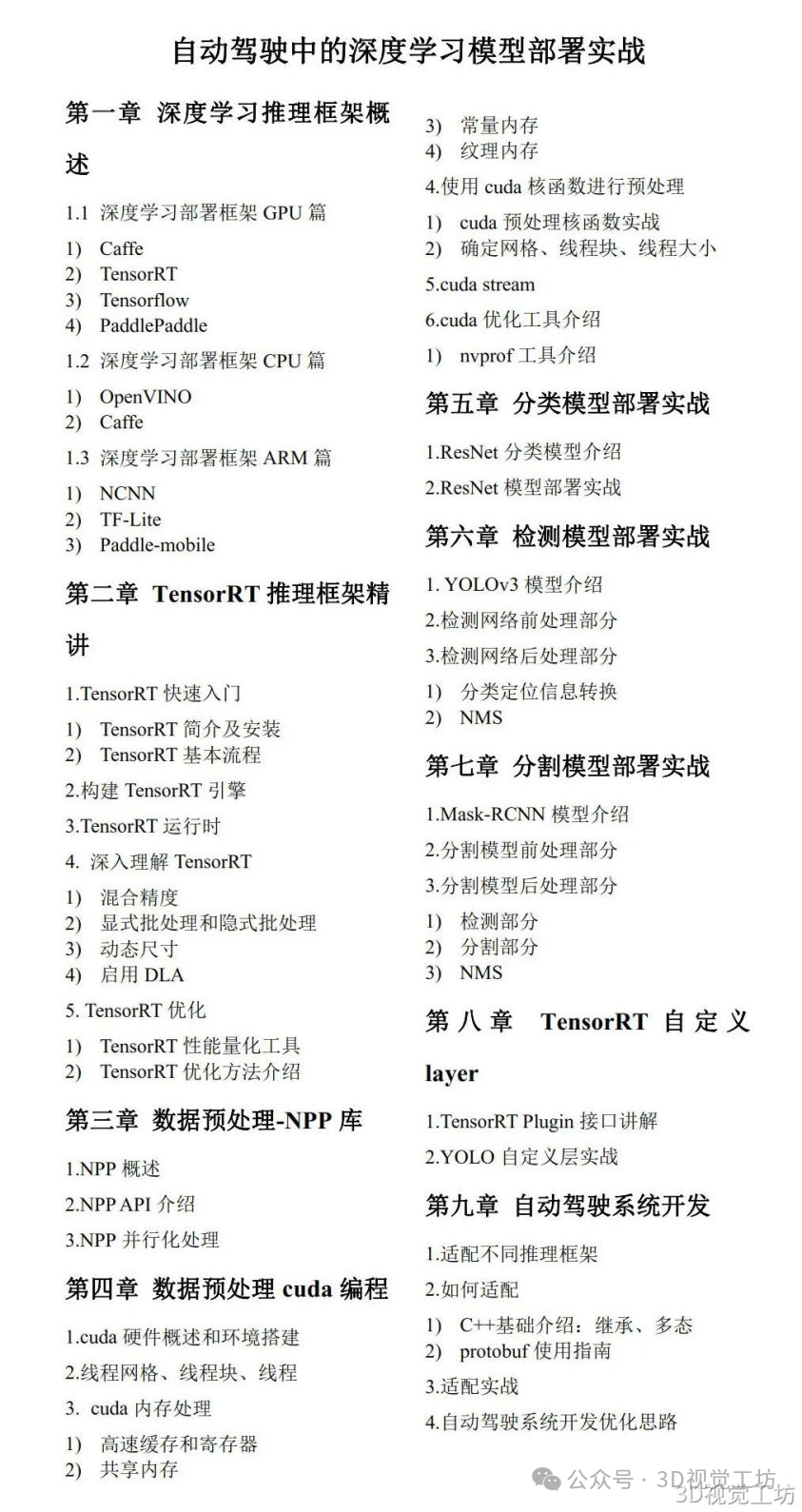
星球内系列视频课程

<<< 左右滑动见更多 >>>
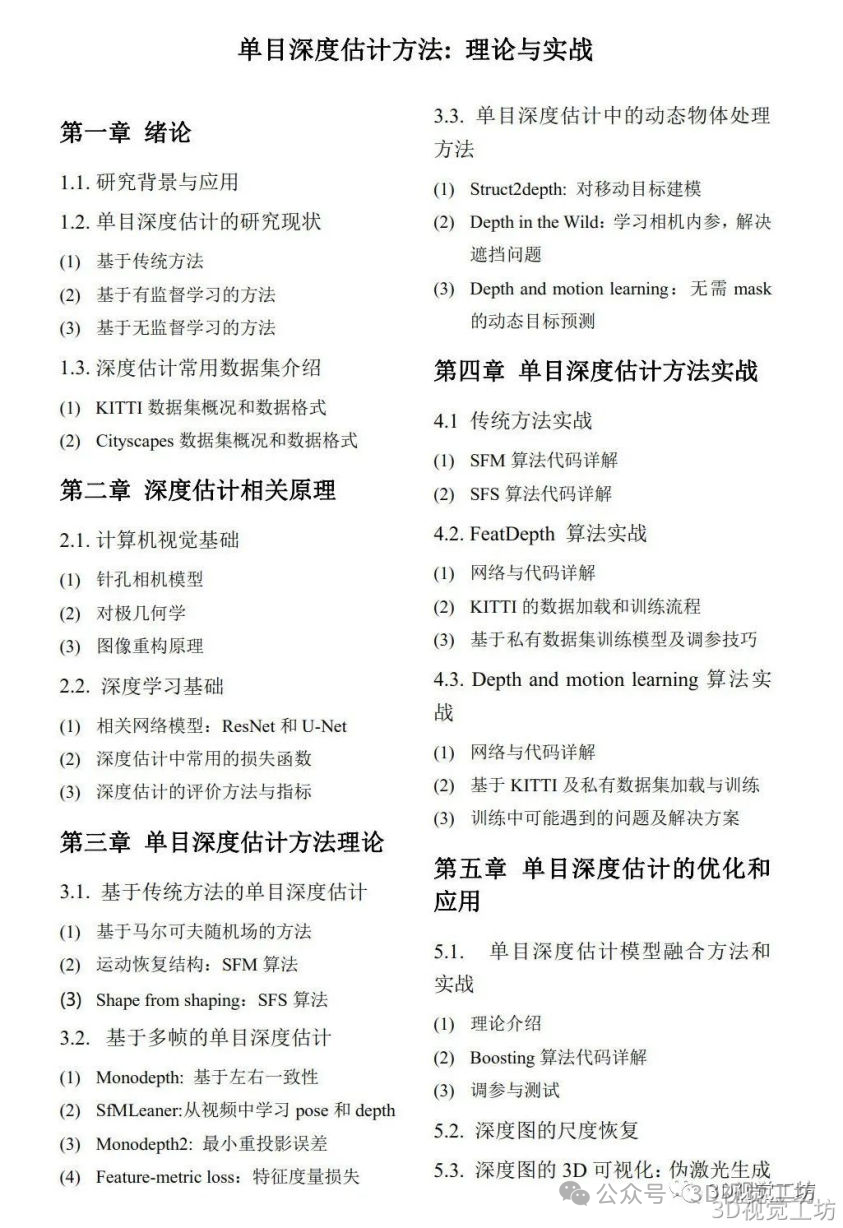
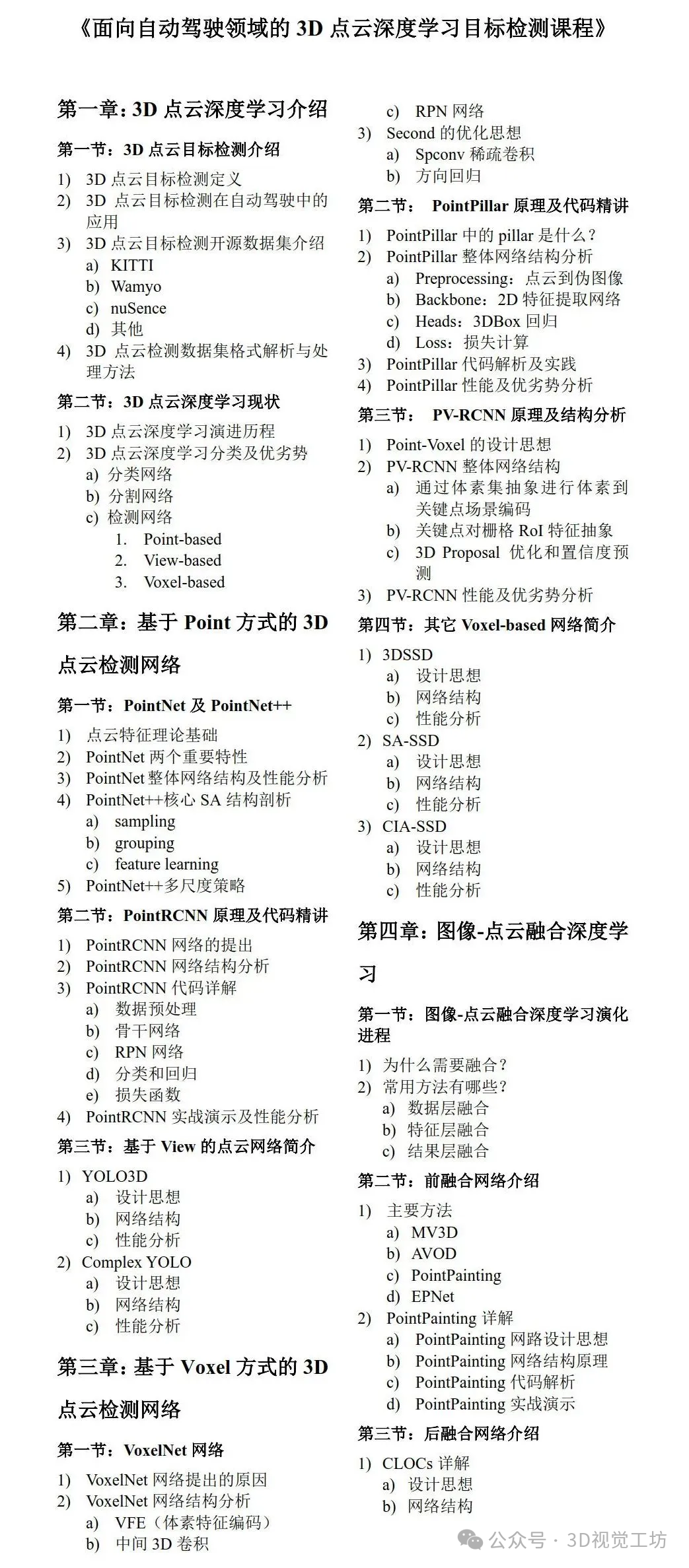
接下来详细展示下各个课程的大纲目录。
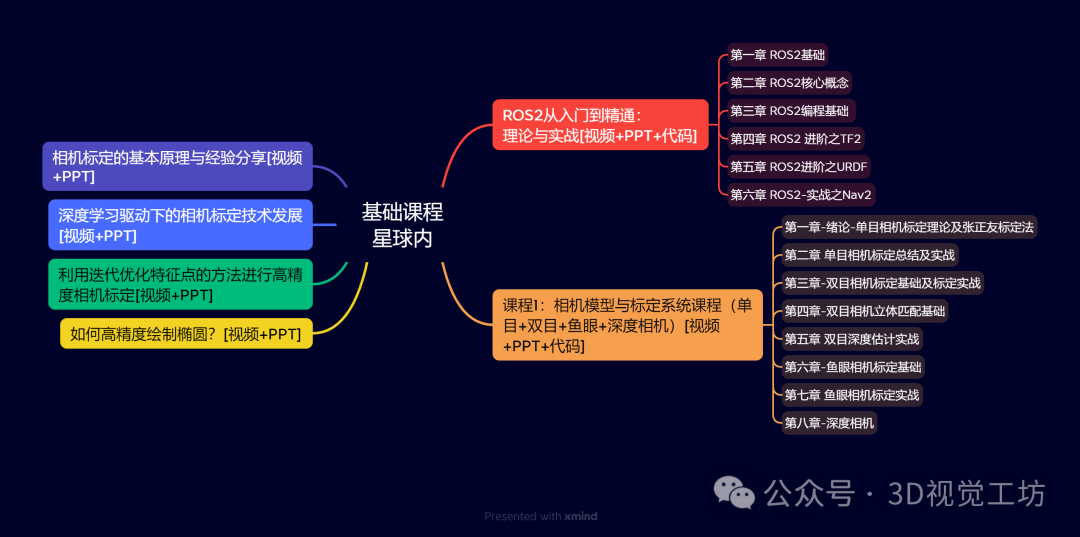
基础课程介绍
工业3D视觉课程


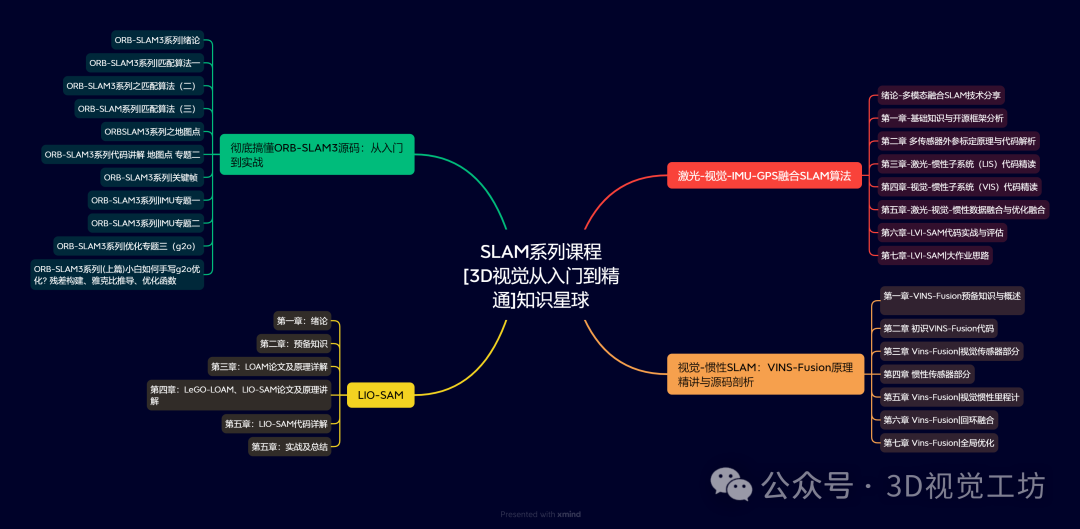
SLAM系列课程

自动驾驶课程
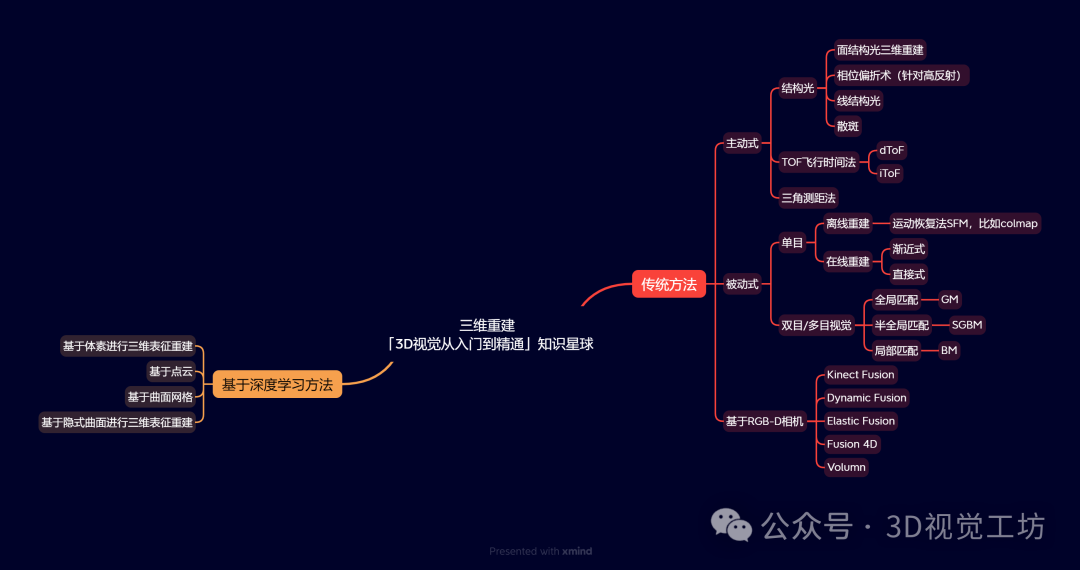
三维重建课程
 学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款

星球内3D视觉各个方向公开课分享[视频+PPT]

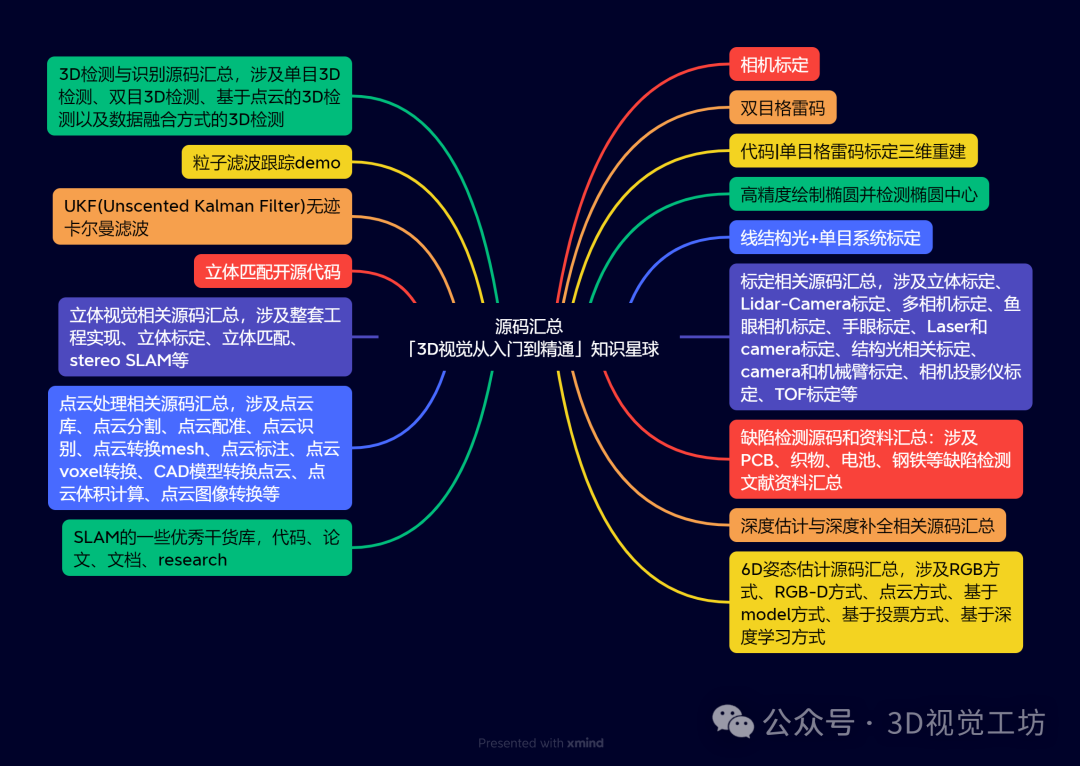
3D视觉各个方向源码总结
3D视觉各个方向学习路线总结
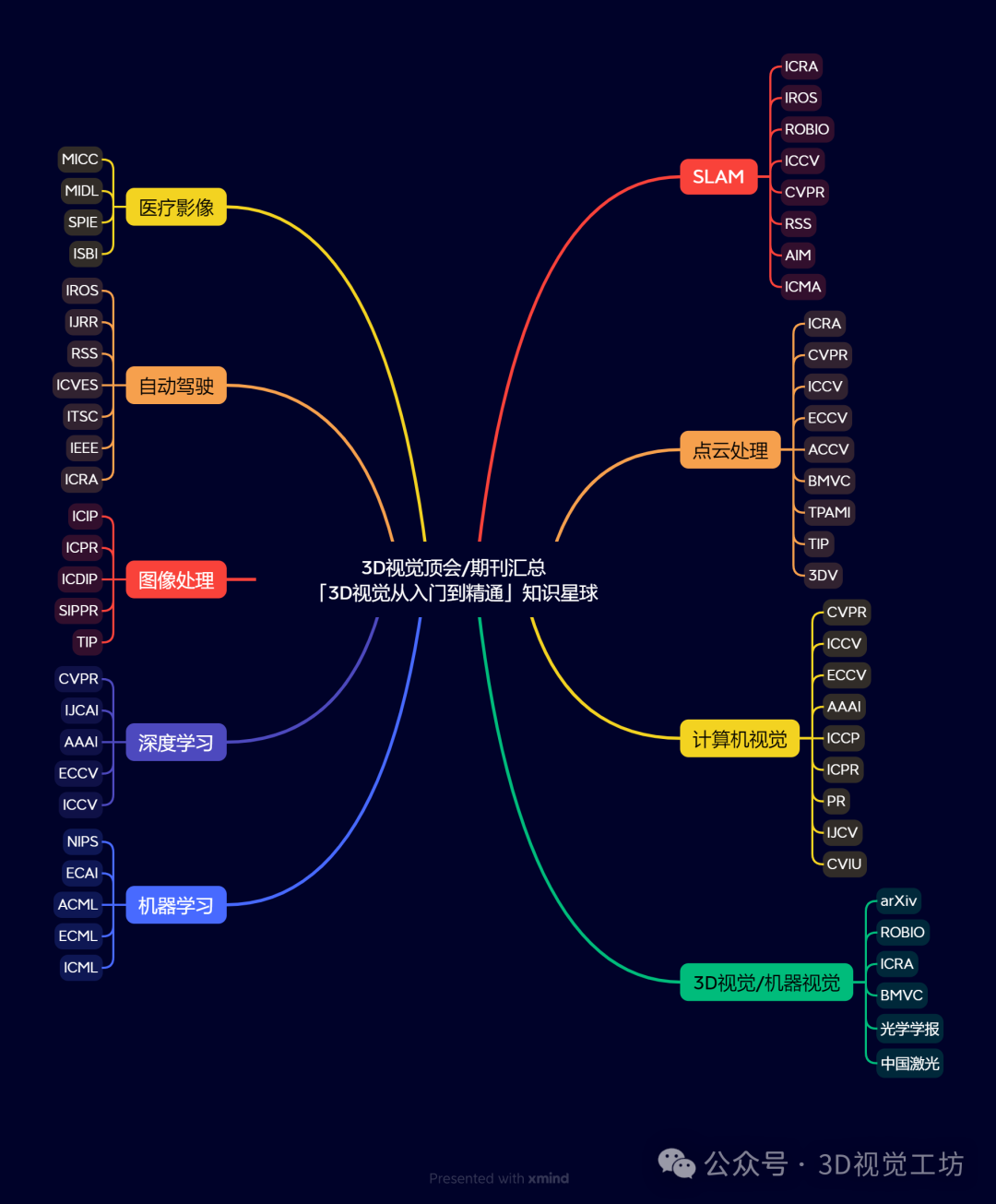
3D视觉顶会/期刊总结
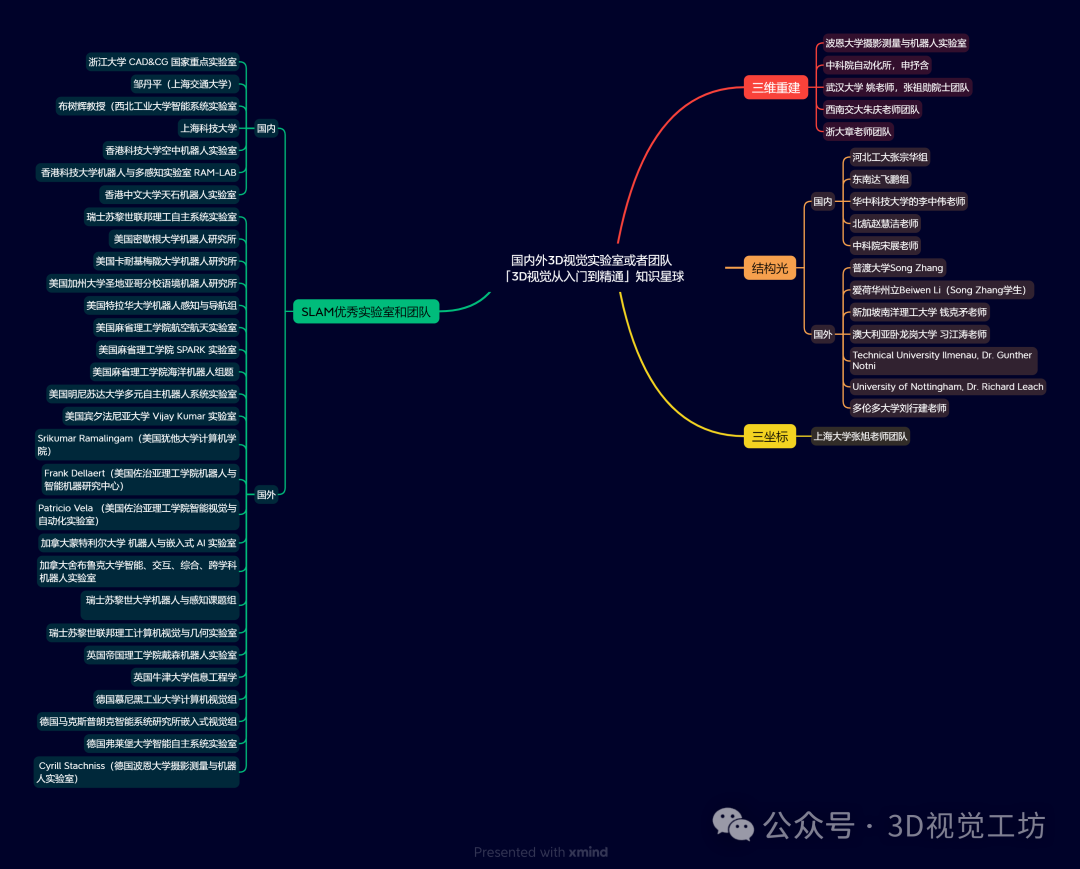
国内外3D视觉实验室或团队总结
星球内问答示例


3D视觉项目资源优先对接
星球内经常会发布3D视觉行业项目,目前已经发布过的项目包括:
10W | 项目需求:履带小车使用大疆Mid360激光雷达做草莓大棚场景下的建图、路径自动控制
硕士毕业大论文(计算机专硕)
毕业论文辅导(深度学习的点云配准这块)
0.5W|毕业论文辅导|基于ROS的机器人自主导航的研究
5~8w|项目需求:Appen——深度摄像机成像软件技术服务
10~20万|基于移动平台的算法加速
8~15万|项目需求:开发7自由度机械臂高效、精准的控制器
毕业论文辅导(深度学习的点云配准这块)
硕士毕业大论文(计算机专硕)
5W~8W|项目需求:视觉三维重建
水电站自流洞巡检项目
...
3D视觉行业最新传感器模组介绍
3D视觉行业最新传感器模组,星球内常常会第一时间分享,包括奥比中光的3D相机模组、先临三维的激光扫描仪、结构光相机、激光雷达、相机镜头等,这对项目中快速选型还是非常有利的。




















 942
942

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









