






点击下方卡片,关注「3DCV」公众号
选择星标,干货第一时间送达
编辑:3DCV
添加小助理:dddvision,备注:方向+学校/公司+昵称,拉你入群。文末附行业细分群
扫描下方二维码,加入3D视觉知识星球,星球内凝聚了众多3D视觉实战问题,以及各个模块的学习资料:近20门视频课程(星球成员免费学习)、最新顶会论文、3D视觉最新模组、3DGS系列(视频+文档)、计算机视觉书籍、优质3D视觉算法源码等。想要入门3D视觉、做项目、搞科研,欢迎扫码加入!

本人主要研究机器视觉,之前看过一些ICRA和IROS的论文,了解到这两个会议的论文该期刊(RA-L)也有收录。在web of science上可以检索到该期刊的论文,但是由于这是个新期刊并没有中科院分区,那么在该期刊投论文可以计入博士毕业SCI要求吗?
来源:知乎 | 编辑:3DCV
链接:zhihu.com/question/325255380
Logan


(2024.6.20)更新一下,目前RAL, IF 4.6, 在JCR分区中,属于2区,在中科院分区中,属于二区(TOP)。
更新一下,目前RAL, IF 5.2, 在JCR分区中,属于2区,在中科院分区中,属于二区(TOP)。
RAL的质量还是有保证的,大于IROS, ICRA平均水准。
2020年6月刚出了影响因子,影响因子3.6,JRC1区,略高于AURO, RAM, JFR
在机器人期刊中
神仙档:Science Robotics & Nature Machine Intelligence & IJRR (International Journal of Robotics Research), T-RO (Transactions on Robotics)
Top档:T-ASE (Transactions on Automation Science and Engineering) & JFR (Journal of Field Robotics) & T-Mech (Transactions on Mechatronics)
第二梯队:IEEE Robotics and Automation Letters (RAL), AUTONOMOUS ROBOTS (AURO), Robotics and Automation Magazine (RAM), Robotics and Autonomous Systems (RAS),
匿名用户
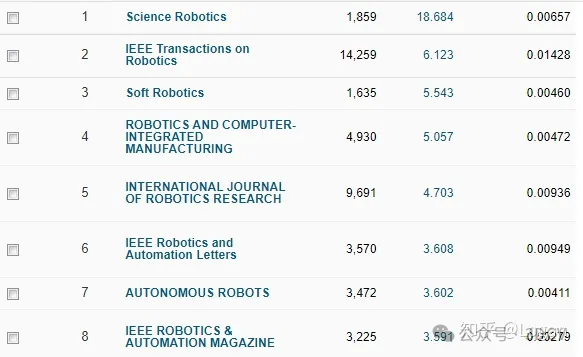
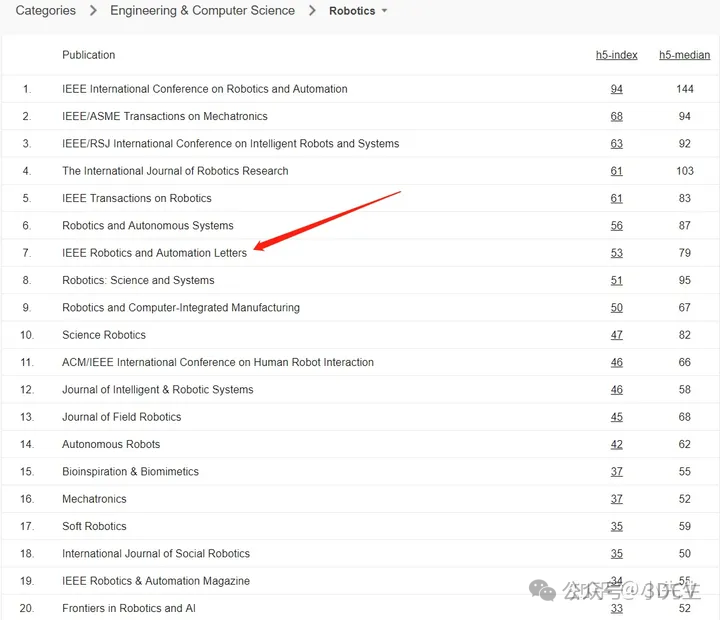
RAL 2020年影响因子为3.6,在robotics领域里排名第6,仅次于IJRR (难以置信…)。
另外从现在开始TRO不接受短文了,也就是说RAL在这个society里的定位很明显了,就是替代TRO短文的存在(而TRO则是跟IJRR看齐,专攻高质量高影响力的大作)。不过我要说明一点,目前RAL录用文章的平均质量其实达不到TRO短文的标准……
在机器人领域里认可度大致分为以下几档,同一档排名不分先后:
第一档 (对于青年学者而言,有一篇横着走):
Science Robotics (侧重材料以及新颖的设计,算法技术细节不如IJRR和TRO硬核)
IJRR ,TRO (传统老牌顶刊,录取非常严格,只收极高质量的长文)
第二档(较不错的工作,拿出来展示绝不丢人):
JFR(对户外实验结果要求极高,但不要求理论创新)(2021/01/07更,这个期刊于去年发生了重大变革,导致创刊主编与编委团集体辞职,新晋主编及其团队论资历相较同级别期刊差太多了,实在令人惋惜)
RAL(新晋第二档主流期刊,侧重短和快)
RAS,AuRo(历史悠久,口碑在线,侧重全面的分析与实验)
第三档(反正知道你有一篇文章,仅此而已):+其余所有期刊
以下是原回答:IEEE RA-L 目前已被SCI收录,即将于2020年获得首个影响因子。就影响力与认可度而言,这个期刊可以算是robotics领域里仅次于IJRR和TRO的综合性期刊了,这个从全球各大顶尖实验室的publication list就可以看出。考虑到IJRR和TRO收文量太少,反倒是RA-L基本上能反映出了整个robotics领域在这一年度的热门研究成果,并且作为ICRA和IROS的升级版,无论难度还是质量还是有保证的。
IEEE RA-L承诺从投稿到给final decision半年以内,并且录用后还可以顺便参加顶会(虽说期刊与会议是独立决策,但考虑到RA-L的难度大于会议,所以文章质量要是能被RA-L最终录用的话会议那边也一般不会拒的),无论如何诱惑都是非常大的。
如果说手上有IJRR和TRO可以被认作是robotics领域的顶尖大牛的话,相对亲民一些的RA-L则是优秀roboticist的入场券。如果是海外求职,特别是混一流大学的robotics圈的话,没道理手上没篇RA-L来证明自己的实力;而国内目前主要还是维影响因子论,从这个角度短期内RA-L甚至robotics这个领域可能都不是首选,这就需要一些时间来做到和国际接轨了……
高飞
已经是SCI了。IEEE RAS亲儿子,现在除了TRO就在大力推RAL了,绝对错不了,我很看好RAL。分区不用指望太高,毕竟收文量较大,不过也不会差。
不得不说robotics顶刊的发文量实在是太少了,是真的难。并且领域发展快,期刊周期长跟不上,天天被人诟病,RAL的诞生也是为了解决prof/phd们期刊太难发的状况。
Jin Wu
比较容易发,好几个会议都可以选RAL的option,比如ICRA、IROS、CASE,当然这些会议都是盛会(主要是认识大佬),和传统顶会RSS、CVPR、ICCV有较大差距。从录用率来看大概在30%左右,实验室一年内发表了十篇左右,没听说有据稿的。从难度上来看跟其他IEEE Letters差不多,略低于IEEE Signal Processing Letters。影响力至少目前在国内是很难和Transactions系列比较的,收的论文数量也比较多。2020年的数据来看第一季度已经发了500篇左右了,而IEEE Robotics and Automation Society的几个刊物如TRO、TASE、THAP等等都保证每年只刊发100~200的量。
从文章质量上来看,差异很大,原因可能是广泛收稿且编委会成员人数较多较杂(上百位AE)。有一些对领域很有意义的结果,但也有较多的成果属于炒冷饭甚至是较low的。因此个人认为从学术的角度来看,是个不错的期刊,可并无法成为在领域内封神的刊物。成立这个期刊对于当下国内外机器人系列的博士难毕业的情况可能略有帮助,短期内不太可能具有超越老牌刊物的能力。
Zestful Zackbot
是SCI
本人中过两篇,感觉IEEE RAL还挺不错的,可以同ICRA、IROS等机器人领域的顶会论文联投,目前还在上升期。创刊初期之前一直有很多大佬投稿,把这个期刊撑起来了,底子就很好!
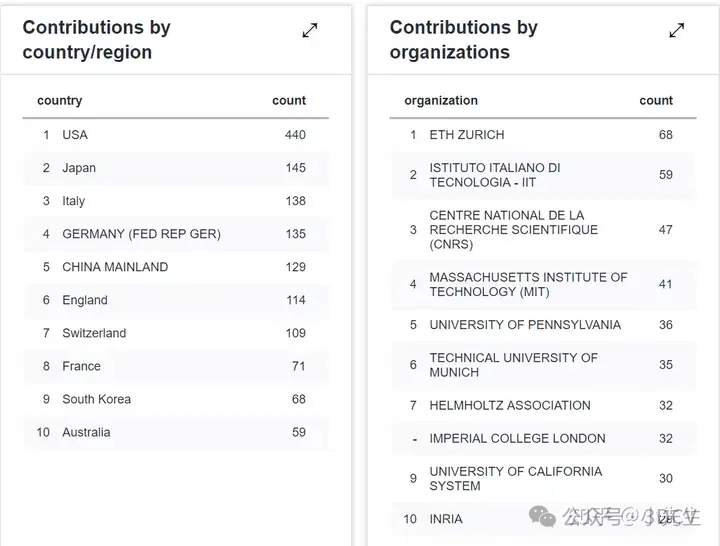
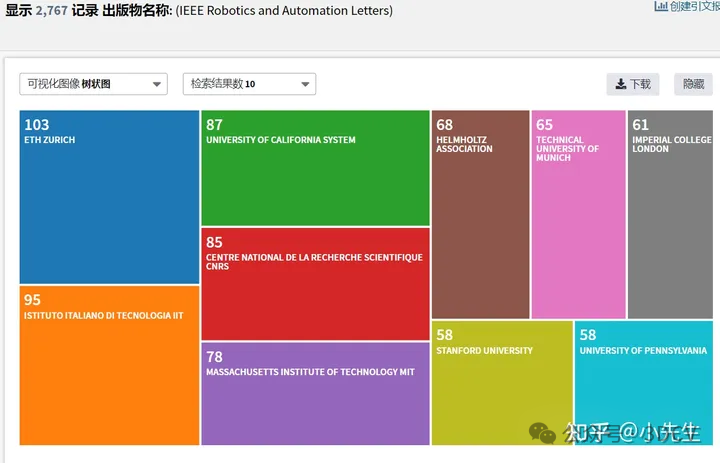
IEEE RAL论文的主要的贡献机构是很不错的,例如:苏黎世理工、意大利技术研究院(意大利最好的研究机构)、CNRS、麻省理工、斯坦福等......
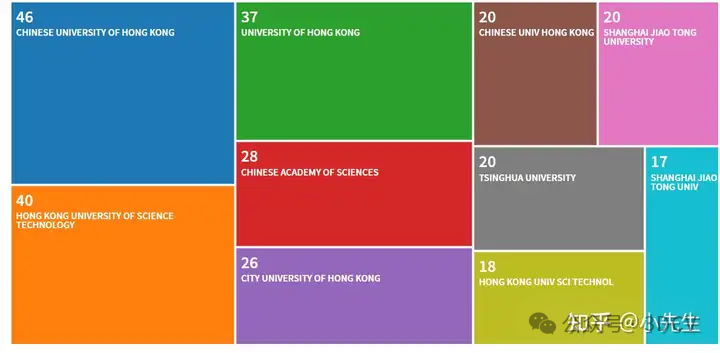
国内的主要贡献机构是港校居多,例如:港中文、港科大、港大、港城大等,内陆主要是中科院、清华、上交等。可见机构的相对质量还是挺高的。
IEEE RAL在h5-index在期刊中排名不错,说明期刊影响力足足的。
匿名用户
如果一篇ICRA级别的论文没有野心,那大多数人会选择RA-L option。
这样这篇paper既能开会,又能算一篇journal。如果一篇paper作者非常重视,并且有意接着做这个方向,未来打算转投更好的journal (e.g. IJRR, T-RO),那作者一般不会选择投RA-L。
当然还有一种可能,原先打算选择RA-L option的paper,但是赶不上RA-L的DDL,最终只能选择投ICRA。
因此,根据个人这几年审稿投稿的经验,RA-L的paper上限不太高不如ICRA一些很好的工作,但下限可能比ICRA一些比较“水”的工作稍微高点,毕竟ICRA,IROS的paper鱼龙混杂的蛮多的。
本文仅做学术分享,如有侵权,请联系删文。
3DCV技术交流群
目前我们已经建立了3D视觉方向多个社群,包括2D计算机视觉、大模型、工业3D视觉、SLAM、自动驾驶、三维重建、无人机等方向,细分群包括:
2D计算机视觉:图像分类/分割、目标/检测、医学影像、GAN、OCR、2D缺陷检测、遥感测绘、超分辨率、人脸检测、行为识别、模型量化剪枝、迁移学习、人体姿态估计等
大模型:NLP、CV、ASR、生成对抗大模型、强化学习大模型、对话大模型等
工业3D视觉:相机标定、立体匹配、三维点云、结构光、机械臂抓取、缺陷检测、6D位姿估计、相位偏折术、Halcon、摄影测量、阵列相机、光度立体视觉等。
SLAM:视觉SLAM、激光SLAM、语义SLAM、滤波算法、多传感器融合、多传感器标定、动态SLAM、MOT SLAM、NeRF SLAM、机器人导航等。
自动驾驶:深度估计、Transformer、毫米波|激光雷达|视觉摄像头传感器、多传感器标定、多传感器融合、自动驾驶综合群等、3D目标检测、路径规划、轨迹预测、3D点云分割、模型部署、车道线检测、BEV感知、Occupancy、目标跟踪、端到端自动驾驶等。
三维重建:3DGS、NeRF、多视图几何、OpenMVS、MVSNet、colmap、纹理贴图等
无人机:四旋翼建模、无人机飞控等
除了这些,还有求职、硬件选型、视觉产品落地、最新论文、3D视觉最新产品、3D视觉行业新闻等交流群
添加小助理: dddvision,备注:研究方向+学校/公司+昵称(如3D点云+清华+小草莓), 拉你入群。

3D视觉技术星球
3D视觉从入门到精通知识星球、国内成立最早的3D视觉学习交流社区。包括:星球视频课程近20门(价值超6000)、项目对接、3D视觉学习路线总结、最新顶会论文&代码、3D视觉行业最新模组、3D视觉优质源码汇总、书籍推荐、编程基础&学习工具、实战项目&作业、求职招聘&面经&面试题等等。欢迎加入3D视觉从入门到精通知识星球,一起学习进步。

3DGS、NeRF、结构光、相位偏折术、机械臂抓取、点云实战、Open3D、缺陷检测、BEV感知、Occupancy、Transformer、模型部署、3D目标检测、深度估计、多传感器标定、规划与控制、无人机仿真、三维视觉C++、三维视觉python、dToF、相机标定、ROS2、机器人控制规划、LeGo-LAOM、多模态融合SLAM、LOAM-SLAM、室内室外SLAM、VINS-Fusion、ORB-SLAM3、MVSNet三维重建、colmap、线面结构光、硬件结构光扫描仪,无人机等。

3D视觉相关硬件
| 图片 | 说明 | 名称 |
|---|---|---|
 | 硬件+源码+视频教程 | 精迅V1(科研级))单目/双目3D结构光扫描仪 |
 | 硬件+源码+视频教程 | 深迅V13D线结构光三维扫描仪 |
 | 硬件+源码+视频教程 | 御风250无人机(基于PX4) |
 | 低成本+体积小 +重量轻+抗高反 | YA001高精度3D相机 |
 | 抗高反+无惧黑色 +半透明 | KW-D | 高精度结构光开源相机 |
 | 硬件+源码 | ROS-SLAM两轮差速小车NanoBot |
 | 配套标定源码 | 高精度标定板(玻璃or大理石) |
| 添加微信:cv3d007或者QYong2014 咨询更多 | ||

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









