







 SSPU-Net是ACM MM 2021接受的论文,提出了一种自监督的点云数据上采样方法。通过NEU单元和DRU模块,将稀疏点云转换为稠密点云并渲染成多视图图像。使用形状一致性和图像一致性损失函数进行训练。在SSPU数据集上的实验表明,SSPU-Net与有监督方法相比表现相当。
SSPU-Net是ACM MM 2021接受的论文,提出了一种自监督的点云数据上采样方法。通过NEU单元和DRU模块,将稀疏点云转换为稠密点云并渲染成多视图图像。使用形状一致性和图像一致性损失函数进行训练。在SSPU数据集上的实验表明,SSPU-Net与有监督方法相比表现相当。
SSPU-Net
Accepted by ACM MM 2021
1. 研究动机:
传统的点云数据通过基于Ground Truth的有监督的方式实现数据上采样的工作,而本文提出了一种可以基于自监督的方式实现点云数据上采样。
为什么要上采样?因为一般采集到的点云数据通常是稀疏的,对于一些局部的几何结构表达不够好,可能会影响下游的处理任务。所以,有必要对稀疏点云进行上采样,以生成稠密完整的点云,从而方便后续的点云处理任务。
创新点:、
- NEU(neighbor expansion unit)模块 — 领域扩展单元
- DRU(differentiable point cloud rendering unit)模块 — 可微渲染单元
2. 网络结构:
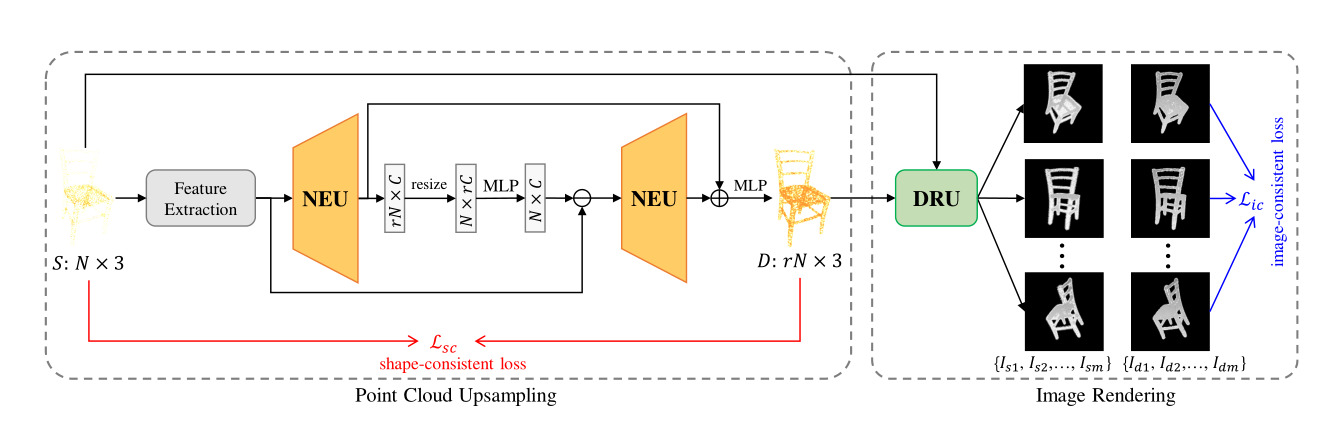
2.1 整体网络结构:
首先通过一种邻域扩展单元(NEU)来将稀疏点云向上采样为稠密点云,利用每个点的局部几何结构自适应地学习权重来插值新点的特征。然后通过一个可微渲染单元(DRU),将输入的稀疏点云和生成的密集点云渲染成多视点图像。为了使稀疏点云和稠密点云具有相似的几何结构,我们在点云上构造了形状一致性损失,在渲染图像上构造了图像一致性损失来训练点云上采样网络。
2.2 NEU单元:
变量说明:
r: 上采样率
c: 特征维度,一般点云数据的坐标是三维坐标
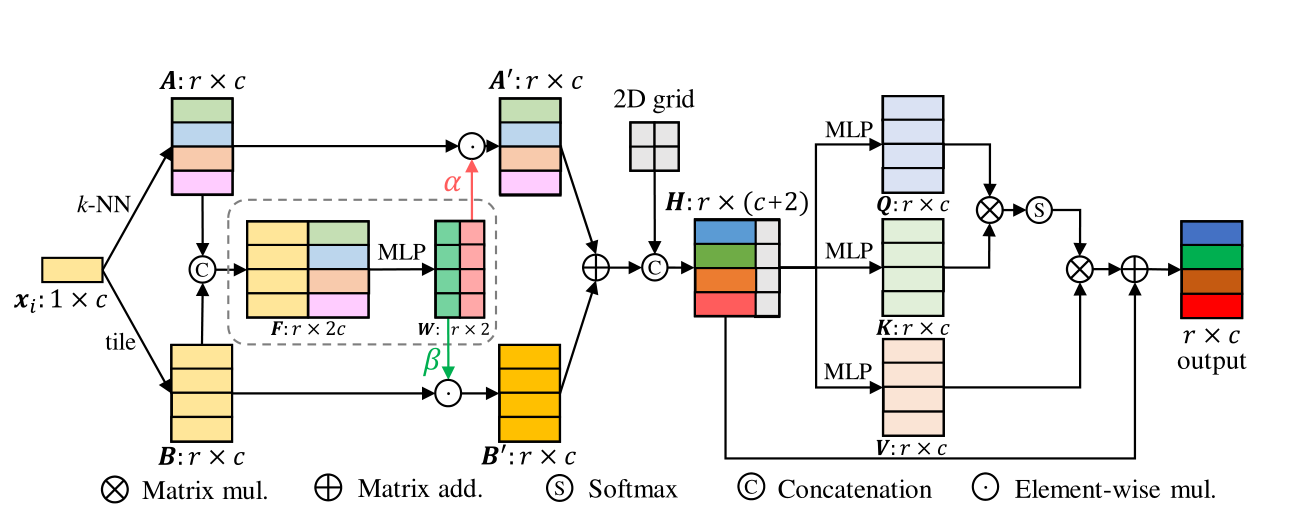
X i X_i Xi代表给定的输入点云数据中的一个点,首先我们选取该点临近的r个点的特征构建出特征图A,同时我们重复时使用该点特征r次构建出特征图B,然后对两个特征图进行concat得到特征图F,然后通过MLP自适应学习权重用于插值。 α \alpha α和 β \beta β分别表示临近点和中心点的权重, γ \gamma γ代表激活函数然后通过如下公式计算插值点的坐标信息:

为了更好的融合特征,还采用了2D grid和自注意力机制。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3253
3253

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









