






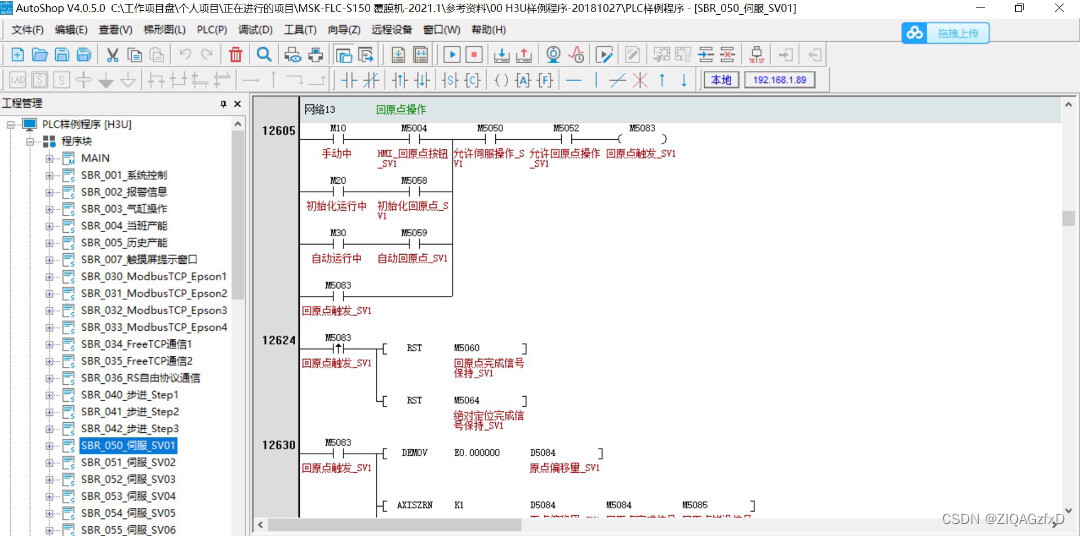
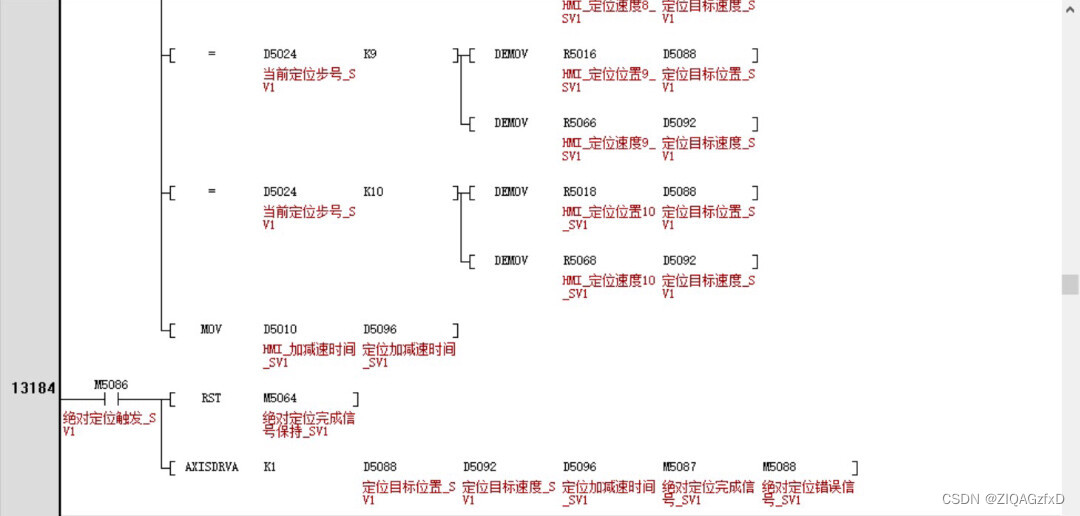
汇川H3U标准程序,程序包含本体三个脉冲轴控制,CANLINK总线控制16个伺服,与机械手MODBUS TCP通讯,程序结构清晰明了,另有触摸屏程序。

标题:汇川H3U标准程序之控制策略与通讯协议分析
摘要:本文将对汇川H3U标准程序进行详细分析,重点探讨其控制策略和通讯协议。首先,我们将介绍该程序的结构和功能,包括本体三个脉冲轴控制、CANLINK总线控制16个伺服以及与机械手MODBUS TCP通讯。接着,我们将深入分析其控制策略,包括如何实现精准的轴控制、总线控制的优化方法以及通讯协议的设计与实现。最后,我们将对该程序的触摸屏程序进行简要介绍和评估。
-
引言 汇川H3U标准程序是一种为工业自动化领域开发的高级控制系统。它采用先进的控制策略和通讯协议,可以实现多轴控制和与外部设备的高效通讯。本文旨在对该标准程序进行深入剖析,帮助读者更好地理解其工作原理和应用场景。
-
程序结构与功能 汇川H3U标准程序的主要结构分为三个部分:本体三个脉冲轴控制、CANLINK总线控制16个伺服和机械手MODBUS TCP通讯。本体三个脉冲轴控制部分负责控制机器的核心运动,如X轴、Y轴和Z轴的精准位置控制。CANLINK总线控制16个伺服用来实现对辅助设备的控制,如伺服电机、气缸等。机械手MODBUS TCP通讯部分使得机器与外部设备可以实现高效的数据交互。
-
控制策略分析 3.1 脉冲轴控制策略 本体三个脉冲轴控制采用了先进的控制算法和闭环反馈机制,保证了轴控制的精确性和稳定性。我们将详细介绍其控制算法原理,并探讨如何通过参数优化和实时校准方法来提高轴控制的性能。
3.2 总线控制优化 CANLINK总线控制16个伺服的优化是提高系统整体性能的关键。本文将研究总线控制的架构设计和数据传输优化方法,以及如何实现伺服之间的协同控制和故障诊断。
-
通讯协议设计与实现 机械手MODBUS TCP通讯在工业自动化中起着重要作用。我们将介绍该通讯协议的设计原理和实现方法,包括数据帧结构、通讯流程和错误处理机制。同时,我们还将探讨如何通过协议优化和网络调试手段来提高通讯的可靠性和实时性。
-
触摸屏程序介绍 汇川H3U标准程序的触摸屏界面是用户与系统交互的重要媒介。我们将简要介绍触摸屏程序的功能和界面设计原则,并对其进行评估,提出改进建议。
-
结论 本文对汇川H3U标准程序进行了全面的分析和评估。通过对控制策略和通讯协议的深入探讨,我们展示了该程序在工业自动化领域的广泛应用前景。同时,我们也指出了改进和优化的方向,以进一步提高系统的性能和稳定性。
相关代码,程序地址:http://lanzouw.top/637825708802.html















 1245
1245











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









