






💥💥💞💞欢迎来到本博客 ❤️❤️💥💥
**🏆博主优势: 🌞🌞🌞**博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭: 行百里者,半于九十。
📋📋📋 本文目录如下: 🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现
💥1 概述
基于残差学习的人机协作装配中机器人控制的任务导向安全领域研究是指利用残差学习方法,在人机协作装配任务中,通过机器人控制技术实现任务导向的安全性研究。在这个领域中,研究者着重关注如何通过机器人控制算法来确保在人机协作装配过程中的安全性,同时保证任务的高效完成。
这一领域的研究通常涉及以下几个方面:
1.
残差学习方法的应用:残差学习是一种深度学习方法,通过学习残差(实际输出与期望输出之间的差异)来训练模型。在人机协作装配中,可以利用残差学习来优化机器人控制策略,以提高任务的安全性和效率。
2.
任务导向的安全性:研究如何将任务目标与安全性相结合,确保机器人在执行任务时不会对周围环境或人员造成伤害。这包括设计适当的控制算法,以确保机器人可以识别和避开潜在的危险情况,比如避免与人员碰撞或避免损坏装配件。
3.
人机协作装配技术:研究如何实现机器人与人员之间的有效协作,以完成装配任务。这可能涉及到开发安全的人机交互界面,以及设计机器人控制算法,使机器人能够根据人员的动作和意图来调整自身行为。
4.
实验验证与系统集成:对研究成果进行实验验证,验证所提出的机器人控制算法在实际装配场景中的有效性和可行性。同时,需要考虑将这些算法集成到实际的人机协作装配系统中,以实现真正的应用。
这一领域的研究对于提高人机协作装配任务的安全性、效率和可靠性具有重要意义,有助于推动工业自动化和智能制造技术的发展。
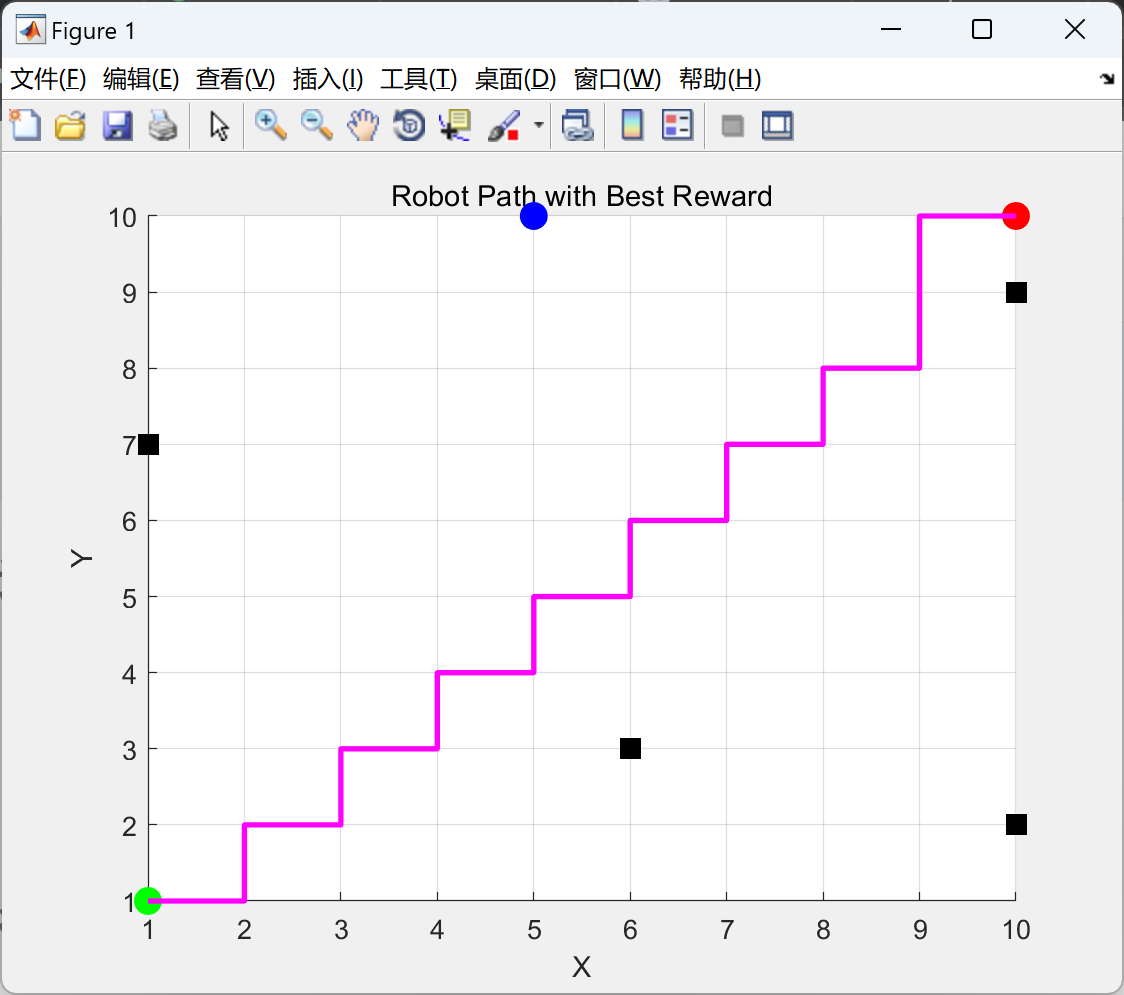
📚****2 运行结果
部分代码:
% Reconstruct the path from start to goal
path = goal;
while ~isequal(path(1,:), start)
idx = find(edges(:,2) == find(ismember(nodes, path(1,:),‘rows’)), 1);
path = [nodes(edges(idx, 1), 😃; path];
end
% Displaying elapsed time and number of nodes in the path
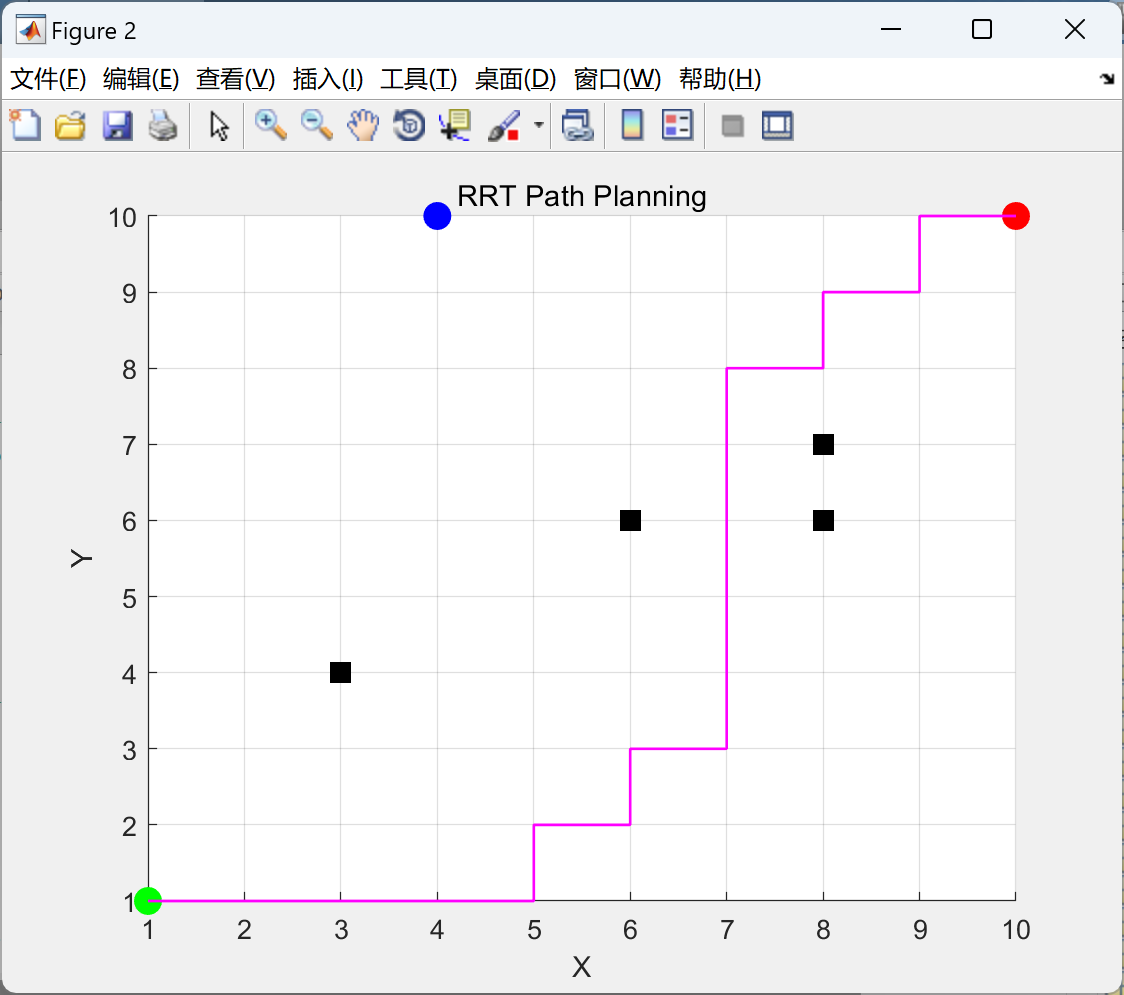
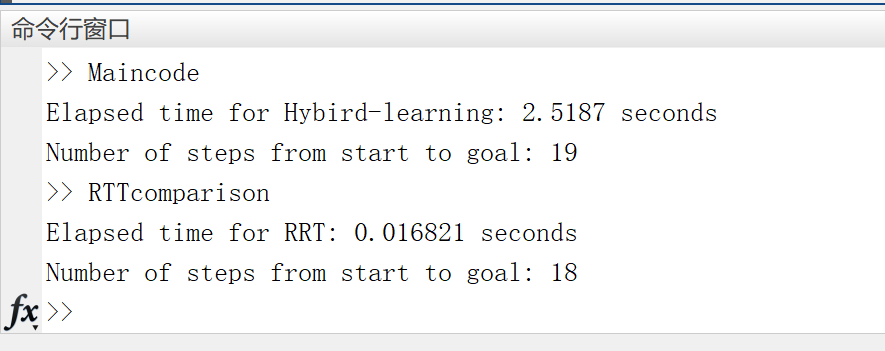
disp(['Elapsed time for RRT: ‘, num2str(elapsed_time), ’ seconds’]);
disp(['Number of steps from start to goal: ', num2str(size(path,1)-1)]); %
subtracting the start node
% Plotting the result
figure;
hold on;
xlim([1, N]);
ylim([1, M]);
plot(obstacles(:,2), obstacles(:,1), ‘ks’, ‘MarkerSize’, 10,
‘MarkerFaceColor’, ‘k’); % Plot obstacles
plot(human(2), human(1), ‘bo’, ‘MarkerSize’, 10, ‘MarkerFaceColor’, ‘b’); %
Plot human
plot(start(2), start(1), ‘go’, ‘MarkerSize’, 10, ‘MarkerFaceColor’, ‘g’); %
Plot start
plot(goal(2), goal(1), ‘ro’, ‘MarkerSize’, 10, ‘MarkerFaceColor’, ‘r’); % Plot
goal
plot(path(:,2), path(:,1), ‘m’, ‘LineWidth’, 1); % Plot path
title(‘RRT Path Planning’);
xlabel(‘X’);
ylabel(‘Y’);
grid on;
hold off;
🎉3********参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
Cheng Zhu (2023) Task-Oriented Safety Field for Robot
[1]吴德文.面向人机协作的工业机器人外力检测研究与实现[D].武汉理工大学,2018.
[2]赵长盛.人机协作机器人的安全控制系统研究[D].东北大学,2019.
[3]陈鹏飞,赵鑫,赵欢.基于示教学习和自适应力控制的机器人装配研究[J].机电工程, 2020,
37(5):7.DOI:CNKI:SUN:JDGC.0.2020-05-018.
🌈4 Matlab代码********实现
最后
从时代发展的角度看,网络安全的知识是学不完的,而且以后要学的会更多,同学们要摆正心态,既然选择入门网络安全,就不能仅仅只是入门程度而已,能力越强机会才越多。
因为入门学习阶段知识点比较杂,所以我讲得比较笼统,大家如果有不懂的地方可以找我咨询,我保证知无不言言无不尽,需要相关资料也可以找我要,我的网盘里一大堆资料都在吃灰呢。
干货主要有:
①1000+CTF历届题库(主流和经典的应该都有了)
②CTF技术文档(最全中文版)
③项目源码(四五十个有趣且经典的练手项目及源码)
④ CTF大赛、web安全、渗透测试方面的视频(适合小白学习)
⑤ 网络安全学习路线图(告别不入流的学习)
⑥ CTF/渗透测试工具镜像文件大全
⑦ 2023密码学/隐身术/PWN技术手册大全
如果你对网络安全入门感兴趣,那么你需要的话可以点击这里👉网络安全重磅福利:入门&进阶全套282G学习资源包免费分享!
扫码领取















 393
393











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









