







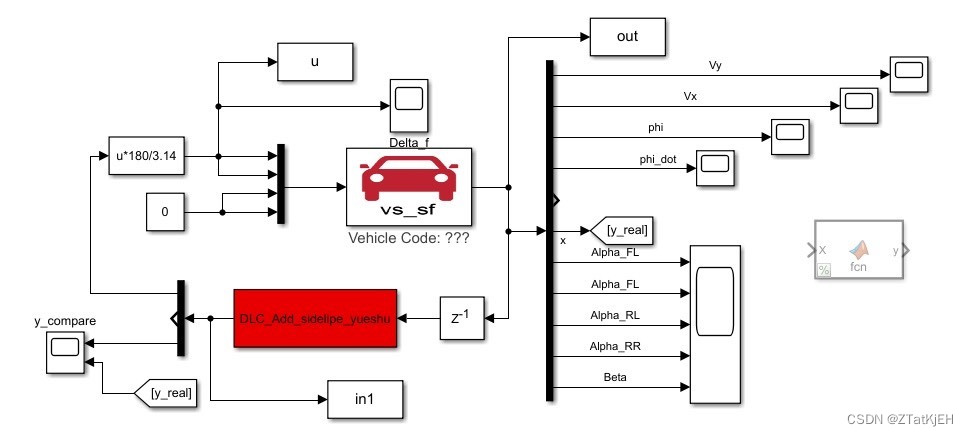
基于mpc模型预测轨迹跟踪控制,总共包含两套仿真,一套是不加入四轮侧偏角软约束,一套是加入四轮侧偏角的软约束控制,通过carsim与simulink联合仿真发现加入侧偏角软约束在进行轨迹跟踪时,能够通过控制四轮侧偏角的变化,较好的实现轨迹跟踪;而不加入侧偏角软约束的,发现车辆由于失去稳定性, 轨迹跟踪失败( 该仿真是学习mpc模型预测算法控制和基于车辆动力学轨迹跟踪控制非常好的学习资料)。
文件中lunwen和文件说明。

基于MPC模型预测轨迹跟踪控制的研究
摘要
本文主要研究了基于模型预测控制(MPC)的轨迹跟踪控制方法。首先,我们针对车辆轨迹跟踪控制问题,建立了一种MPC模型预测控制策略。该策略通过预测车辆未来的动态行为,以及通过优化算法确定最优控制输入,实现对车辆轨迹的有效跟踪控制。其次,为了验证该控制策略的有效性,我们设计了两组仿真实验。第一组仿真实验在不考虑四轮侧偏角软约束的情况下进行,而第二组仿真实验则在考虑四轮侧偏角软约束的情况下进行。通过对比这两组仿真实验的结果,我们可以得出加入四轮侧偏角软约束对于提高轨迹跟踪性能的重要性。
一、引言
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 294
294











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









