







Coursera self-driving car Part1 Final Project——自动驾驶轨迹跟踪之Stanley算法推导及Python实现
同样,该Stanley算法也是用于Coursera self driving car Part1 FinalProject里得横向控制,纵向采用PID控制不赘述。
1.Stanley算法原理
Stanley算法原理相对比较简单,可以处理初始横向误差,航向误差较大得情况。

Stanley控制量前轮转角得产生由两部分构成:
![]() 为了消除车辆航向与参考航向之间得角度差所需得前轮转角,参考航向即为参考点得切线方向
为了消除车辆航向与参考航向之间得角度差所需得前轮转角,参考航向即为参考点得切线方向
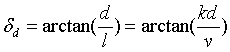
![]() 为了消除横向距离需要得前轮转角
为了消除横向距离需要得前轮转角
![]()
为 我们给定的距离,但如果设定为一个常值,越小,车子就越快接近参考路径,转向角就越大。低速时可能适用,高速时就使车辆变得非常激进,使得系统出现振荡,因此我们通常将其设定为一个与v正比的值
![]()
这个比例系数k越大, 就越小,车辆就越激进。k作为Stanley控制器的一个参数,类似与PID的比例控制,还可以进行改造加入微分积分环节,这里不再赘述。
![]()
![]()
原理就是这样,很简单。
2.Coursera self driving car Part1 FinalProject介绍
Part1 FinalProject参见我得另一篇博客里的2.1小节
Coursera self-driving car Part1 Final Project——无人车轨迹跟踪之MPC模型预测控制原理推导及Python实现
3.Python实现
这里只介绍关键代码的实现.
这个Final project里的设定是提供的waypoints是一个点集,每个时刻都会更新,详见本博客第2小节。waypoints理解为接下来racetrack_waypoints.txt里的几个参考点进行线性插值后的点集。
算法代码实现大致流程:
参数初始化→找到当前最近点与最近距离(横向误差)→计算参考航向→判断横向误差符号→计算![]()
![]() →下发控制量
→下发控制量
3.1 找到附近小段轨迹中的距离车辆的最近点
思路就是遍历waypoints小段轨迹点集,依次求出距离,初始最近距离设置为无穷大,最近点索引为0,然后后面若发现有更小的距离,则更新最近距离min_dist和最近点索引 min_idx。
#找到最近的路径点索引
min_idx = 0
min_dist = float("inf")
for i in range(len(self._waypoints)):
dist = np.linalg.norm(np.array([
self._waypoints[i][0] - x_f,
self._waypoints[i][1] - y_f])) #出现“Unexpected indent”原因可能之一,可能是你的函数或哪一行的缩进出了问题,if 跟dist缩进一样的属于for循环下
if dist < min_dist: #每个i比较是否比min_dist要小,将if放错位置缩进不对顶格导致每次都取了最后一个i,因为无论距离多少肯定比inf小导致控制量很大原地转圈
min_dist = dist
min_idx = i 3.2 参考航向的计算
Final project的设定是车辆的实际状态x,y,phi,v都会由传感器给出数值,实际航向角(车速方向与x轴所成角,-pi-pi)为yaw,但是如上原理所述Stanley算法中要用到参考航向角。
参考航向角的计算思路:
程序中跟踪路径横向控制时是将路径距车辆最近点作为参考点,这里将最近点与其下一个点的连线方向作为参考航向(若最近点是点集中的最后一个点,则采用最近点上一个点与最近点的连线作为参考航向),代码如下:
atan2计算出来的角度会自动转换到-pi到pi,航向角的设定就是-pi到pi
#设定目标点
tx=waypoints[min_idx][0]
ty=waypoints[min_idx][1]
#判断用下一个点还是上一个点与当前目标点的连线作为参考航向
##重要!!!因为yaw 这里定义的范围是有负值的而不是0-2pi,是-pi到pi,那么th也-pi到Pi即可,否则有问题
if min_idx<len(self._waypoints)-1:
#不是最后一个点就用下一个点计算参考航向
th=math.atan2(waypoints[min_idx+1][1]-waypoints[min_idx][1],waypoints[min_idx+1][0]-waypoints[min_idx][0])
else:
th=math.atan2(waypoints[min_idx][1]-waypoints[min_idx-1][1],waypoints[min_idx][0]-waypoints[min_idx-1][0])3.3 判断横向误差的符号
看了几个CSDN上的排在前面的答案,移植到python中做这个FinalProject时,发现都是有漏洞的,用来做这个project经常冲出跑道。看的几个博客常见的一种思路,就是:

简单的把车在参考点切线的右侧(Axr+Byr+C>0)作为负(Coursera Finalproject里定义向左转为负的转向角),车子在在参考点切线的左侧(Axr+Byr+C<0)作为正,简单的这样判断方向,当同一段轨迹,小车是向右上方运动时,Ax+By+C>0左转还没错,
当小车是反向向左下方跟踪轨迹时,Ax+By+C>0左转就有问题了,反而偏离了轨迹。
下面介绍一种在Github上看到的新方法。

用参考路径的第一个参考点P0与小车位置P的连线与x轴所成角![]() ,最近参考点的切线方向的航向角
,最近参考点的切线方向的航向角![]() ,这种角度均在-pi到pi之间,航向角是-pi-pi,atan2计算出来的角度也是-pi到pi。
,这种角度均在-pi到pi之间,航向角是-pi-pi,atan2计算出来的角度也是-pi到pi。

上图如果小车向右上方运动![]() ,左拐没问题,横向误差为负。
,左拐没问题,横向误差为负。

如果小车向左下方运动,

小车需向右拐,则横向误差为正,也正确。
在Finalproject里坐标系是反的,则上述规则刚好反过来即可。


代码如下:
#判断error的符号
#计算第一个参考点到当前位置的连线与x轴所成角
yaw_cross_track = np.arctan2(y_f-waypoints[0][1], x_f-waypoints[0][0])
#waypoints里的第一个点到当前位置连线角度与参考航向之间的夹角计算
yaw_path2ct = th - yaw_cross_track
if yaw_path2ct > np.pi:
yaw_path2ct -= 2 * np.pi
if yaw_path2ct < -np.pi:
yaw_path2ct += 2 * np.pi
# yaw_path2ct>0就是正的
if yaw_path2ct > 0:
error = abs(error)
else:
error = - abs(error)
#3.4 角度加减后范围的限制
整个程序里的角度范围都是-pi到pi,无论是航向角还是求反正切出来的值,
但是两个角度加减后可能超出范围,都要转化到这个范围内。代码如下:
#waypoints里的第一个点到当前位置连线角度与参考航向之间的夹角计算
yaw_path2ct = th - yaw_cross_track
if yaw_path2ct > np.pi:
yaw_path2ct -= 2 * np.pi
if yaw_path2ct < -np.pi:
yaw_path2ct += 2 * np.pi3.5 运行结果




与我另外两篇博客介绍的Pure Pursuit纯跟踪, MPC横向控制并没有看出明显优劣,因为参数的设置相对都比较随意。但是都能够很好的完成轨迹跟踪的任务。
运行视频链接
https://www.bilibili.com/video/BV1kB4y1F7sU
源码链接
https://download.csdn.net/download/weixin_39199083/18814608
















 2127
2127











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











