







 本文详细介绍了CUDA中GPU基础算法的实现,包括Reduce、Scan和Histogram。Reduce通过并行化操作降低了步数,例如加法操作的step complexity可以降低到log2n。Scan算法如Hillis + Steele和Blelloch方法在不同场景下有不同的效率。Histogram的并行实现则探讨了使用原子操作、局部内存加Reduce以及排序后再Reduce的方法。这些并行算法在现代GPU计算中具有重要应用。
本文详细介绍了CUDA中GPU基础算法的实现,包括Reduce、Scan和Histogram。Reduce通过并行化操作降低了步数,例如加法操作的step complexity可以降低到log2n。Scan算法如Hillis + Steele和Blelloch方法在不同场景下有不同的效率。Histogram的并行实现则探讨了使用原子操作、局部内存加Reduce以及排序后再Reduce的方法。这些并行算法在现代GPU计算中具有重要应用。
———-
1. Task complexity
task complexity包括step complexity(可以并行成几个操作) & work complexity(总共有多少个工作要做)。
e.g. 下面的tree-structure图中每个节点表示一个操作数,每条边表示一个操作,同层edge表示相同操作,问该图表示的task的step complexity & work complexity分别是多少。
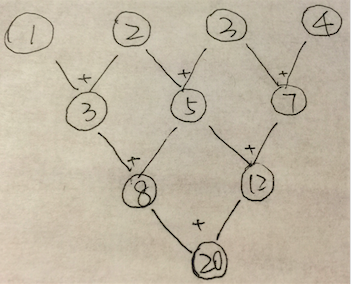
Ans:
step complexity: 3;
work complexity: 6。
下面会有更具体的例子。
2. Reduce
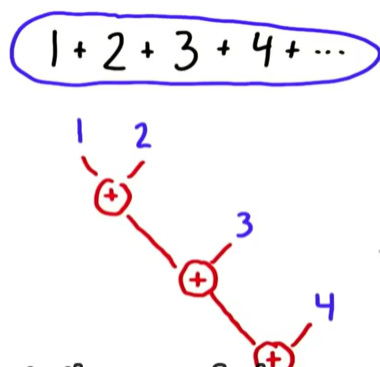
引入:我们考虑一个task:1+2+3+4+…
1) 最简单的顺序执行顺序组织为((1+2)+3)+4…
2) 由于operation之间没有依赖关系,我们可以用Reduce简化操作,它可以减少serial implementation的步数。
2.1 what is reduce?
Reduce input:
- set of elements
- reduction operation
- binary: 两个输入一个输出
- 操作满足结合律: (a@b)@c = a@(b@c), 其中@表示operator
e.g +, 按位与 都符合;a^b(expotentiation)和减法都不是
2.1.1 Serial implementation of Reduce:
reduce的每一步操作都依赖于其前一个操作的结果。比如对于前面那个例子,n个数相加,work complexity 和 step complexity都是O(n)(原因不言自明吧~)我们的目标就是并行化操作,降下来step complexity. e.g add serial reduce -> parallel reduce。
2.1.2 Parallel implementation of Reduce:
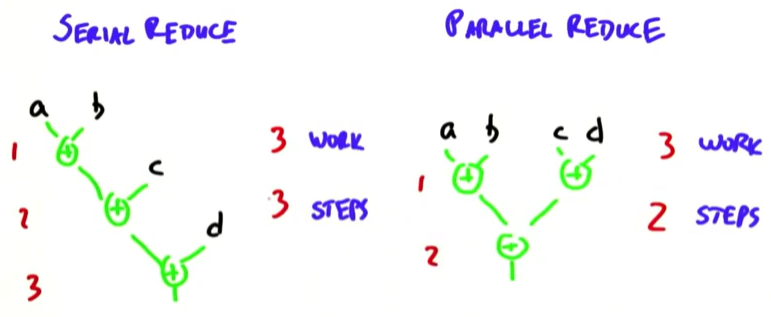
也就是说,我们把step complexity降到了 log2n
举个栗子,如下图所示:
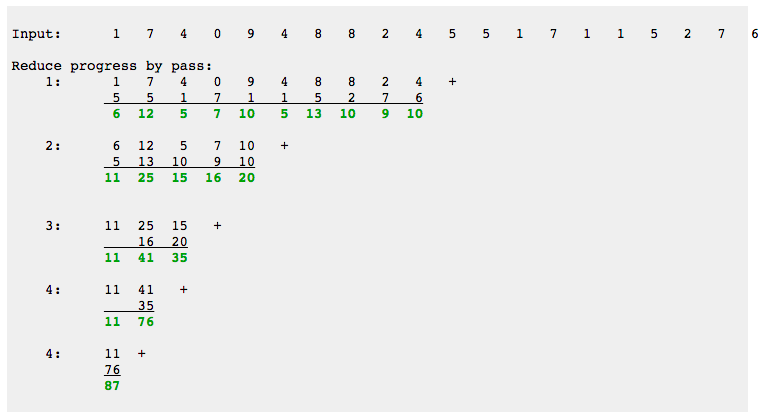
那么如果对 210 个数做parallel reduce add,其step complexity就是10. 那么在这个parallel reduce的第一步,我们需要做512个加法,这对modern gpu不是啥大问题,但是如果我们要对 220 个数做加法呢?就需要考虑到gpu数量了,如果说gpu最多能并行做512个操作,我们就应将 220 个数分成1024*1024(共1024组),每次做 210 个数的加法。这种考虑task规模和gpu数量关系的做法有个理论叫Brent’s Theory. 下面我们具体来看:
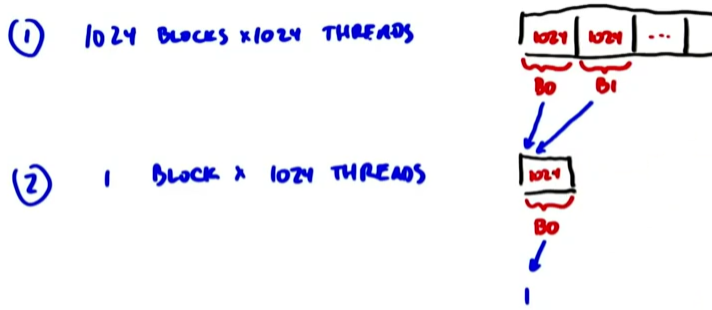
也就是进行两步操作,第一步分成1024个block,每个block做加法;第二步将这1024个结果再用1个1024个thread的block进行求和。kernel code:
__global__ void parallel_reduce_kernel(float *d_out, float* d_in){
int myID = threadIdx.x + blockIdx.x * blockDim.x;
int tid = threadIdx.x;
//divide threads into two parts according to threadID, and add the right part to the left one, lead to reducing half elements, called an iteration; iterate until left only one element
for(unsigned int s = blockDim.x / 2 ; s>0; s>>=1){
if(tid<s){
d_in[myID] += d_in[myID + s];
}
__syncthreads(); //ensure all adds at one iteration are done
}
if (tid == 0){
d_out[blockIdx.x] = d_in[myId];
}
}Quiz: 看一下上面的code可以从哪里进行优化?
Ans:我们在上一讲中提到了global,shared & local memory的速度,那么这里对于global memory的操作可以更改为shared memory,从而进行提速:
__global__ void parallel_shared_reduce_kernel(float *d_out, float* d_in){
int myID = threadIdx.x + blockIdx.x * blockDim.x;
int tid = threadIdx.x;
extern __shared__ float sdata[];
sdata[tid] = d_in[myID];
__syncthreads();
//divide threads into two parts according to threadID, and add the right part to the left one, lead to reducing half elements, called an iteration; iterate until left only one element
for(unsigned int s = blockDim.x / 2 ; s>0; s>>=1){
if(tid<s){
sdata[tid] += sdata[tid + s];
}
__syncthreads(); //ensure all adds at one iteration are done
}
if (tid == 0){
d_out[blockIdx.x] = sdata[myId];
}
}
优化的代码中还有一点要注意,就是声明的时候记得我们第三讲中说过的kernel通用表示形式:
kernel<<<grid of blocks, block of threads, shmem>>>parallel_reduce_kernel<<<blocks, threads, threads*sizeof(float)>>>(data_out, data_in);好,那么问题来了,对于这两个版本(parallel_reduce_kernel 和 parallel_shared_reduce_kernel), parallel_reduce_kernel比parallel_shared_reduce_kernel多用了几倍的global memory带宽? Ans: 分别考虑两个版本的读写操作:
parallel_reduce_kernel| Times | Read Ops | Write Ops |
| 1 | 1024 | 512 |
| 2 | 512 | 256 |
| 3 | 256 | 128 |
| … | ||
| n | 1 | 1 |
parallel_shared_reduce_kernel| Times | Read Ops | Write Ops |
| 1 | 1024 | 1 |
所以,parallel_reduce_kernel所需的带宽是parallel_shared_reduce_kernel的3倍。
3. Scan
3.1 what is scan?
Example:
- input: 1,2,3,4
- operation: Add
- ouput: 1,3,6,10(out[i]=sum(in[0:i]))
目的:解决难以并行的问题
拍拍脑袋想想上面这个问题O(n)的一个解法是out[i] = out[i-1] + in[i].下面我们来引入scan。
Inputs to
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1042
1042

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









